

AZD-KRD(AZ系列小型驱动器)开发
电子说
描述
AZD-KRD(AZ系列小型驱动器)开发
近年来,关节机器人等自动化设备变得越来越小,越来越轻,因此越来越需要将驱动器放置在更靠近电机的位置以节省空间。由于其激进的设计,AZD-KRD 紧凑型驱动器的体积比传统产品更小。这是通过以下方式实现的:取消开关,用 RS-485 通信取代 I/O 控制,并重新设计连接器和外壳的结构。此外,为减少布线,驱动器采用菊花链连接,将电源线和通信线组合到一个连接器中。为了进一步增强产品,AZD-KRD 配备了无电池绝对系统和多种操作功能。本文将详细解释小型化是如何实现的。
一、简介
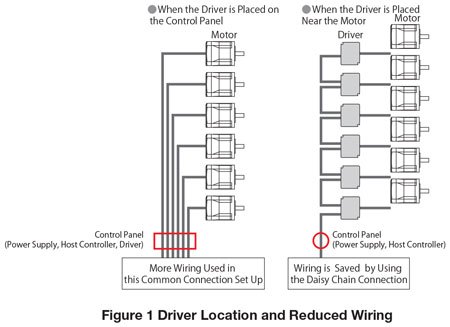
替代人工的自动化设备的引入取得了进展。在前几代产品中,驱动器安装在控制面板内,接线连接到电机。这种布线占用大量空间并且可能难以布线。此外,电缆会给电机增加额外的负载,这可能需要更大的电机来满足更高的需求。布线是影响设备尺寸的因素之一。为了减少接线,需要将驱动器靠近电机放置,如图 1 所示。
Oriental Motor 开发了 AZ 系列紧凑型驱动器(AZD-KRD),以满足小型、轻量、减少接线的驱动器的需求。

2.驱动器小型化
2.1 优化驱动界面
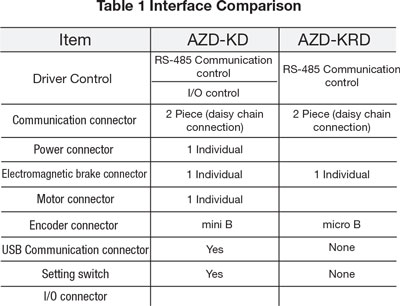
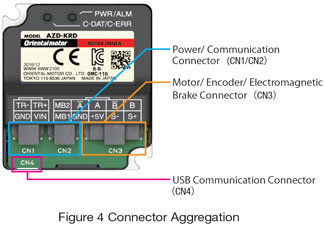
使驱动器更小的挑战之一是如何减少连接器和开关占用的空间。AZD-KRD 将电源线和通信线整合到一个连接器中,将电机、编码器和电磁制动器整合到另一个连接器中。AZD-KRD 由 RS-485 通信控制,因此可以移除开关和 I/O 连接器。通过使用我们的 MEXE02 支持软件,可以通过专用 USB 连接从 PC 更改驱动程序设置。表 1 比较了传统的 AZD-KD 和 AZD-KRD 迷你接口。图 4 显示了 AZD-KRD 连接器的布局。
2.2 高密度贴装元器件
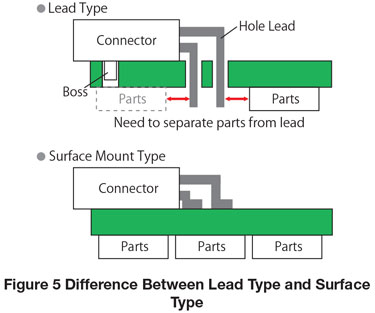
减小印刷威廉希尔官方网站 板的尺寸可以减少电子元件的安装面积。因此,有效利用板空间对于使驱动器更小是必不可少的。KRD采用表面贴装连接器和无螺丝结构,有效利用威廉希尔官方网站 板空间。使用通孔连接器时,威廉希尔官方网站 板另一侧的元件需要远离焊点。这会导致 PBC 板上的空间浪费。AZD-KRD 采用表面贴装型连接器,因此可以在同一区域安装更多组件(图 5)。
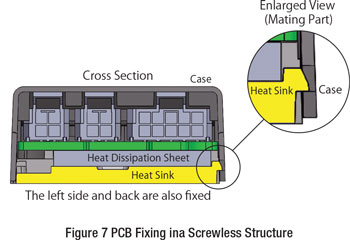
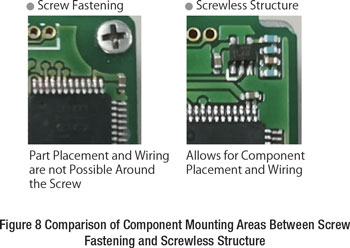
PCB 和散热器通常用螺丝固定。用螺钉固定需要孔周围有死角,从而防止元件或走线放置在附近,这实际上减少了元件的安装表面。AZD-KRD 采用无螺丝设计,可实现最大的安装表面。
外壳的所有四个侧面都有闩锁。PCB和散热片夹在外壳和散热器之间。外壳和散热器在四个侧面锁定,如图 7 所示。
2.3. 热量措施
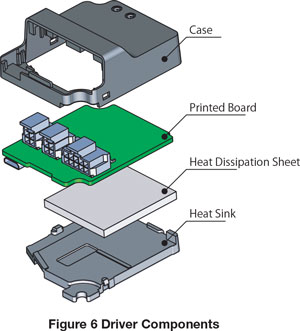
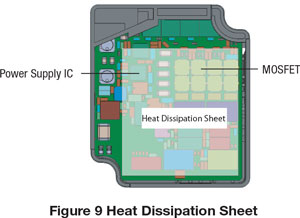
由于元器件的高密度贴装,会增加发热量,需要采取散热措施。AZD-KRD 采用对策,将所有发热元件放置在 PCB 的背面,在那里它们可以直接通过散热片散热(图 9)。
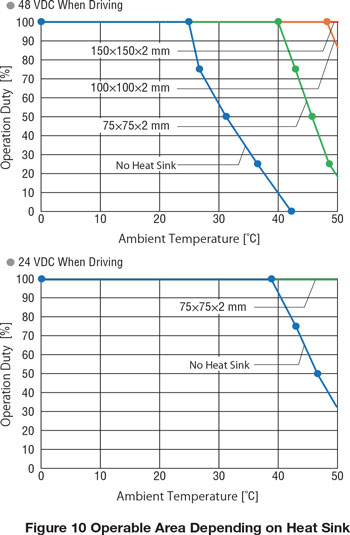
当与 150x150x2 mm 铝散热器一起使用时,AZD-KRD 环境温度规格为 0~50°C。但是,也可以使用其他尺寸和材料。散热量难以预测,因此最好通过网络通讯或专用软件监测 AZD-KRD 的内部温度。
在产生过热警报之前,驱动器内部温度的阈值是 85°C。图 10 显示了环境温度与散热器尺寸不同时的工作负载之间的关系。
无论负载如何,步进电机驱动器都以恒定电流控制电机。然而,当转速变高时,由于电机产生的反电动势,流向电机的电流会减少。由于这种行为,驱动器在低速、恒定电流区域产生的热量最多。图 10 显示了触发过热保护之前的工作限制。例如,使用 100x100x2 毫米散热器的 48VDC 输入驱动器可以在高达 50°C 的温度下以 85% 的占空比运行。
2.4. 有效利用再生能源
AZD-KD内置再生处理威廉希尔官方网站
,产生的再生电力可消耗在各驱动器中。相反,由于驱动器旨在用于多轴菊花链连接,因此可以在驱动器之间有效地使用电机产生的再生电力。因此,电机产生的再生电能通过电源线配置回馈电源,每台AZD-KRD驱动器都没有内置再生处理威廉希尔官方网站
。
另一方面,根据运行条件、负载条件和连接台数,驱动器之间可能无法完全消耗再生电力。为了满足轴驱动和节拍时间短的运转等产生更大再生功率的运转的要求,我们计划提供再生处理威廉希尔官方网站
作为选项。
3.使用更少的接线
3.1. AZD-KRD接线
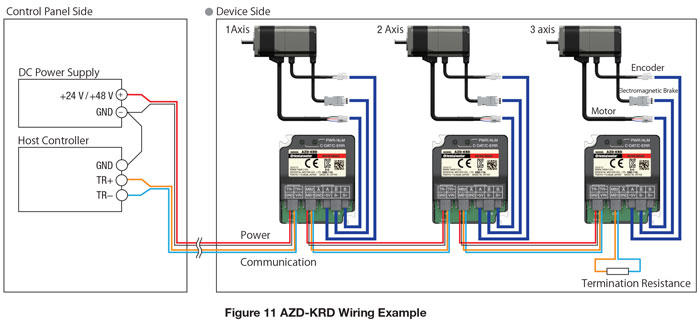
图 11 是 AZD-KRD 接线示意图的示例。电源和主机控制器放置在控制面板内。电源和通信可以连接到同一个连接器。AZD-KRD 的菊花链功能允许驱动器为下一个驱动器供电并与其通信。距离主机控制器最远的驱动器也需要一个终端电阻。
3.2. 减少布线的示例
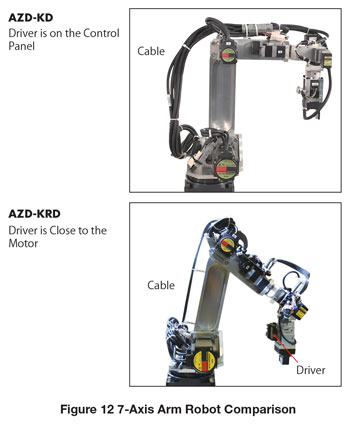
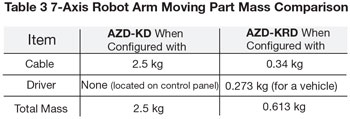
图 12 显示了使用传统驱动器与 AZD-KRD 的 7 轴机器人的接线比较。传统的驱动器安装在控制面板内,每台电机和传感器电缆都将连接到单独的电机。由于多根线缆捆绑布线,布线繁琐,占用空间,增加机械臂质量。另一方面,AZD-KRD 可以靠近电机放置,并且通过简化驱动器之间的布线,运动部件的总质量是传统系统的四分之一。
3.3. 电缆延长距离
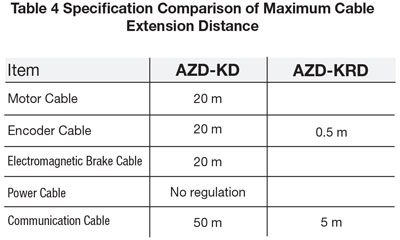
AZD-KRD为了减少配线,电源线和通信线使用共用电缆。但是,这会给系统带来噪声。
为此,AZD-KRD 在其威廉希尔官方网站
中设计了一个噪声滤波器。电缆越长,越容易受到噪音的影响,因此所有菊花链连接的总长度必须小于 5 米。电机电缆、编码器电缆、电磁制动器电缆以配线的简易性为中心,使用无屏蔽的导线。因此最大延伸距离为0.5米。
3.4. AZD-KRD直联电机
为了减轻重量、减少布线并提高连接的便利性,传统的屏蔽电缆被导线类型取代。AZD-KRD 的直接连接电机阵容可以直接连接到驱动器,也可以使用转换电缆将标准 AZ 电机连接到 AZD-KRD。

4.功能
4.1. AZ 系列特点
AZD-KRD 是一种内置于紧凑型驱动器中的无电池绝对系统。此外,还有各种操作和功能可用,例如存储数据操作和简单序列功能。
关节型机器人采用步进电机的优点是:定位精度高、响应性高、调谐少、使用无电池绝对式编码器可快速归位。AZ 系列的标准安装尺寸适用于 20 毫米至 60 毫米的电机尺寸。Oriental Motor 还提供齿轮电机、电动滑块、电动缸、中空旋转执行器、电动夹具等多种产品系列。

4.2. 支持
ROS(机器人操作系统)是一种用于机器人的开源操作系统,由于它可以轻松地同时移动传感器、执行器和机器人,因此在全球范围内变得越来越流行。Oriental Motor 有一个 ROS 包,可以让我们的产品通过 Modbus RTU 进行通信。图 15 显示了控制节点和 Modbus RTU 节点之间的配置示例。
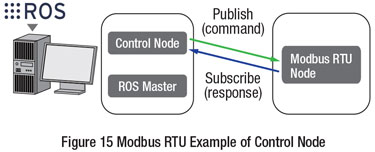
主机设备和驱动程序之间的通信需要更高级别的设备创建查询、发送查询和处理响应。由于Modbus RTU包中包含了通讯定时、错误校验等功能,因此无需编写通讯代码。
5.总结
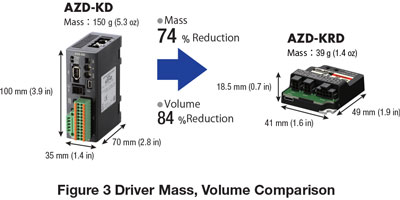
AZD-KRD 是一种产品,具有更小、更轻的驱动器,减少了布线,专注于机器人应用。通过重新审视接口和结构,与传统产品相比,我们实现了尺寸的显着减小。此外,驱动器可以安装在电机附近,布线可以菊花链式连接,从而进一步减小系统尺寸。尽管体积小,AZD-KRD 配备了与其较大的兄弟姐妹相同的功能。有了可用的 ROS 包,它可以用于各种机器人应用程序。今后,我们将继续开发满足客户需求的产品和技术。
审核编辑:汤梓红
-
东方马达步进电机AZM66AK-HS100+AZD-KD主要实现的功能2021-08-31 0
-
安森美ONSEMI 扩充汽车驱动器系列2010-02-06 524
-
EXB系列驱动器的功能方框威廉希尔官方网站2010-02-18 1330
-
IGD系列IGBT驱动器内部框威廉希尔官方网站2010-02-19 2138
-
TI推出业界最小型1.8A有刷DC电机驱动器DRV8x2012-08-20 1351
-
满足汽车LCD显示器 新日本无线开发背光用LED驱动器2012-11-15 1364
-
NCP5612型高效超小型最薄白光LED驱动器2017-04-13 841
-
ES系列的驱动器的控制及故障处理2017-09-26 941
-
日本照明市场成功开发出业界最小的LED驱动器2018-03-20 7492
-
小型泛用无感向量驱动器VFD-M系列使用手册2023-01-29 423
-
如何使用MAXQ串行驱动器开发应用2023-03-03 871
-
CVK系列步进电机和驱动器套件的特点2023-03-07 2648
-
入门电机系列之2驱动器2023-03-17 326
-
驱动器和电机驱动器的概念2023-09-18 3074
-
伺服驱动器资料2024-11-24 182
全部0条评论

快来发表一下你的评论吧 !
