

 е°ҸеһӢе№іиЎҢеұҘеёҰеә•зӣҳе®һзҺ°еҸҢзҒ°еәҰеҫӘиҝ№еҠҹиғҪ
е°ҸеһӢе№іиЎҢеұҘеёҰеә•зӣҳе®һзҺ°еҸҢзҒ°еәҰеҫӘиҝ№еҠҹиғҪ
з”өеӯҗиҜҙ
1.3wдәәе·ІеҠ е…Ҙ
жҸҸиҝ°
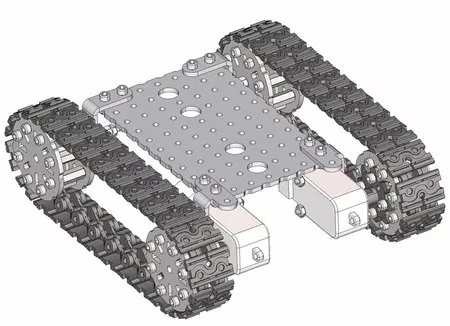
1. еҠҹиғҪиҜҙжҳҺ
В В еңЁе°ҸеһӢе№іиЎҢеұҘеёҰеә•зӣҳж ·жңәдёҠе®үиЈ…2дёӘ зҒ°еәҰдј ж„ҹеҷЁ пјҢе®һзҺ°жңәеҷЁдәәжІҝжҢҮе®ҡи·ҜзәҝиҝӣиЎҢиҝҗеҠЁзҡ„ж•ҲжһңгҖӮ

2. дҪҝз”Ёж ·жңә
В В жң¬е®һйӘҢдҪҝз”Ёзҡ„ж ·жңәдёәR026aж ·жңәгҖӮ
3. еҠҹиғҪе®һзҺ°
3.1 з”өеӯҗ硬件
еңЁиҝҷдёӘзӨәдҫӢдёӯпјҢжҲ‘们йҮҮз”ЁдәҶд»ҘдёӢ硬件пјҢиҜ·еӨ§е®¶еҸӮиҖғпјҡ
| дё»жҺ§жқҝ | BasraпјҲе…је®№Arduino Unoпјү |
| жү©еұ•жқҝ | Bigfish2.1 |
| дј ж„ҹеҷЁ | зҒ°еәҰдј ж„ҹеҷЁ |
| з”өжұ | 7.4Vй”Ӯз”өжұ |
3.2 зј–еҶҷзЁӢеәҸ
зј–зЁӢзҺҜеўғпјҡArduino 1.8.19
зј–еҶҷ并зғ§еҪ•д»ҘдёӢзЁӢеәҸпјҲ2gray_blackline.inoпјүпјҢиҜҘзЁӢеәҸе°Ҷе®һзҺ°жј”зӨәеҠЁеӣҫдёӯзҡ„еҠЁдҪңгҖҗдҫӢзЁӢжәҗд»Јз Ғиө„ж–ҷдёӢиҪҪиҜҰи§Ғ https://www.robotway.com/h-col-114.htmlгҖ‘
В
/*------------------------------------------------------------------------------------
зүҲжқғиҜҙжҳҺпјҡCopyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by жңәеҷЁи°ұ 2023-02-09 https://www.robotway.com/
------------------------------
е®һйӘҢжҺҘзәҝпјҡдёӨдёӘзӣҙжөҒз”өжңәжҺҘеҸЈзҡ„й’Ҳи„ҡеҸ·еҲҶеҲ«дёәD5,D6д»ҘеҸҠD9,D10;зҒ°еәҰдј ж„ҹеҷЁиҝһеңЁA0гҖҒA4жҺҘеҸЈдёҠ
------------------------------------------------------------------------------------*/
int i=0;
void Forward();
void Back();
void Turn_left();
void Turn_right();
void Speed_up();
void Slow_down();
void setup() {
// put your setup code here, to run once:
pinMode(A0,INPUT);
pinMode(A4,INPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
int a=digitalRead(A0);
int b=digitalRead(A4);
Serial.println(a);
Serial.println(b);//Here is serial monitor,you will kown in later learning
if(a==0&&b==0)
Forward();
if(a==1&&b==0)
Turn_left();
if(a==0&&b==1)
Turn_right();
}
void Forward()//
{
analogWrite(9,120);
analogWrite(10,0);
analogWrite(5,120);
analogWrite(6,0);
delay(50);
}
void Back()
{
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
digitalWrite(5,LOW);
digitalWrite(6,HIGH);
delay(4000);
}
void Turn_left()
{
digitalWrite(9,0);
digitalWrite(10,0);
digitalWrite(5,100);
digitalWrite(6,0);
delay(50);
}
void Turn_right()
{
digitalWrite(9,100);
digitalWrite(10,0);
digitalWrite(5,0);
digitalWrite(6,0);
delay(50);
}
void Speed_up()
{
for(i=0;i<=255;i+=5)
{
analogWrite(9,i);
analogWrite(10,0);
analogWrite(5,i);
analogWrite(6,0);
delay(50);
}//speed up
}
void Slow_down()
{
for(i=255;i>=0;i-=5)
{
analogWrite(9,i);
analogWrite(10,0);
analogWrite(5,i);
analogWrite(6,0);
delay(50);
}
}
В
е®Ўж ёзј–иҫ‘В й»„е®Ү
еЈ°жҳҺпјҡжң¬ж–ҮеҶ…е®№еҸҠй…Қеӣҫз”ұе…Ҙй©»дҪңиҖ…ж’°еҶҷжҲ–иҖ…е…Ҙй©»еҗҲдҪңзҪ‘з«ҷжҺҲжқғиҪ¬иҪҪгҖӮж–Үз« и§ӮзӮ№д»…д»ЈиЎЁдҪңиҖ…жң¬дәәпјҢдёҚд»ЈиЎЁз”өеӯҗеҸ‘зғ§еҸӢзҪ‘з«ӢеңәгҖӮж–Үз« еҸҠе…¶й…Қеӣҫд»…дҫӣе·ҘзЁӢеёҲеӯҰд№ д№Ӣз”ЁпјҢеҰӮжңүеҶ…е®№дҫөжқғжҲ–иҖ…е…¶д»–иҝқ规问йўҳпјҢиҜ·иҒ”зі»жң¬з«ҷеӨ„зҗҶгҖӮ
дёҫжҠҘжҠ•иҜү
-
и“қзүҷйҒҘжҺ§еұҘеёҰеә•зӣҳиЎҢ驶2022-12-16 685
-
жӯЈдёүи§’еұҘеёҰеә•зӣҳзҡ„еҲ¶дҪңеҲҶдә«2023-01-18 918
-
еұҘеёҰжңәеҷЁдәә йҮ‘еұһеә•зӣҳ2012-08-14 0
-
еұҘеёҰеә•зӣҳзҡ„з»“жһ„йғЁеҲҶ2019-02-19 0
-
еҫӘиҝ№жҷәиғҪе°ҸиҪҰжҳҜз”ұе“ӘдәӣйғЁеҲҶз»„жҲҗзҡ„2021-07-14 0
-
dfrobotи·ҜиҷҺ5еұҘеёҰеә•зӣҳз®Җд»Ӣ2019-12-01 1369
-
дҪҝз”Ёд»ҘеҸҢзҒ°еәҰдј ж„ҹеҷЁе®һзҺ°зҡ„жӣІзәҝеҫӘиҝ№д»ҘеҸҠзҹ©еҪўеҫӘиҝ№зҡ„иө„ж–ҷиҜҙжҳҺ2019-12-23 1733
-
ж–ңдёүи§’еұҘеёҰеә•зӣҳзҡ„еҲ¶дҪң2022-12-14 2083
-
е°ҸеһӢеҸҢиҠӮеұҘеёҰеә•зӣҳзҡ„еҲ¶дҪң2023-01-07 854
-
е°ҸеһӢе№іиЎҢеұҘеёҰеә•зӣҳзҡ„еҲ¶дҪңеҲҶдә«2023-01-12 3140
-
е°ҸеһӢдёүиҠӮеұҘеёҰеә•зӣҳзҡ„еҲ¶дҪң2023-01-29 1207
-
еҰӮдҪ•и®©е°ҸеһӢеҸҢиҪ®е·®йҖҹеә•зӣҳе®һзҺ°еҸҢзҒ°еәҰеҫӘиҝ№еҠҹиғҪ?2023-03-03 484
-
еҸҢиҪ®е·®йҖҹеә•зӣҳдёүзҒ°еәҰеҫӘиҝ№еҠҹиғҪзҡ„е®һзҺ°2023-03-03 802
-
е°ҸеһӢе№іиЎҢеұҘеёҰеә•зӣҳе®һзҺ°зәўеӨ–йҒҝйҡңеҠҹиғҪ2023-03-09 542
-
е°ҸеһӢе№іиЎҢеұҘеёҰеә•зӣҳе®һзҺ°и¶…еЈ°йҒҝйҡңеҠҹиғҪ2023-03-09 474
е…ЁйғЁ0жқЎиҜ„и®ә

еҝ«жқҘеҸ‘иЎЁдёҖдёӢдҪ зҡ„иҜ„и®әеҗ§ !
