

舵机中的直流电机控制原理和方法
描述
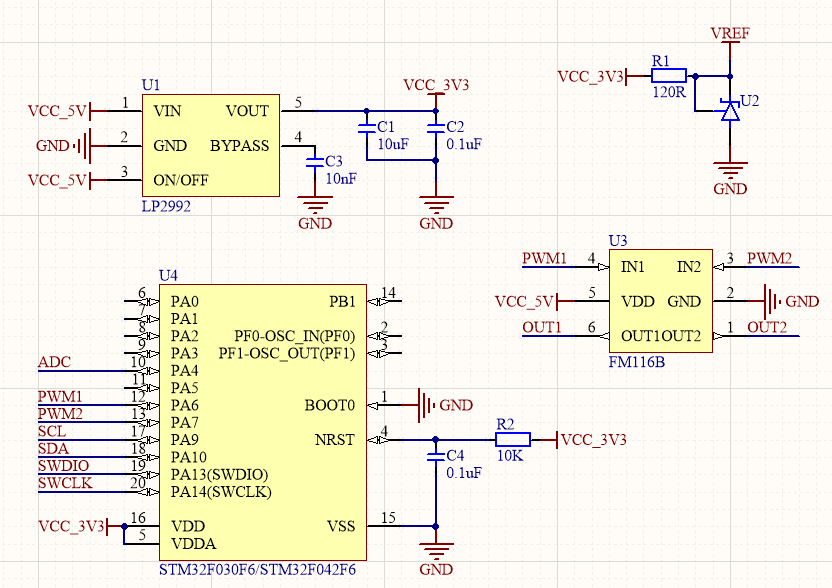
本文简单介绍在舵机中的直流电机控制原理和方法。下图是控制器原理图,单片机选择stm32f030,驱动选择fm116b,ldo为lp2992,这个可以任意选择兼容的芯片,电压反馈端用tl431进行分流稳压,确保反馈电阻器供电电压的稳定。
舵机的工作原理很简单,处理器实时获取电阻器的ADC值来计算获得当前的角度,如果与预期的角度一致,就不做任何操作,保持当前状态;如果与预期角度不同,就计算出当前角度与预期角度的差值,然后通过PID算法计算出控制量,根据控制量输出PWM控制电机旋转,随着电机旋转,实时角度会越来越接近预期值,控制输出也会越来越小,直到最后为0,就转到了预期的位置。
本方案通过I2C接口获取控制命令,可以实现比传统模拟方式更多的功能。
PWM1和PWM2控制电机转速和方向,当PWM1输出高电平而PWM2输出低电平就是正转,反之就是反转,如果二者都输出低电平就停止。
ADC值需要标定,确定舵机角度为0和180时的ADC采样值,这样才能通过比例计算出任意ADC值对应的角度。
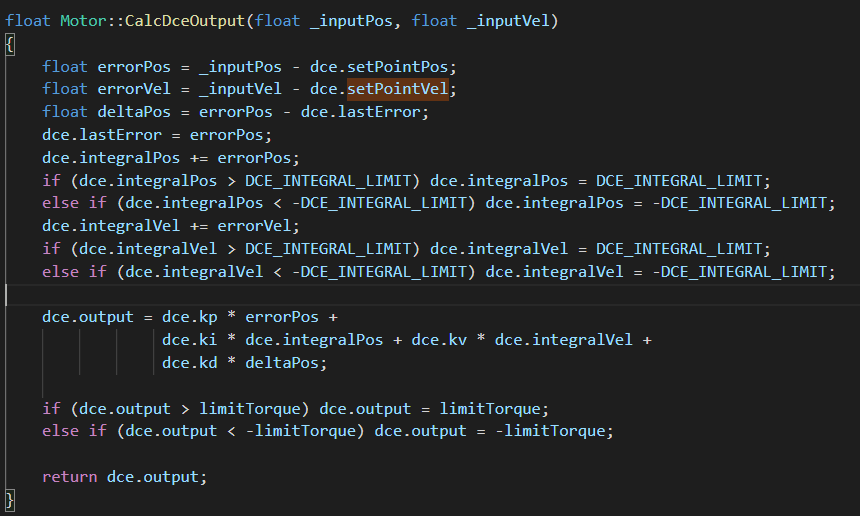
PID这里,ADC得到的角度减去预期角度就是角度差,乘以比例系数构成比例项;角度差的和乘以积分系数构成积分项,积分项要设置上限,防止该值过大影响响应速度;本次角度差与上一次的角度差的差乘以微分系数构成微分项(这里用固定的时间采样,dt固定,故不需要计算变化率了)。三者之和就是预期的输出值,再根据输出限制得到最终的输出值,该值可正可负,注意变量选取要合适。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
直流电机2010-01-09 4038
-
直流电机PWM控制2016-11-08 1648
-
微型直流电机非常容易控制的原因2020-11-14 3060
-
直流电机的控制2021-05-19 980
-
无刷直流电机运行原理与基本控制2021-09-15 1573
-
动手玩转Arduino---运动控制(直流电机步进电机舵机)2021-09-23 1066
-
驱动有刷直流电机的简便方法2023-02-15 3303
-
直流电机控制的基本方法2023-03-26 7341
-
直流电机及PWM介绍2023-03-30 415
-
直流电机调速介绍2023-03-30 388
-
直流电机调速实验2023-03-30 383
-
直流电机测试方法2023-06-14 5204
-
永磁无刷直流电机的控制方法2024-06-03 1356
-
直流电机的应用原理及控制原理是什么?2024-10-22 318
全部0条评论

快来发表一下你的评论吧 !
