

探索 Jetson Nano 为 myCobot 280 提供的强大功能
电子说
描述
探索 Jetson Nano 为 myCobot 280 提供的强大功能,机器人技术的一个有前途的组合
介绍
近年来,科学技术的发展给我们的生活带来了许多新的产品和服务,包括机器人在各个领域的集成。机器人已经成为我们生活中必不可少的一部分,从送货机器人到智能家居语音助手。
在本文中,我们将讨论myCobot 280 Jetson Nano,这是一种能够进行科学实验和教育方面的机械臂。
什么是Jetson Nano?
Jetson Nano 的尺寸仅为 70 x 45 毫米,比信用卡略小,是一种适用于机器学习应用的模块系统 (SoM)。因为它只消耗大约 5 到 10 瓦的功率,所以它是边缘应用中 AI 的绝佳工具。

Jetson Nano有一个基于Maxwell的GPU,其中包含128个CUDA内核,能够每秒计算5 teraflops(.5 TFLOPs)。凭借其强大的ARM Cortex A57处理器和4GB LPDDR4 RAM,Nano是一款功能强大的小型计算机。它还支持多种外围设备,包括千兆以太网、HDMI 2.0、DisplayPort 1.4、2 个 DSI 连接器、一个 M.2 PCIe 连接器、4 个 USB 3.0 端口和两个 CSI 相机连接器(用于 Pi 相机等相机)。
它还具有一个40针GPIO连接器,其布局与Raspberry Pi相同,使制造商和开发人员能够轻松重用以前项目中的某些模块和威廉希尔官方网站 。
随着ChatGPT的出现,AI再次成为全球关注的焦点。从现在开始,值得从机械臂的角度了解人工智能趋势。
什么是myCobot 280 Jetson Nano?
myCobot 280 Jetson Nano是一种嵌入Jetson Nano的机械臂,Jetson Nano是一款小巧而强大的计算机,使手臂能够轻松执行复杂的任务。手臂的有效载荷为 250 克,这意味着它可以携带高达 250 克的物体。手臂设计灵活且用途广泛,具有六轴运动和高达 280 毫米的伸展范围。它是广泛应用的理想工具,包括教育、研究和 DIY 项目。
myCobot 280 Jetson Nano是一个开源的机械臂,这意味着源代码和硬件设计可供公众使用。这使用户能够修改和定制手臂以满足他们的特定需求。该arm还与各种软件和编程语言兼容,包括Python,ROS和myBlockly。
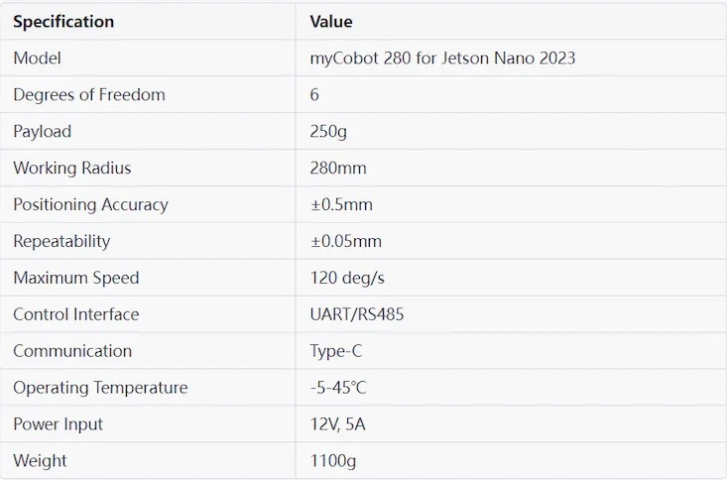
规范
让我们看一下下表,看看它的具体规格是什么样的。
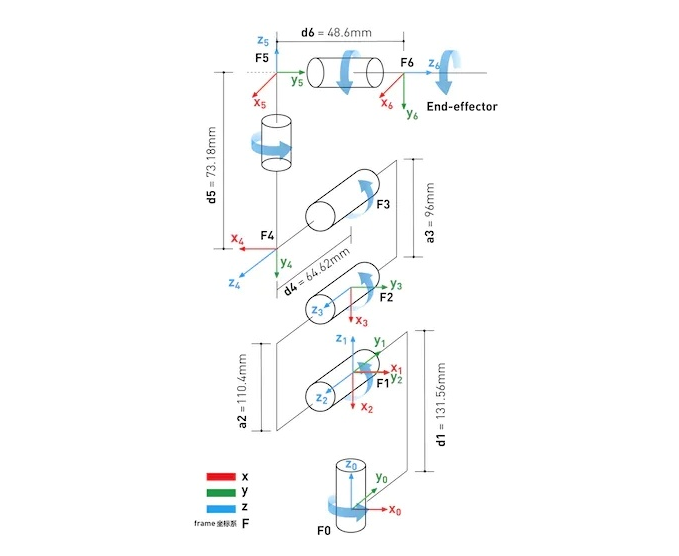
这是一个 DH 参数
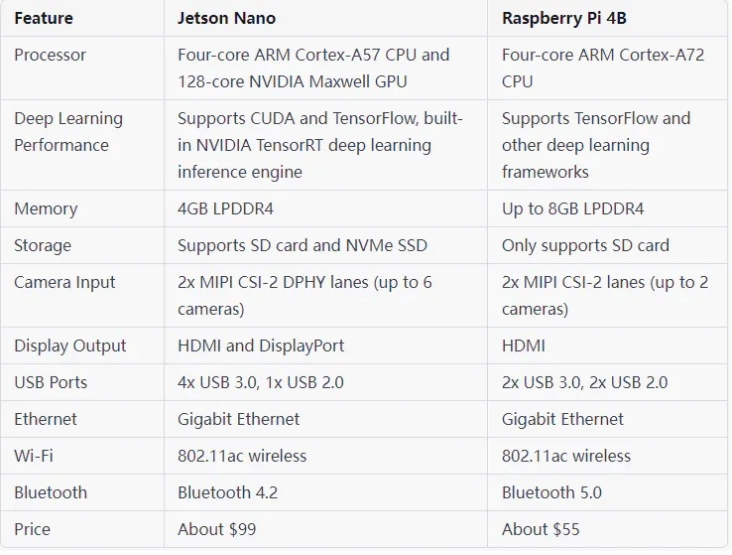
也许您对Jetson Nano和Raspberry Pi之间的区别感好奇。我们将简要介绍使用 Jetson Nano 作为机器人嵌入式手臂的优势。
在处理性能方面,Jetson Nano采用了四核ARM Cortex-A57 CPU和128核NVIDIA Maxwell GPU,比Raspberry Pi的四核ARM Cortex-A72 CPU更强大。ARM Cortex-A57 CPU采用64位架构,时钟速度为1.43GHz,提供更高的计算性能。NVIDIA Maxwell GPU 专为深度学习等高性能计算任务而设计,具有高并行计算和大规模浮点计算能力。
在深度学习性能方面,Jetson Nano的GPU支持CUDA、TensorFlow等深度学习框架,可以加速深度学习模型的训练和推理。此外,Jetson Nano 还嵌入了 NVIDIA TensorRT 深度学习推理引擎,进一步提升了深度学习模型的推理性能。虽然Raspberry Pi的性能也可以支持一些深度学习应用程序,但由于其处理器和GPU的限制,其性能相对较弱。
总体而言,如果一个项目需要高性能处理器,Jetson Nano将是最佳选择,而Raspberry Pi基于其庞大的社区和世界上最大的开源硬件数据而拥有自己的优势。
如何使用?
要开始使用myCobot280,我们只需要一台显示器、一个键盘和一个鼠标。我们可以使用一个名为pymycobot的Python库来控制myCobot280的移动,该库通过其开放的API提供了许多控制接口。有了这个库,我们可以轻松地为机器人手臂开发应用程序。
我们利用pymycobot提供的API来控制myCobot280的动作,并编排舞蹈表演。
import serial
from pymycobot import MyCobot
import time
mc = MyCobot('/dev/ttyTHS1',115200)
mc.send_angles([0,0,0,0,0,0],80)
time.sleep(1)
for count in range(2):
mc.send_angles([(-0.17),(-94.3),118.91,(-39.9),59.32,(-0.52)],80)
time.sleep(1.2)
mc.send_angles([67.85,(-3.42),(-116.98),106.52,23.11,(-0.52)],80)
time.sleep(1.7)
mc.send_angles([(-38.14),(-115.04),116.63,69.69,3.25,(-11.6)],80)
time.sleep(1.7)
mc.send_angles([2.72,(-26.19),140.27,(-110.74),(-6.15),(-11.25)],80)
time.sleep(1)
mc.send_angles([0,0,0,0,0,0],80)

我们还可以在机械臂的末端安装一个摄像头来探索机器视觉。
这是openCV开发的人脸识别功能的代码。
def image_info():
# load cascade
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# input photo
img = cv2.imread('maya.png')
# turn to grays
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# check human face
faces = face_cascade.detectMultiScale(img, 1.1, 4)
for (x, y, w, h) in faces:
cv2.rectangle(img, (x, y), (x+w, y+h), (255, 0, 0), 2)
center_x = (x+w-x)//2+x
center_y = (y+h-y)//2+y
cv2.circle(img,(center_x,center_y),20,(0,255,255),2)
# show
plt.imshow(img)
plt.show()
在Raspberry Pi 4B和Jetson Nano上运行此面部识别代码显示出明显的速度差异,Jetson Nano返回结果的速度比Raspberry Pi快1-2秒。
让我们先了解算力意味着什么。计算能力通常以每秒浮点运算数 (FLOPS) 来衡量。FLOPS是一秒钟内可以完成的浮点运算数,用于评估计算机系统的性能。在深度学习领域,FLOPS通常用于衡量模型的计算复杂度和性能。例如,具有较高 FLOPS 值的模型意味着它需要更多的计算资源进行训练和推理,但它也可能获得更好的性能。
Jetson Nano 配备了 472 GFLOPS 的 GPU 计算能力,而根据官方数据,Raspberry Pi 4B 的浮点性能约为 3 GFLOPS。这可以解释上述情况。
未来与展望
随着人工智能技术的不断发展,嵌入式机器人的应用前景越来越广阔。未来,我们可以期待这种嵌入式六轴机械臂具有更广泛的应用领域,涵盖更多领域。例如,在工业、医疗、农业和教育领域,这种机械臂具有广泛的应用前景。在工业领域,可用于生产线上的自动化生产,提高生产效率和质量;在医疗领域,可用于手术、康复等方面,帮助医生更好地为患者服务;在农业部门,可用于农业生产的种植、收获等各个环节,提高农业生产效率和质量;在教育领域,它可以用于机器人编程教育,帮助学生更好地学习编程和机器人技术。
除了应用领域的扩大,随着技术的不断进步,这种机械臂也将不断发展。例如,未来可能会出现更先进的控制算法,使手臂的运动更加精确和灵活;更先进的传感器技术可能会出现,使手臂能够更准确地感知周围环境;更先进的深度学习技术可能会出现,使手臂能够智能地完成各种任务。总之,这种嵌入式六轴机械臂具有广阔的应用前景和发展空间,我们可以期待它在未来继续创新和进步。
审核编辑 黄宇
-
jetson nano开发板2020-08-20 0
-
Jetson Nano简介2021-07-26 0
-
Jetson Nano具有哪些优势?Jetson Nano怎么安装?2021-09-28 0
-
Jetson Nano电源适配器有何功能2021-12-27 0
-
Jetson Nano是什么?有何作用2022-01-12 0
-
Made with KiCad(一):Jetson Nano Baseboard2023-06-27 0
-
armsom:为何选择rk3588开发与Jetson Nano引脚兼容的嵌入式产品2023-10-18 0
-
Banana Pi为何选择rk3588开发与Jetson Nano引脚兼容的嵌入式产品2023-11-02 0
-
NVIDIA宣布推出99美元的Jetson Nano 外观小巧却功能强大2019-03-19 4854
-
Jetson Nano让AI计算无处不在2019-05-15 7832
-
使用myCobot280 M5Stack控制器2022-10-18 512
-
使用Jetson Nano的CSI相机接口2022-11-30 1137
-
大象机器人myCobot 280 2023版全新功能展示2023-03-10 1399
-
Jetson Orin Nano纳米刷机介绍2023-04-01 3246
-
使用myCobot 280 Jeston Nano进行物体精确识别追踪2023-05-24 1706
全部0条评论

快来发表一下你的评论吧 !
