

联合空谱信息的高光谱图像噪声估计
电子说
描述
引言
高光谱图像是成像光谱仪对地物目标的成像结果,广泛应用于军事侦查、生态监控、矿质探测等领域。然而,高光谱图像光谱分辨率高,波段间隔较窄,更容易被噪声所破坏。精确估计高光谱图像的噪声水平,对去噪、降维、分类等后续处理至关重要。成像光谱仪数据的噪声主要包括周期性噪声和随机噪声,其中周期性噪声可以由频域变换滤波消除,而随机噪声的影响一直存在。一般认为这种随机噪声是加性噪声,用模型表示为

式中:y(i,j)为包含噪声的图像;x(i,j)为无噪的原始图像;n(i,j)为待估计的噪声,通常噪声为零均值的高斯噪声,概率密度函数为

因此,对噪声水平的估计,即是对噪声标准差σn的估计。
同质区域划分是许多噪声估计方法的关键步骤。Achanta等提出了一种基于K⁃means聚类的超像素分割算法,称为简单线性迭代聚类(SLIC)。它可以将图像中的像素沿着目标边界对图像进行分割,得到局部结构相似的图像块。基于这一特性,本文将其与多元线性回归模型结合,提出了基于超像素分割的光谱去相关法。该方法结合了SLIC和多元线性回归模型的优点,将SLIC结合光谱⁃空间相似性应用到高光谱图像同质区域划分中,可以得到精确的同质区域分割结果,克服了刚性的矩形划分所带来的同质区域划分不精确的影响。随后利用多元线性回归模型在划分的同质区域内去除光谱相关性,得到了更纯净的噪声残差图,使得噪声估计更为准确。
噪声估计方法
高光谱图像光谱分辨率高,通常可达2~10nm,相邻波段间具有较强的光谱相关性,基于这一特点,多元线性回归模型被广泛应用于高光谱图噪声估计。此类方法通常将图像划分为矩形块,在每个矩形区域内利用多元线性回归去除光谱相关性,得到近似为噪声的残差图。本文方法在多元线性回归模型基础之上,结合SLIC算法,将相似的光谱曲线聚类,以得到局部结构相似的同质区域划分。在同质区域内,由于光谱曲线相似,其相邻波段间的回归系数也相似,相比于在矩形区域内直接应用多元线性回归模型,在同质区域内应用多元线性回归可以得到更精确的噪声残差图。本文方法具体步骤如下:
(1)利用超像素分割将高光谱图像按空间地物类别划分同质区域;
(2)利用多元线性回归计算每个区域噪声标准差的估计;
(3)在残差图中计算噪声的最佳估计值。
2.1 超像素分割
超像素算法通过聚类将像素分组为局部结构相似的不规则图像块。SLIC是一种使用广泛的超像素分割方法,相较于其他超像素分割方法,SLIC有更好的边界划分能力。在SLIC算法基础之上,结合光谱⁃空间相似性,将高光谱图像按空间地物类别划分同质区域,可以获得更精确的同质区域划分。对于一个空间尺寸为M1×M2,波段数为M3的高光谱图像,将其在空间平面上初始划分为K个六边形网格,即设置超像素初始形状为六边形,这与SLIC的矩形初始划分方式不同,其目的是使得超像素分割结果有类似于六连接的特性,便于后续超像素合并的连通域处理。此时,两个相邻六边形中心点之间的距离为
定义k个聚类中心为

式中(wk,hk)和vk分别为第k个聚类中心的空间坐标和光谱特征向量。为了充分利用光谱信息,选择光谱信息散度和光谱角结合作为光谱相似性度量,其表达式为

式中:dv(i,k)表示像素点i到聚类中心Ck的光谱距离;SID和SAM分别表示光谱信息散度和光谱角,将这两个度量结合起来可以提高光谱之间的区分能力。对于空间相似性,定义为像素点与聚类中心之间坐标的欧氏距离为

式中参数λ用于调节空间距离与光谱距离,其值越大,超像素越紧凑。基于所提出的光谱⁃空间距离,采用K⁃means聚类算法将每个像素分配给最近的聚类中心。对于每个聚类中心,SLIC只需要搜索其2S×2S范围内像素点即可,这极大地减少了迭代时间。
2.2 噪声标准差估计
将图像划分为多个同质区域后,每个同质区域内可认为是由同一类型的地物组成。高光谱图像光谱分辨率高,相邻波段之间有较强的光谱相关性,故波段k可以用波段k-1和k+1线性表示。在同质区域内,各像素点相邻波段之间有相似的线性关系。因此,在每个同质区域内可借助多元线性回归模型对波段k中像素点进行估计,通过将真实值与估计值作差,得到波段k的残差图。而噪声数据不具有相关性,去相关后的残差图可近似为噪声,利用所得残差图的标准差即可估计频带噪声。

式中n-3表示在多元线性回归模型中使用了3个参数,自由度从n降到n-3。在得到的所有标准差中,由于其统计特性,部分标准差会过高或过低,在统计曲线尾部形成拖尾。在实践中将所有标准差排序,剔除排序前后15%的拖尾数据,取剩下的标准差均值作为最佳噪声估计。
实验与结果分析
为验证本文算法的有效性,分别在模拟高光谱图像和真实高光谱图像上进行实验,并选取LMLSD、小波法、SSDC作为对比。为了方便比较,本文使用的所有图像大小均为256像素×256像素。
3.1 模拟实验
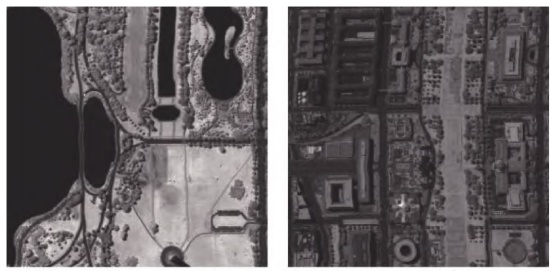
在模拟实验中,选用WashingtonDC图像作为实验对象。它是由高光谱数字图像采集试验仪HYDICE拍摄,其空间尺寸为1280像素×307像素,包含210个波段,波长范围为400~2400nm,去除水吸收波段(900~1400nm)后,剩余191个无噪的参考波段。为验证算法适用于不同复杂程度的图像,截取WashingtonDC图像中2个子区域,如图1所示。其中图1(a)地物以水体、均匀路面为主,图像纹理较少,而图1(b)以房屋、草丛为主,地物复杂,图像纹理丰富。分别为参考图像每个波段加入零均值的高斯噪声,其标准差随机选取2~30之间。
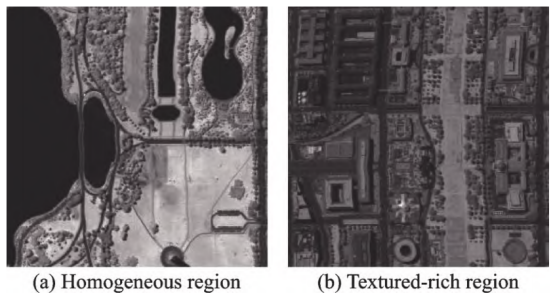
图1 WashingtonDC图像(第100波段)
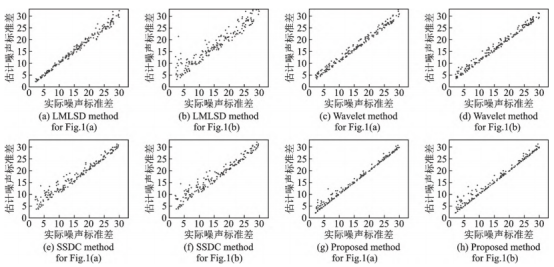
图2 WashingtonDC图像噪声水平估计
噪声估计结果如图2所示,将真实噪声标准差作为横坐标,估计噪声标准差作为纵坐标,数据点越集中于直线y=x,估计结果越准确。
为进一步研究算法的可靠性,将本文算法与同样基于多元线性回归去相关的SSDC算法相比较。图3给出了SSDC算法和本文算法所得残差图。
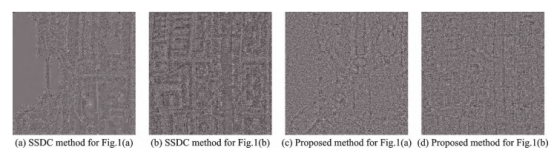
图3 WashingtonDC图像残差图(第81波段)
3.2 真实数据实验
在真实数据实验部分,选取由HYDICE传感器获取的Urban数据集,其空间尺寸为307像素×307像素,包含210个波段,波长范围为400~2500nm。截取第100~210波段范围,覆盖1400~2500nm区间。为了验证算法在不同复杂程度图像中的稳定性,截取Urban图像中2个子区域,如图5所示。在图5(a)所示区域中,图像纹理较少,而图5(b)所示图像纹理丰富。
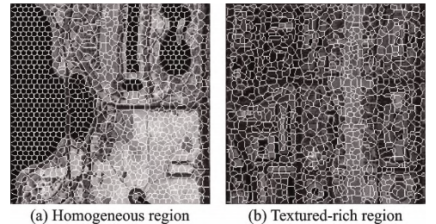
图4 WashingtonDC图像超像素分割结果
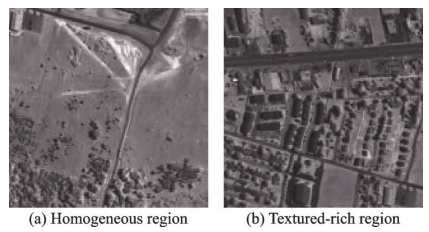
图5 Urban图像(第100波段)
在本实验中,选取SSDC算法作为对比方法,得到如图6所示结果。这2幅子图截取于同一幅图像,因此它们的噪声水平应相同,即在图6中对图5(a)和图5(b)两幅子图的噪声估计结果曲线应一致。但是,SSDC在某些波段范围对两幅子图的噪声估计出现了不一致的结果,这主要是由于不同地物在这些波段范围有着不同的光谱相关性。而在本文方法中,这些现象并未出现,因此相较于SSDC,本文方法不易受多种复杂地物场景的影响,能获得更稳定的噪声估计结果。
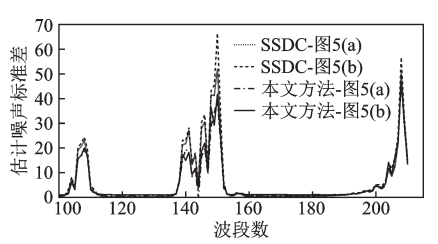
图6 Urban图像噪声水平估计
结束语
在高光谱图像噪声估计中,容易受到输入噪声以及地物复杂程度的影响,对噪声的估计稳定性较差。本文利用高光谱图像波段间的强相关性,结合多元线性回归去相关以及超像素分割,构造了一种超像素分割的高光谱图像噪声估计方法。不同于SSDC方法,本文方法在划分的同质区域内去除光谱相关性,因此对空间特征的敏感性较低。在模拟实验中,由SSDC计算的噪声估计值平均误差为1.9265和2.1810,而由本文算法所获得的噪声估计值平均误差为0.5108和0.7289,分别下降了75.39%和66.58%。通过模拟实验和真实数据实验,表明本文方法在处理不同噪声水平和不同地物复杂度的图像时,相较于其他方法,具有更精确的估计结果以及更好的稳定性,从而实现对高光谱图像各波段质量的准确评价,精确识别出被噪声淹没的波段并予以剔除,提高后续分类、识别、降维等工作的精度。随着高光谱成像设备的发展,已经证实在高光谱图像中也可能存在不可忽略的乘性噪声,研究对其准确估计的方法,将是下一步工作重点。
推荐:
便携式地物光谱仪iSpecField-NIR/WNIR
专门用于野外遥感测量、土壤环境、矿物地质勘探等领域的最新明星产品,由于其操作灵活、便携方便、光谱测试速度快、光谱数据准确是一款真正意义上便携式地物光谱仪。

无人机机载高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机机载高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。

审核编辑 黄宇
-
图像采集实例分析——基于LabVIEW的光谱数据采集2019-07-06 0
-
高光谱图像飞机目标检测研究2011-10-10 913
-
一种高光谱图像分布式压缩感知重构方法2013-08-14 702
-
基于图像融合的高光谱异常检测2017-11-08 1161
-
高光谱图像压缩算法2017-11-30 964
-
自适应噪声估计特性的字典学习去噪算法2017-12-08 903
-
基于空谱联合特征的高光谱图像分类方法2021-05-28 848
-
高光谱成像仪是如何成像的应用场景都有哪些2021-11-09 1682
-
什么是高光谱成像技术?2021-12-21 2716
-
如何解决高光谱图像分类面临的挑战2022-06-29 1526
-
高光谱遥感图像波段选择研究-莱森光学2022-11-30 2016
-
如何计算噪声的功率谱密度?2023-09-19 8041
-
高光谱图像混合像元分解2023-10-10 1012
-
基于特征谱带的高光谱遥感矿物谱系识别2023-10-13 899
-
高光谱成像系统:高光谱遥感图像的光谱混合模型2024-07-10 754
全部0条评论

快来发表一下你的评论吧 !
