

如何学习相机模型与标定?
描述
相机标定可以说是计算机视觉方向的基石。我们常见的许多计算机视觉任务,比如图像畸变校正,三维重建和立体视觉,获取相机参数,是这些工作绕不开的第一步。如何准确有效的获取相机参数就变得尤为重要,相机参数的准确性会严重影响到后续工作的进展。也正因此,相机标定几乎是计算机视觉岗位面试的标配。
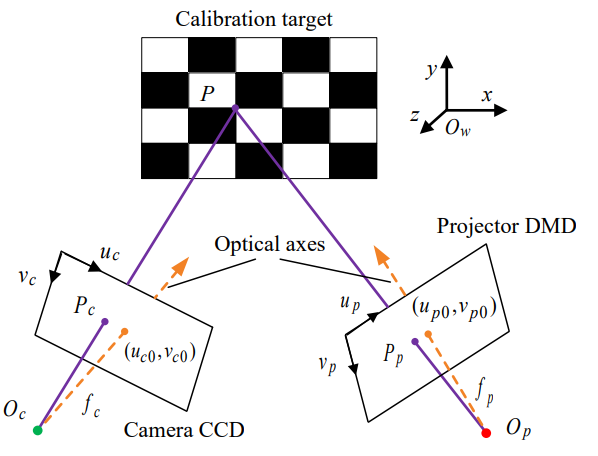
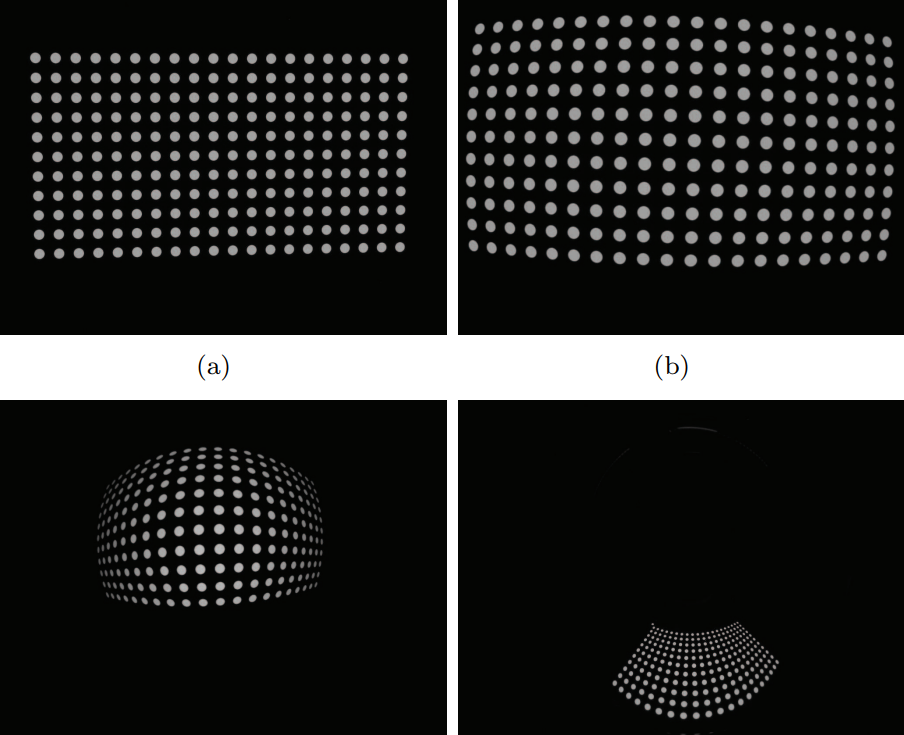
相机标定是通过输入带有标定patter的标定板来获得相机参数的一个过程。实际的光学成像是一套非常复杂的过程,从三维世界投影到相机中的二维图像。相机标定就是用抽象的数学模型来表示这个复杂的成像过程。从每年顶会发表论文的方向来看,3D视觉占得比重越来越大,如何从三维世界中获取有效信息,以及构建三维世界变得尤为重要。立体视觉,结构光,ToF是目前业内最常用,也是性能最好的三种方法。3D相机几乎已经是手机的标配,刷脸支付也已经完全渗透进入我们的生活中。

如何快速从入门到精通
然而相机标定虽然基础,但是知识点比较凌乱,而且具体的数学推导比较复杂,对于学习者的数学能力要求比较高。目前网上几乎没有,系统讲解多种相机标定的课程还比较少,尤其是详细的数学推导。很多同学能够实现简单的相机标定demo,但是背后的数学推导以及trick并不清晰。在实际的产业应用中需要对一个算法足够了解才可以。这也是3D视觉工坊推出这门课程的原因,通过这门课程,系统、完整的了解相机标定。
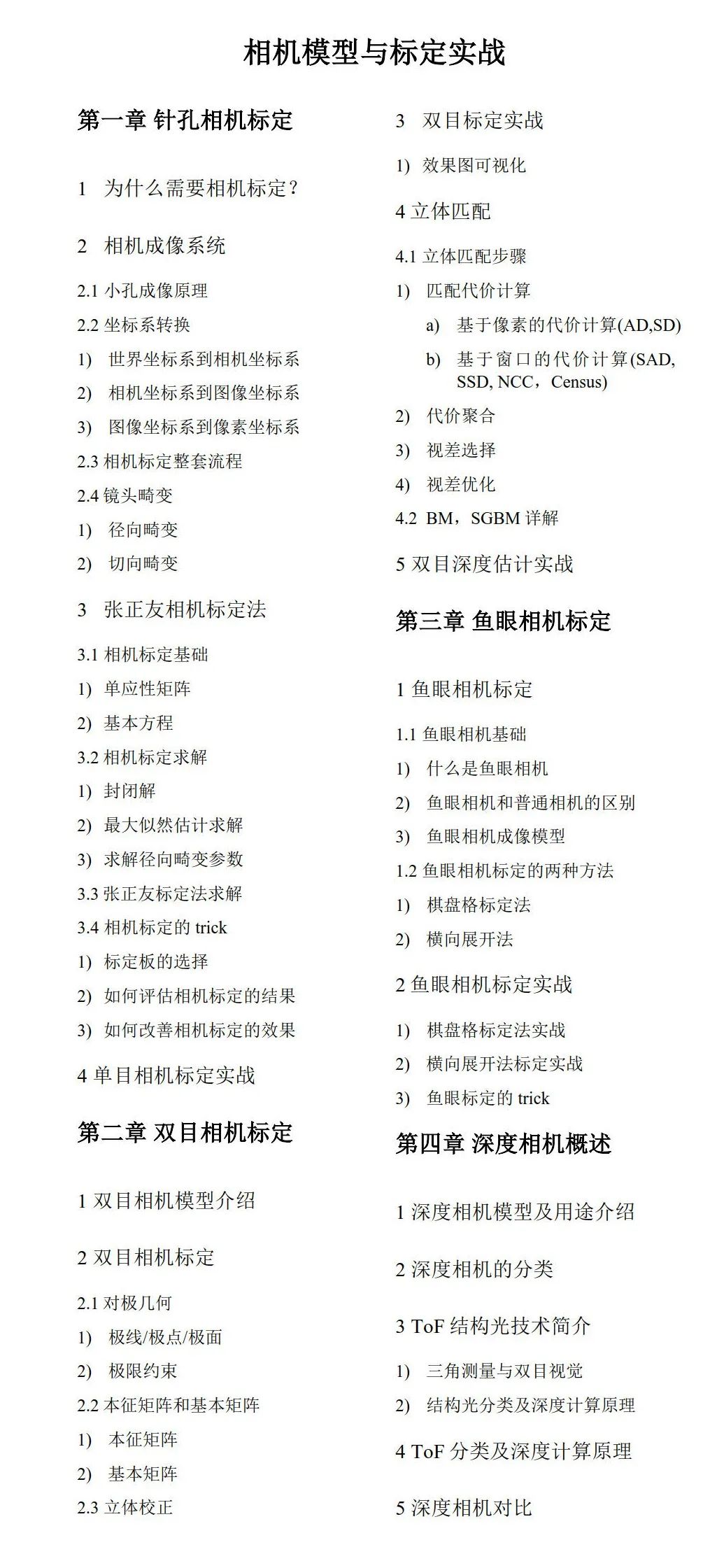
本课程主要包含两部分,分别是相机标定和3D视觉,相机标定包含单目,双目,以及鱼眼相机标定,3D视觉包含立体视觉,结构光和ToF,以立体视觉为主,课程将提供所有教学数据和源码。课程大纲如下所示:
讲师介绍
韦恩,研究生毕业于国内某985,曾在小米、平安等多个公司担任算法工程师,有丰富的计算机视觉算法工作经验,入选创新工场举办的AIChallenger项目。
课程亮点
1.包含单目、双目、鱼眼多种相机标定,足够详细; 2.深入浅出,循序渐进,从简单的小孔成像出发,到复杂的数学推导求解相机参数,理论推导详细完整。 3.理论和实践相结合,每一章都包含详细的project,授课结束后,讲师与同学们继续进行问题答疑与交流。 4.真正的了解业内常见的关于相机标定的问题,实现从简单的了解到工业落地的跨越。
学后收获
1.对单目,双目,鱼眼相机标定的理论推导有深入的理解,掌握相机标定的流程与常见问题的解决办法; 2.熟悉3D视觉获取深度的常见方法,包括立体视觉,结构光,ToF; 3.从极线约束到立体匹配,再到深度计算,掌握立体视觉求解深度的完整流程;
审核编辑 :李倩
-
CALIBRATION相机标定模块2015-12-10 775
-
#硬声创作季 相机标定任务概述 哥伦比亚大学相机模型与标定系列课程(1)Mr_haohao 2022-10-12
-
#硬声创作季 相机标定算法详解 哥伦比亚大学相机模型与标定系列课程(3)Mr_haohao 2022-10-12
-
#硬声创作季 相机的内参和外参矩阵 哥伦比亚大学相机模型与标定系列课程(4)Mr_haohao 2022-10-12
-
摄相机标定介绍2016-09-22 683
-
opencv相机标定原理与步骤2017-12-04 18362
-
相机标定的逻辑和学习资料详细概述2019-06-01 4332
-
HALCON的3D相机标定2020-10-31 4018
-
基于散焦模糊量估计的相机加权标定方法2021-04-21 585
-
基于除法畸变模型的镜头线性标定方法2021-05-19 959
-
相机标定含义(解决什么是相机标定)2022-06-21 8401
-
基于主动视觉的相机标定法知识整理2022-10-12 2763
-
相机标定为什么能够达到小于0.01像素误差的精度?2022-11-22 5108
-
基于圆形标定点的相机几何参数的标定2022-12-21 1434
-
相机标定究竟在标定什么?2023-10-18 993
全部0条评论

快来发表一下你的评论吧 !
