

 ubuntu下编程——杰发科技AC7802x串口控制LED灯
ubuntu下编程——杰发科技AC7802x串口控制LED灯
描述
ubuntu20.04+vscode下对杰发科技的AC7802x Cortex-M0+进行编程、编译、下载等。
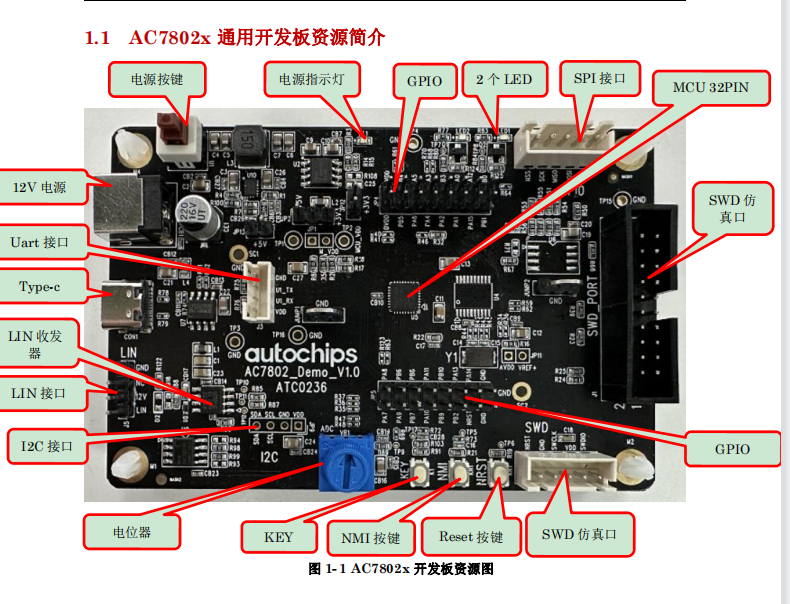
开发板
开发板为杰发科技的AC780x,板载的主控芯片为AC78022,32PIN。内核为Cortex-M0+。
流程图

控制部分的原理图
1、本次实验选用LED1来实现灯的开与关。原理图如下:


从原理图上看,LED1控制IO接到PA2,高电平制三极管导通,LED1亮,反之则关断。
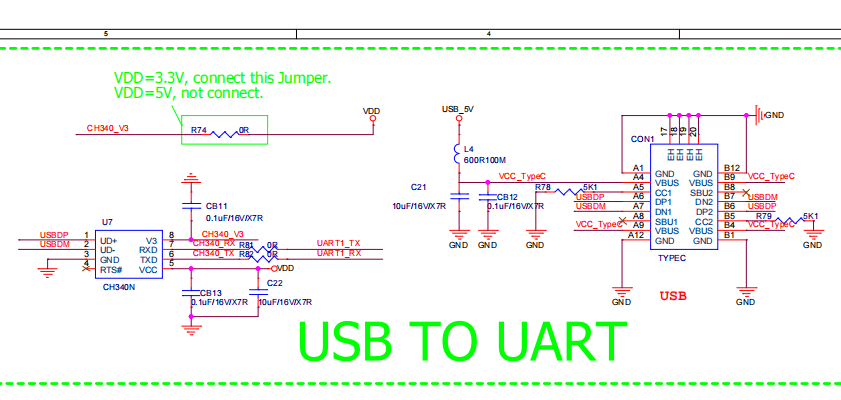
串口选择
从开发板原理图上,uart1接到了ch340,并配备了typc接口,本次实验选用uart1为实验串口。
实验步聚
-
拷贝一份模版到AC7802_UART。并用vscode打开。
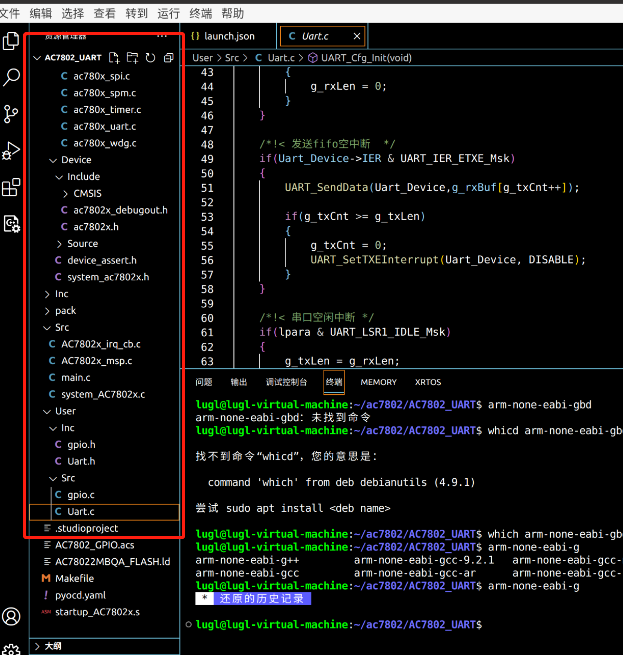
-
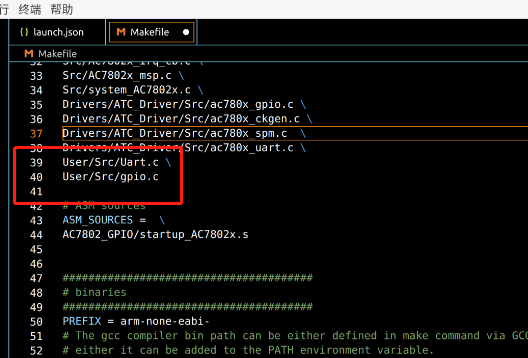
在User/Src下新建Uart.c,gpio.c,在Inc目录下新建Uart.h、gpio.h,并把Uart.c、gpio.c加入到makefile的source中
-
编写gpio.h 以及 gpio.c的Led初始化代码:


#ifndef _GPIO_H__
#define _GPIO_H__
#include "ac780x_gpio.h"
#define LED1_PORT (GPIOA)
#define LED1_PIN (GPIO_PIN2)
/*LED1动作定义.*/
#define LED1_ON do{GPIO_SetPinLevel(LED1_PORT, LED1_PIN, GPIO_LEVEL_HIGH);}while(0)
#define LED1_OFF do{GPIO_SetPinLevel(LED1_PORT, LED1_PIN, GPIO_LEVEL_LOW);}while(0)
#define LED1_TOGGLE do{if(GPIO_GetPinLevel(LED1_PORT, LED1_PIN)){LED1_OFF;}else{LED1_ON;}}while(0)
void GPIO_LedInit(void);
#endif
gpio.c
#include "gpio.h"
#include "stdbool.h"
void GPIO_LedInit(void)
{
/*初始化引脚功能,如果引脚上电后默认为GPIO,可省略掉初始化步骤.
有部分引脚上电默认为非GPIO,则必须选择其功能为GPIO才能作为GPIO使用.*/
GPIO_SetFunc(LED1_PORT, LED1_PIN, GPIO_FUN0);/*! 功能复用选择.*/
/*! 设置LED引脚为GPIO输出.*/
GPIO_SetDir(LED1_PORT, LED1_PIN, GPIO_OUT);
LED1_ON;
}
- 编写uart.h、usrt.c内容如下:
#ifndef __UART_H__
#define __UART_H__
#include "ac780x_uart.h"
void UART_Cfg_Init(void);
#endif
uart.c
/* =========================================== Includes =========================================== */
#include < stdbool.h >
#include "ac780x_gpio.h"
#include "ac780x_uart_reg.h"
#include "Uart.h"
/* ============================================ Define ============================================ */
#define RX_BUF_LEN 100U
/* =========================================== Typedef ============================================ */
/* ========================================== Variables =========================================== */
uint8_t g_rxLen = 0; /*!< 串口接收长度变量 */
uint8_t g_txLen = 0; /*!< 串口发送长度变量 */
uint8_t g_txCnt = 0;
uint8_t g_rxBuf[RX_BUF_LEN] = {0}; /*!< 串口接收数组 */
uint8_t g_rec_state = 0;
/* ==================================== Functions declaration ===================================== */
/* ====================================== Functions define ======================================== */
/*!
* @brief 串口回调函数
*
* @param void *device:UART_Type pointer
uint32_t wpara:UART lsr0 register
uint32_t lpara:UART lsr1 register
* @return none
*/
void UART_Callback(void *device, uint32_t wpara, uint32_t lpara)
{
UART_Type *Uart_Device = (UART_Type *)device;
/*! 串口接收中断 */
if(wpara & UART_LSR0_DR_Msk)
{
g_rxBuf[g_rxLen++] = UART_ReceiveData(Uart_Device);
if(g_rxLen > RX_BUF_LEN)
{
g_rxLen = 0;
}
}
/*!< 发送fifo空中断 */
if(Uart_Device- >IER & UART_IER_ETXE_Msk)
{
UART_SendData(Uart_Device,g_rxBuf[g_txCnt++]);
if(g_txCnt >= g_txLen)
{
g_txCnt = 0;
UART_SetTXEInterrupt(Uart_Device, DISABLE);
}
}
/*!< 串口空闲中断 */
if(lpara & UART_LSR1_IDLE_Msk)
{
g_rec_state = 1;
//UART_SetTXEInterrupt(Uart_Device, ENABLE);
}
}
/*!
* @brief uart configuration init
*
* @param none
* @return none
*/
void UART_Cfg_Init(void)
{
UART_ConfigType uart_config;
GPIO_SetFunc(GPIOA, GPIO_PIN4, GPIO_FUN3); /*! uart tx */
GPIO_SetFunc(GPIOA, GPIO_PIN5, GPIO_FUN3); /*! uart rx */
uart_config.baudrate = 115200; /*! 波特率115200 */
uart_config.dataBits = UART_WORD_LEN_8BIT; /*! 数据8bit */
uart_config.stopBits = UART_STOP_1BIT; /*! 停止位1bit */
uart_config.fifoByteEn = DISABLE;
uart_config.sampleCnt = UART_SMP_CNT0; /*! 16倍采样 */
uart_config.callBack = UART_Callback; /*! 回调函数设置 */
UART_Init(UART1,&uart_config); /*! 串口初始化 */
UART_SetRXNEInterrupt(UART1, ENABLE); /*! 串口接收中断使能 */
UART_SetIdleFuncEn(UART1, ENABLE);
UART_SetIdleInterrupt(UART1, ENABLE); /*! 使能串口空闲中断 */
NVIC_SetPriority(UART1_IRQn, 3); /*! 串口中断优先级 */
NVIC_ClearPendingIRQ(UART1_IRQn);
NVIC_EnableIRQ(UART1_IRQn);
}