

 RK3588-CAN总线
RK3588-CAN总线
电子说
1.3w人已加入
描述
1. 简介
ArmSoM-W3 RK3588 开发板中已集成AN总线:
- 专栏总目录
- CAN (controller Area Network)
- CAN BUS:控制器局域网络总线
- 目前世界上绝大多数汽车制造厂商都采用CAN总线来实现汽车内部控制系统之间的数据通信。
- RK3568/RK3588的CAN驱动文件:drivers/net/can/rockchip/rockchip_canfd.c
2. 内核配置
- rockchip_linux_defconfig配置:
CONFIG_CAN=y
CONFIG_CAN_DEV=y
CONFIG_CAN_ROCKCHIP=y
CONFIG_CANFD_ROCKCHIP=y
- 内核配置:
cd kernel
make ARCH=arm64 menuconfig
make savedefconfig
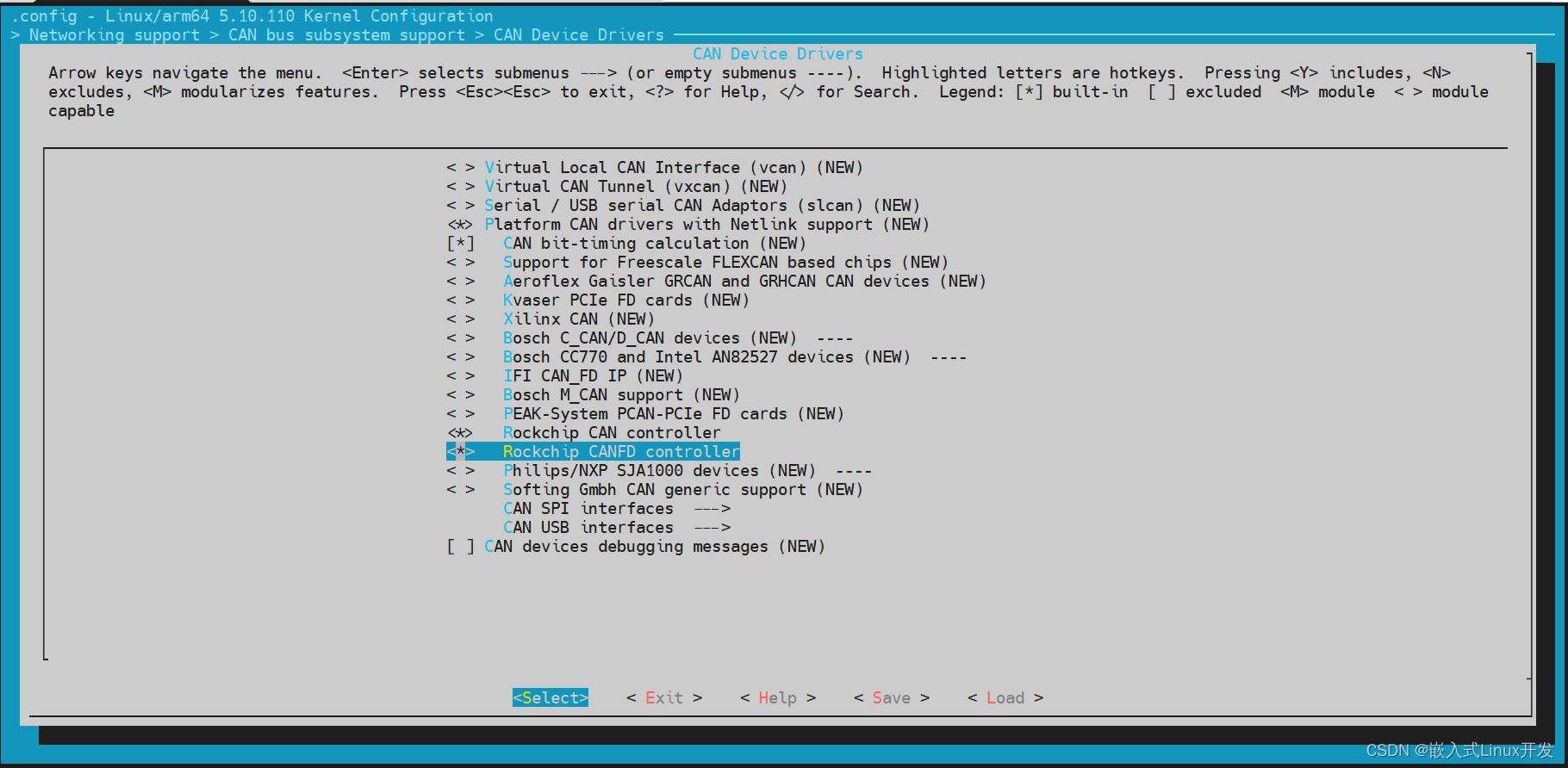
- 选择:Networking support ---> CAN bus subsystem support ( )--->CAN Device Drivers( ) ---> Platform CAN drivers with Netlink support(*)
3. DTS 节点配置
3.1 主要参数:
-
interrupts = ;
转换完成,产生中断信号。
-
clock
时钟属性,用于驱动开关clk,reset属性,用于每次复位总线。
-
pinctrl
3.2 公共配置 kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588s.dtsi
can1: can@fea60000 {
compatible = "rockchip,can-2.0";
reg = < 0x0 0xfea60000 0x0 0x1000 >;
interrupts = < GIC_SPI 342 IRQ_TYPE_LEVEL_HIGH >;
clocks = < &cru CLK_CAN1 >, < &cru PCLK_CAN1 >;
clock-names = "baudclk", "apb_pclk";
resets = < &cru SRST_CAN1 >, < &cru SRST_P_CAN1 >;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = < &can1m0_pins >;
tx-fifo-depth = < 1 >;
rx-fifo-depth = < 6 >;
status = "disabled";
};
- compatible = “rockchip,can-1.0” ,rockchip,can-1.0用来匹配can控制器驱动。
- compatible = “rockchip,can-2.0” ,rockchip,can-2.0用来匹配canfd控制器驱动。
- assigned-clock-rates用来配置can的始终频率,如果CAN的比特率低于等于3M建议修改CAN时钟到100M,信号更稳定。高于3M比特率的,时钟设置200M就可以。
- pinctrl配置:根据实际板卡连接情况配置can_h和can_l的iomux作为can功能使用。
3.3 板级配置 kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588-armsom-w3.dts
/* can1 */
&can1 {
status = "okay";
assigned-clocks = < &cru CLK_CAN1 >;
assigned-clock-rates = < 200000000 >;
pinctrl-names = "default";
pinctrl-0 = < &can1m1_pins >; //根据原理图配置
};
- 由于系统根据上述dts节点创建的CAN设备只有一个,而第一个创建的设备为CAN0
4. 调试
- 查询当前⽹络设备:
ifconfig -a - CAN启动
ip link set can0 down //关闭CAN ip link set can0 type can bitrate 500000 //设置⽐特率500KHz ip -details -statistics link show can0 //打印can0信息 ip link set can0 up //启动CAN - CAN发送
cansend can0 123#DEADBEEF //发送(标准帧,数据帧,ID:123,date:DEADBEEF) cansend can0 123#R //发送(标准帧,远程帧,ID:123) cansend can0 00000123#12345678 //发送(扩展帧,数据帧,ID:00000123,date:DEADBEEF) cansend can0 00000123#R //发送(扩展帧,远程帧,ID:00000123) - CAN接收
candump can0 //candump can0
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
RK3588 PCB推荐叠层及阻抗设计2023-08-10 953
-
RK3588与3588s的区别2023-08-15 23444
-
rk3588是armv8吗?rk3588硬件资料2023-08-21 3654
-
RK3588J和RK3588是什么关系?2023-03-13 0
-
RK3588和RK3588S之间的区别是什么2022-03-10 27034
-
RK3588芯片参数介绍 RK3588芯片的八大应用方向2022-08-26 11736
-
瑞芯微RK3588开发板RK3588 EVB和RK3588S EVB解读2022-09-22 17646
-
RK3588-MIPI屏幕调试笔记:RK3588-MIPI-DSI2023-06-10 4001
-
RK3588-MIPI屏幕调试笔记:RK3588-MIPI-DSI之屏参配置2023-06-10 2290
-
【LGA封装RK3588核心板】基于RK3588,小而强大的ArmSom-W3 CORE BOARD2023-07-03 1932
-
rk3588和rk3588s的区别2023-08-15 14422
-
RK3588系列有多少型号?2023-08-15 3434
-
rk3588参数详解 rk3588芯片参数2023-08-21 36026
-
迅为电子RK3588S与RK3588硬件性能区别及板卡选型2024-06-25 3331
-
RK3588!黑神话悟空,启动?-迅为电子RK3588开发板2024-08-30 626
全部0条评论

快来发表一下你的评论吧 !
