

基于力电容式传感器的力传感与反馈系统助力微创手术机器人升级
MEMS/传感技术
描述
微创手术(Minimally invasive surgery)因其创伤小、疼痛轻、恢复快等特点而备受关注。然而,目前大多数微创手术机器人都缺乏力感知(force sense)的能力,从而存在较高的手术风险。准确的力传感单元、快速的信号处理和有效的操作主控器是有前途微创手术的力传感系统的重要组成部分。因此,高性能力传感器的构建是解决微创手术机器人力传感不足的关键因素。
据麦姆斯咨询报道,近日,苏州大学的科研团队在Advanced Sensor Research期刊发表了以“Force Sensing and Feedback System Based on Novel Triaxial Force Capacitive Sensor for Minimally Invasive Surgical Robot”为主题的论文。该论文第一作者为苏州大学机电工程学院Lu Zhang;通讯作者为王凤霞研究员和刘会聪教授,王凤霞研究员主要从事机器人智能感知系统、人-机交互界面和柔性传感系统方面的研究工作,刘会聪教授主要从事微纳感知、柔性传感、机器人智能安全交互以及可穿戴人机交互方面的研究工作。
这项研究工作提出了一种基于新型柔性三轴力电容式传感器的微创手术力传感与反馈系统,用于检测微创手术机器人的抓握力。该研究通过将柔性三轴力电容式传感器集成到微创手术机器人的末端执行器中,从而实现微创手术的力传感系统。该系统通过对仿生组织执行抓握、触碰等动作,来检测三轴力的大小以及抓握或触碰动作的实时位置。
该微创手术机器人主要由柔性三轴力电容式传感器、信号采集威廉希尔官方网站 、显示界面和操作主控手组成,如图1所示。柔性三轴力电容式传感器主要用于检测抓握或触碰组织时的力,以抓握器和接触杆为实验对象。在数据处理部分,结合采集数据与设定参数,采用函数拟合的方法直接输出力值。再与显示器相连接,三轴力可通过串行通信上传到PC端实现实时显示。最后,传感的力值可以提供给操作系统,以辅助操作并提高操作感知。
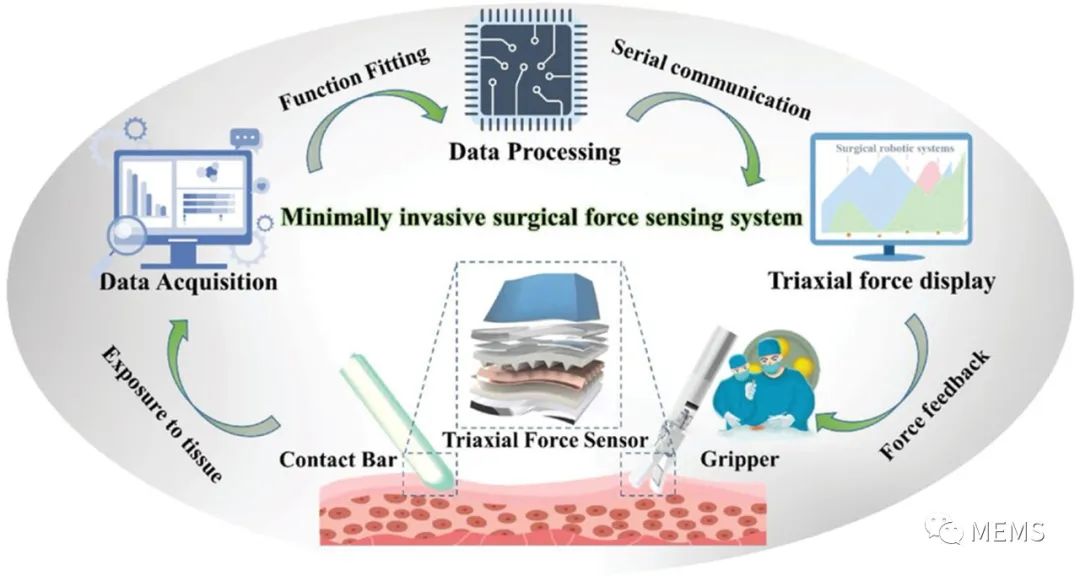
图1 微创手术力传感系统
该研究工作采用柔性三轴力电容式传感器作为微创手术的力传感单元。典型的三轴力电容式传感器主要由四个传感器阵列组成。当在每个方向上对传感器施加三轴力时,四个传感器单元将根据对不同方向的力的不同电容值来识别和检测三轴力。该研究提出的新型柔性电容式压力传感器结构,解决了高灵敏度与宽压力检测范围之间的权衡问题:通过插入微结构电极来提高灵敏度,并通过正交使用微结构来增加压力检测范围。该器件制造工艺方案如图2所示。
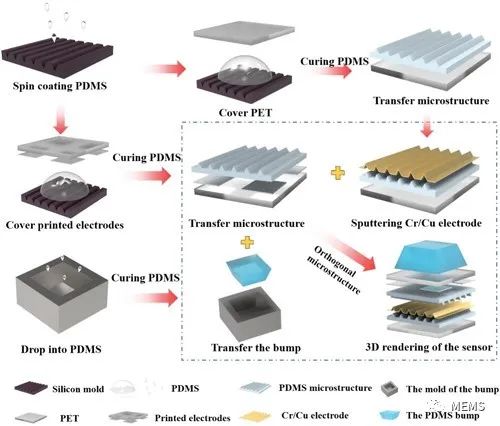
图2 柔性三轴力电容式传感器的制造工艺
该传感器主要由凸块、三角锥状聚二甲基硅氧烷(PDMS)微结构、磁控溅射三角锥状微结构电极、带有三角锥状PDMS微结构的印刷电极以及柔性聚对苯二甲酸乙二醇酯(PET)衬底组成。
该柔性三轴力电容式传感器由四个传感器单元构成。由于传感器单元是影响三轴力电容式传感器性能的关键因素,因此研究人员首先对每个传感器单元进行了研究,随后对柔性三轴力电容式传感器的性能进行了研究,结果如图3所示。结果表明,该柔性三轴力电容式传感器具有良好的动态稳定性、微弱压力的传感能力和出色的柔性。该传感器所具有的良好动态响应和优异稳定性,显示出其在微创手术中的广阔应用前景。图4为该柔性三轴力电容式传感器的结构和性能示意图。
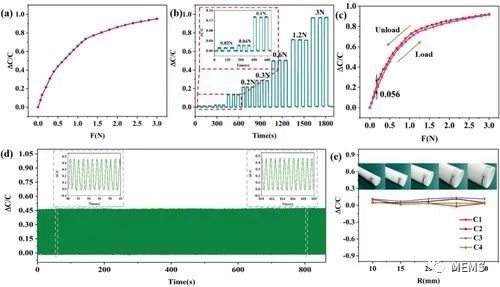
图3 柔性三轴力电容式传感器的性能
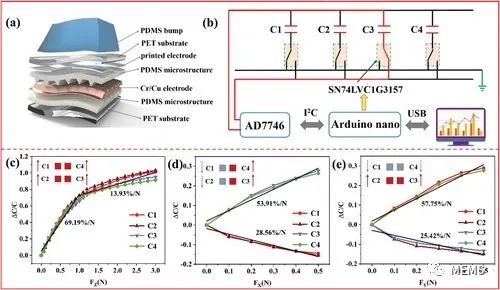
图4 柔性三轴力传感器的结构和性能示意图:(a)柔性三轴力电容式传感器的结构;(b)信号采集威廉希尔官方网站
;(c-e)传感器的三轴力校准
为探究在微创手术过程中该三轴力传感器如何检测触碰组织的力,将三轴力传感器集成到微创机器人末端执行器的抓握器和接触杆中。实验结果验证了该三轴力传感器在抓握仿生组织时可实时检测三轴力的大小,为在微创手术中的实际操作提供了可能。
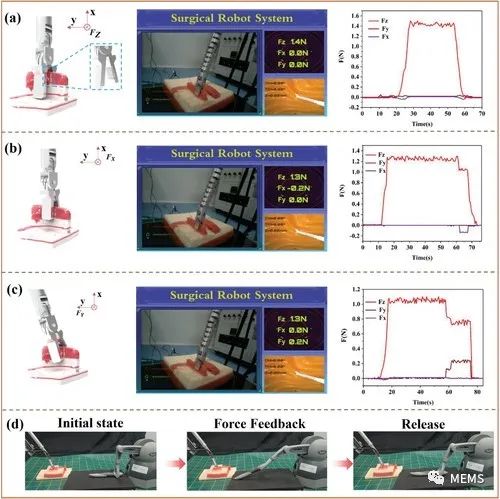
图5 抓握仿生组织的实时三轴力
凭借其优异的柔性,该三轴力传感器可以被集成到弯曲的接触杆中,以检测触碰模拟仿生组织时的接触力。这些动作可以模拟微创手术中接触杆在触碰仿生组织表面时的三轴力大小,结果如图6所示。
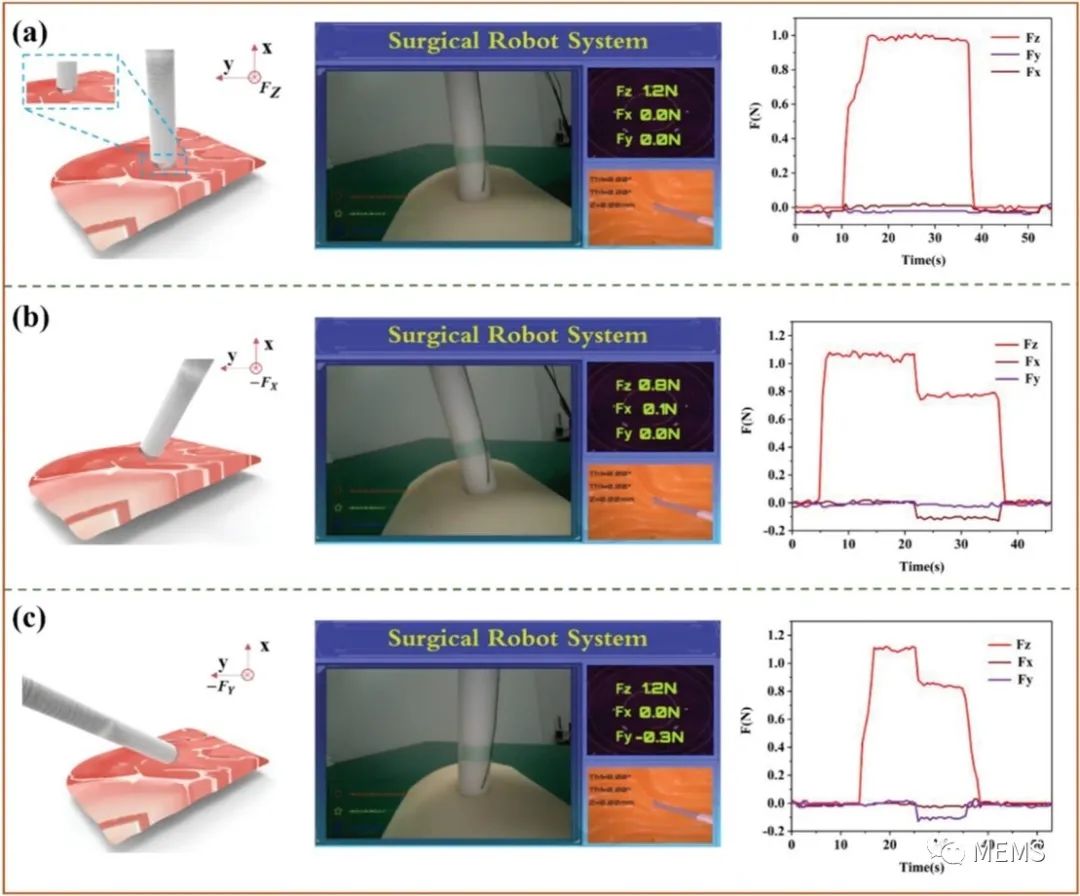
图6 触碰仿生组织的实时三轴力
综上所述,这项研究提出了基于新型柔性三轴力电容式传感器的微创手术机器人的力传感与反馈系统。该电容式力传感器主要由三角锥状微结构电极和正交三角锥状微结构绝缘层组成,解决了高灵敏度与宽检测范围之间的权衡问题,法向力的检测范围为0-3 N,灵敏度高达69.19% N⁻¹。将三轴力电容式传感器集成到微创手术机器人的末端执行器中,从而实现微创手术的力传感系统。该系统可以在显示界面实时显示抓握或触碰动作的位置以及三轴力的大小。更重要在于,传感的力值可以进一步控制夹具的运动,从而实现该新型力传感与反馈系统。该基于柔性三轴力电容式传感器的新型微创手术的力传感系统为其在微创手术中的应用奠定了基础。
审核编辑:刘清
-
智能机器人对于传感器的需求2015-01-20 0
-
电容式传感器的选用2017-12-13 0
-
机器人传感器2018-01-03 0
-
基于闭环MEMS的电容式惯性传感器设计2018-11-06 0
-
盘点工业机器人常见的六种传感器类型2018-11-08 0
-
机器人传感器的类别和应用原理2018-11-08 0
-
五招教你如何正确选择工业机器人力矩传感器2018-12-07 0
-
力传感器精密度的提高及力传感器运用2020-07-01 0
-
多维力传感器被广泛应用2020-08-05 0
-
机器人传感器应用2021-09-16 0
-
如何去实现一种基于传感器的机器人手术系统设计2021-09-28 0
-
微力 FMA 传感器的医学应用2022-04-15 0
-
ROBOTOUS电容式六维力传感器2023-04-13 0
-
电容式力传感器的研制2009-06-23 760
-
基于闭环的电容式传感器的工作原理和设计方法2019-08-30 1512
全部0条评论

快来发表一下你的评论吧 !
