

西门子S7-200 SMART PLC如何实现PID自动/手动调节切换
电子说
描述
所谓手自动勿扰S7-200 SMART PLC切换,是指在将PID回路从手动模式切换到自动模式,或者是自动模式切换的手动模式时,PID输出不会发生跳变,也就是不会产生任何波动。本文阐述内容主要以中的PID功能为实例。
一、PID 自动/手动调节的无扰动切换
有些工程项目中可能需要根据工艺要求在不同的时刻投入、或者退出 PID 自动控制;退出 PID 自动控制时,控制器的输出部分可以由操作人员直接手动控制。这就是所谓的 PID 手动/自动切换。
PID 控制处于自动方式时,PID 控制器(以S7-200 SMART 中的 PID 调节为例)会按照 PID 算法,自动通过输出的作用使过程反馈值跟随给定值变化,并保持稳定。这是一个自动的闭环控制系统。操作人员可以根据现场工艺的要求,改变给定(即设定值)的值。
PID 控制处于手动方式时,PID 控制器不再起自动计算的作用。这时,控制回路的输出是由操作人员手动控制、调整,由操作人员观察现场的控制效果,从而构成人工闭环控制。
所谓 PID 自动/手动控制,就是看控制系统的输出是由 PID 控制器自动控制,还是由操作人员手动控制。
有些控制系统的执行机构不能承受较大的冲击,这就要求在进行 PID 自动/手动切换时,保持控制输出的稳定。这就是要求无扰动切换。为了达到 PID 自动/手动控制的无扰动切换,需要在编程时注意一些相关事项。下面分别就直接使用 PID 指令编程,和使用 PID 向导编程两种情况作一介绍。
二、直接使用 PID 指令编程时的 PID 自动/手动无扰切换
直接使用 PID 指令块编写 PID 控制程序时,可以简单地使用“调用/不调用”指令的方式控制自动/手动模式。因为 PID 指令本身已经具有实现无扰动切换的能力,此时在 PID 指令控制环节之外编程没有多大必要。
PID 指令的 EN 输入端使能(为“1”)时,我们认为是自动控制模式;EN 输入端未使能(为“0”)时,我们认为是手动控制模式。PID 指令本身有一个“能流历史状态位”,以记录指令的状态切换。在 EN 端从“0”变为”“1”时,PID 指令认为这是从“手动”模式向“自动”模式切换。PID 指令此时会自动执行一系列动作,以配合无扰动切换:
使设定值( SPn) = 当前过程反馈变量(PVn)
设置上次采样过程变量(PVn-1) = 当前过程反馈变量(PVn)
设置积分偏差和(或所谓积分前项)(Mx) = 当前输出值(Mn)
使设定值等于当前反馈值可以避免出现偏差,使之不存在调整的要求;当然如果有工艺要求,也可以后续调整设定值。其他的动作都是为了使 PID 在后续的操作中不改变输出的值。
在编程时要注意:
从自动模式向手动模式切换时,PID 指令的 EN 端不再有能流,计算停止,输出值 Mn 不再变化。此时如果需要操作人员人工观察控制的结果,手动控制输出量,就可以通过用户程序直接改变回路表中的输出值存储单元内容(见数据块或系统手册的相关部分内容)。如果有必要,操作人员的操作可能要进行一些标准化换算。
为保证从手动模式向自动模式的切换无扰动,需要在手动控制时,或在切换过程中,禁止对 PID 回路表中设定值的更新,以便切换时 PID 指令用当前过程反馈值替代设定值。切换完成后,操作人员可以调整设定值。
三、使用 PID 向导编程时的 PID 自动/手动无扰切换
使用 PID 指令向导编程时,指令向导会自动调用 PID 指令,并且编写外围的控制变量标准化换算、定时采样等功能。用户在使用 PID 指令向导时,需要在用户程序中用 SM0.0 调用指令向导生成的子程序(如 PIDx_CTRL 子程序)。PID 向导可以生成带自动/手动切换功能的子程序,这个子程序使用一个数字量点为“1”、“0”的状态来控制是否投入 PID 自动控制。
到目前为止(STEP 7-Micro/WIN SMART),使用 PID 向导生成的子程序时,由于用户程序不能直接使用 PID 指令,它的无扰切换能力因为隔了外壳子程序,所以受到了局限。如果对无扰切换要求比较严格,需要另外编一些程序加以处理。但在高级一点的PLC中,无扰动切换功能只需打个勾即可。对于SMART来说则不能这么简单了。
S7-200SMART中,考察如下 PID 控制子程序:
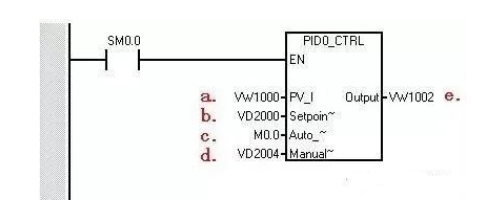
图 1. PID 向导生成的指令
图中:a、过程反馈量 ;b、设定值,实数 ;c、自动/手动控制,“1”=自动,“0”=手动 ;d、手动控制输出值,0.0 - 1.0 之间的一个实数;e、PID 控制输出值。
要实现无扰动切换,必须:
在从自动向手动切换时,使手动输出值(VD2004)等于当前的实际控制输出值;
在从手动向自动切换时,使设定值相当于当前的过程反馈值。
为此,可编写类似下图所示的程序,放在 PID 控制子程序之前:
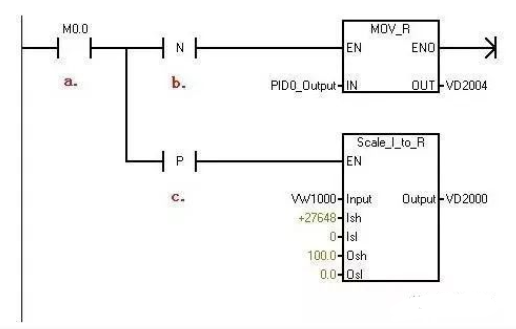
图 2. 无扰切换处理程序
图中:
a、自动/手动切换控制点 ;
b、从自动向手动切换时,使手动输出值等于实际当前值 ;
c、从手动向自动切换时,把当前反馈量换算为相应的给定值 。
审核编辑:汤梓红
-
S7协议读取西门子S7-200 Smart PLC数据2024-07-11 5758
-
S7-200西门子PLC视频教程大全2012-09-26 120079
-
西门子S7-200 PLC应用100例2013-09-17 2770
-
西门子S7-200使用教程2016-05-06 1823
-
西门子S7-200以太网通讯解决方案2017-01-16 16884
-
西门子PLC S7-200常见的71个故障汇总及解决办法2018-04-18 63021
-
西门子PLC S7-200smart程序下载错误分析2018-07-23 4685
-
西门子S7-200 PLC编程实例精解2021-04-22 4192
-
西门子PLC教案(S7-200)2021-04-29 2212
-
西门子S7-200高级应用2021-05-06 1166
-
Simatic S7-200 SMART PLC介绍2023-01-29 4563
-
西门子PLC S7-200 SMART PID控制功能分享2023-04-06 9628
-
西门子S7-200 SMART编程技巧2023-07-10 2391
-
PLC西门子S7-200smart和S7-1200的区别?2023-11-17 10251
-
西门子S7-200 Smart PLC加密设置全面指南2024-03-27 10819
全部0条评论

快来发表一下你的评论吧 !
