

深入了解角度传感器
描述
角度传感器的定义
角度传感器是指能感受被测角度并转换成可用输出信号的传感器。 角度传感器,顾名思义,是用来检测角度的。它的身体中有一个孔,可以配合乐高的轴。当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。


通过计算旋转的角度可以很容易的测出位置和速度。当在机器人身上连接上轮子(或通过齿轮传动来移动机器人)时,可以依据旋转的角度和轮子圆周数来推断机器人移动的距离。然后就可以把距离转换成速度,你也可以用它除以所用时间。
实际上,计算距离的基本方程式为: 距离=速度×时间
由此可以得到:速度=距离/时间
磁敏角度传感器
磁敏电阻角度传感器
磁敏感角度传感器采用高性能集成磁敏感元件,利用磁信号感应非接触的特点,配合微处理器进行智能化信号处理制成的新一代角度传感器。

特点:无触点、高灵敏度、接近无限转动寿命、无噪声、高重复性、高频响应特性好 。
优点:
1、磁钢位置未对准自动补偿;
2、故障检测功能;
3、非接触位置检测功能,是满足苛刻环境应用需求的理想选择。
应用领域:
1、工业机械、工程机械建筑设备、石化设备、医疗设备、航空航天仪器仪表、国防工业等旋转速度和角度的测量.
2、汽车电子脚踩油门角位移,方向盘位置,座椅位置,前大灯位置;
3、自动化机器人,运动控制,旋转电机转动和控制.
基于磁敏角度技术的拉线式位移传感器
传统的拉线式位移传感器采用电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。电位器式位移传感器的可动电刷与被测物体相连,物体的位移引起电位器移动端的电阻变化。阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。通常在电位器上通以电源电压,把电阻变化转换为电压输出。传统的拉线式位移传感器由于其电刷移动时电阻以匝电阻为阶梯变化,其输出特性亦呈阶梯形。如果这种位移传感器在伺服系统中用作位移反馈元件的时,则过大的阶跃电压会引起系统振荡。因此在电位器的制作中应尽量减小每匝的电阻值。同时,电位器式传感器的另一个主要缺点是易磨损、分辨力差、阻值偏低、高频特性差,从而导致测量精度的下降。它的优点是:结构简单,输出信号大,使用方便,价格低廉。
基于磁敏角度技术的拉线式位移传感器以磁场为传输载体,将位移变换转换为磁场角度位移,同时,通过通信接口将位移信号返回给应用系统。
基于磁敏角度技术的拉线式位移传感器的功能是将拉线的机械位移换成可以计量、记录或传送的电信号,主要由自动回复弹簧、轮毂、磁铁以及数据处理单元等部分构成,结构如图2所示。
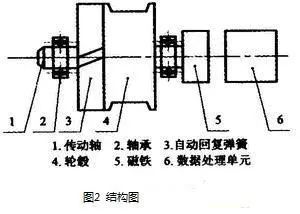
由图2可以看出,该基于磁敏角度技术的拉线式位移传感器主要由6部分组成,改变传统的拉线式位移传感器接触式、易磨损、高频特性差等缺点,基于磁敏角度技术的拉线式位移传感器以磁场为媒介,将机械位移变化转化为磁场角度变化,一方面解决传统拉线位移传感器的接触方式,另一方面减少了磨损、提高了系统高频特性,从而确保位移检测精度。数据处理运算器,用于对接收到的磁敏角度信号通过数学模型运算为拉线的位移信号。通信接口,通过通信接口与应用系统的设备进行通信,接收来自应用系统设备的命令并将采集到的位移信号反馈给应用系统。从而提高了数据采集精度、稳定性和可靠性,降低了位移传感器的应用门槛。
各个部件功能描述如下:
1、拉线的钢绳缠绕在轮毂上,轮毂与一个磁铁连接在一起,当拉线产生位移的时候,带动轮毂的转动,轮毂的转动造成与轮毂的轴连接的磁铁转动,从而磁铁的磁场产生一个变化的角度。拉线运动发生的时候,自动回复弹簧确保拉线具备一定的张力,确保拉线的位移与磁敏角度的比例关系。
2、磁敏角度感应器与磁铁安装在同一中心轴,用来感应磁铁角度的变化,选用一种微处理器,该处理器读取磁敏角度信息,并通过建立数学模型,将磁敏角度运算为拉线的位移。
3、通讯接口,微处理器通过通信接口接收来自应用系统的命令并将位移信息通过通信接口返回给应用系统。
硬件接口威廉希尔官方网站
数据处理单元由磁敏角度感应器、微处理器单元、通信接口以及输出模块,具体的功能框如图所示。
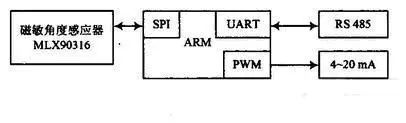
通过分析,磁敏角度感应器将拉线位移所导致的磁铁磁场转动的角度转换为磁敏角度。微处理器单元选用32位嵌入式ARM用于对接收到的磁敏角度数据进行处理,完成磁敏角度数据的接收,由于接收到的是磁场转换的角度,所以通过建立数学模型,结合轮毂的直径等因素,将磁敏角度换算为拉线的位移。
电容式角位移传感器
电容式角位移传感器用于测量固定部件(定子)与转动部件(转子)之间的旋转角度,因其具有结构简单,测量精度高,灵敏度高,适合动态测量等特点,而被广泛应用于工业自动控制。
一般来说,电容式角位移传感器由一组或若干组扇形固定极板和转动极板组成,为保证传感器的精度和灵敏度,同时避免因环境温度等因素的改变导致介电常数、极板形状等的间接变化,进而对传感器性能产生不利影响,对传感器的制作材料、加工工艺以及安装精度提出了较高要求,为了克服电容角位移传感器的局限性,国内外科学工作者进行了长期的大量研究工作,其主要思想方法是将传感器设计成差动结构。

传感器系统原理框图如图所示:
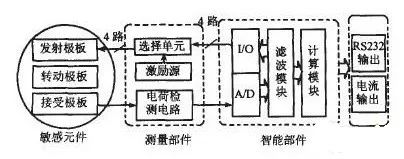
由敏感元件、测量威廉希尔官方网站 、智能部件与接口部件构成,敏感元件的结构所示如图1,测量部件由选择单元、激励源和电荷检测单元组成;智能部件由I/O单元、A/D单元、滤波单元、角度计算单元等组成;接口部件由电流输出单元、RS232通讯单元等组成。
敏感元件检测反映角度位置的电容值,是传感器的初始转换单元,测量单元采用了先进的抗杂散微小电容检测威廉希尔官方网站 ,将电容值转换为电信号,智能部件的主要功能是通过比例式算法计算出角位移量,最后由接口部件输出角度计算结果。
倾角传感器
倾角传感器经常用于系统的水平测量,从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器,倾角传感器还可以用来测量相对于水平面的倾角变化量。
倾角传感器基本原理
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。所以它其实是运用惯性原理的一种加速度传感器。
当倾角传感器静止时也就是侧面和垂直方向没有加速度作用,那么作用在它上面的只有重力加速度。重力垂直轴与加速度传感器灵敏轴之间的夹角就是倾斜角了。
随着MEMS 技术的发展,惯性传感器件在过去的几年中成为最成功,应用最广泛的微机电系统器件之一,而微加速度计就是惯性传感器件的杰出代表。作为最成熟的惯性传感器应用,现在的MEMS 加速度计有非常高的集成度,即传感系统与接口线路集成在一个芯片上。

倾角传感器把MCU,MEMS加速度计,模数转换威廉希尔官方网站 ,通讯单元全都集成在一块非常小的威廉希尔官方网站 板上面。可以直接输出角度等倾斜数据,让人们更方便的使用它。
其特点是: 硅微机械传感器测量(MEMS)以水平面为参面的双轴倾角变化。输出角度以水准面为参考,基准面可被再次校准。数据方式输出,接口形式包括RS232、RS485和可定制等多种方式。抗外界电磁干扰能力强。
倾角传感器的分类
“固体摆”式惯性器件
固体摆在设计中广泛采用力平衡式伺服系统,其由摆锤、摆线、支架组成, 摆锤受重力G和摆拉力T的作用,如应变式倾角传感器就基于此原理。
“液体摆”式惯性器件

液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等。当壳体水平时,电极插入导电液的深度相同。如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI和RIII。若液体摆水平时,则RI=RIII。当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII 减少,即RI>RIII。反之,若倾斜方向相反,则RI<RIII。
在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
“气体摆”式惯性器件
气体在受热时受到浮升力的作用,如同固体摆和液体摆也具有的敏感质量一样,热气流总是力图保持在铅垂方向上,因此也具有摆的特性。“气体摆”式惯性元件由密闭腔体、气体和热线组成。当腔体所在平面相对水平面倾斜或腔体受到加速度的作用时,热线的阻值发生变化,并且热线阻值的变化是角度q或加速度的函数,因而也具有摆的效应。其中热线阻值的变化是气体与热线之间的能量交换引起的。
“气体摆”式惯性器件的敏感机理基于密闭腔体中的能量传递,在密闭腔体中有气体和热线,热线是唯一的热源。当装置通电时,对气体加热。在热线能量交换中对流是主要形式。
固、液、气体摆性能比较
就基于固体摆、液体摆及气体摆原理研制的倾角传感器而言,它们各有所长。在重力场中,固体摆的敏感质量是摆锤质量,液体摆的敏感质量是电解液,而气体摆的敏感质量是气体。
气体是密封腔体内的唯一运动体,它的质量较小,在大冲击或高过载时产生的惯性力也很小,所以具有较强的抗振动或冲击能力。但气体运动控制较为复杂,影响其运动的因素较多,其精度无法达到军用武器系统的要求。
固体摆倾角传感器有明确的摆长和摆心,其机理基本上与加速度传感器相同。在实用中产品类型较多如电磁摆式,其产品测量范围、精度及抗过载能力较高,在武器系统中应用也较为广泛。
液体摆倾角传感器介于两者之间,但系统稳定,在高精度系统中,应用较为广泛,且国内外产品多为此类
角度传感器的选择标准
1、频率响应特性
角度传感器的频率响应特性决定了被测量的频率范围,必须在允许频率范围内保持不失真的测量条件,实际上传感器的响应总有—定延迟,希望延迟时间越短越好。
传感器的频率响应高,可测的信号频率范围就宽,而由于受到结构特性的影响,机械系统的惯性较大,因有频率低的传感器可测信号的频率较低。
在动态测量中,应根据信号的特点(稳态、瞬态、随机等)响应特性,以免产生过火的误差。
2、灵敏度的选择
通常,在角度传感器的线性范围内,希望角度传感器的灵敏度越高越好。因为只有灵敏度高时,与被测量变化对应的输出信号的值才比较大,有利于信号处理。但要注意的是,传感器的灵敏度高,与被测量无关的外界噪声也容易混入,也会被放大系统放大,影响测量精度。因此,要求传感器本身应具有较高的信噪比,尽员减少从外界引入的厂扰信号。
传感器的灵敏度是有方向性的。当被测量是单向量,而且对其方向性要求较高,则应选择其它方向灵敏度小的传感器;如果被测量是多维向量,则要求传感器的交叉灵敏度越小越好。
3、稳定性
传感器使用一段时间后,其性能保持不变化的能力称为稳定性。影响传感器长期稳定性的因素除传感器本身结构外,主要是传感器的使用环境。因此,要使传感器具有良好的稳定性,传感器必须要有较强的环境适应能力。
另外,在选择角度传感器之前,应对其使用环境进行调查,并根据具体的使用环境选择合适的传感器,或采取适当的措施,减小环境的影响。
4、线性范围
角度传感器的线形范围是指输出与输入成正比的范围。以理论上讲,在此范围内,灵敏度保持定值。传感器的线性范围越宽,则其量程越大,并且能保证一定的测量精度。在选择传感器时,当传感器的种类确定以后首先要看其量程是否满足要求。
但实际上,任何传感器都不能保证绝对的线性,其线性度也是相对的。当所要求测量精度比较低时,在一定的范围内,可将非线性误差较小的传感器近似看作线性的,这会给测量带来极大的方便。
角度传感器的好坏并非单一因素决定的。简单说来并不是越灵敏越好,或是越稳定越好。这些都是多方面的考虑。综合自身的要求去选择适合自己的传感器才是最好的。
研发销售6轴、9轴电子罗盘(陀螺仪|加速计|磁力计)、倾角传感器、姿态传感器,惯导、数据采集盒、IoT远程智慧监测等
产品广泛应用于:无人机、无人船、巡检/引导/送餐/水下机器人、AGV、云台装置、望远镜、Qiang支瞄准镜、雷达定位、聚光太阳能、工矿/隧道无人设备等!
核心研发人员十年技术积累,专业研发团队,军工级品质,替代进口。
-
角度传感器资料2013-08-31 0
-
深入了解示波器2013-11-14 0
-
角度传感器怎么使用。2014-07-19 0
-
深入了解LabVIEW FPGA资料分享2015-05-27 0
-
了解一下这个测量角度的位移传感器是怎么回事2022-02-16 0
-
角度传感器_什么是角度传感器2012-01-03 9955
-
深入了解示波器入门手册2013-03-27 1376
-
角度传感器怎么接线_角度传感器作用2019-07-17 13710
-
带你深入了解示波器2022-02-07 764
-
角度传感器详解2022-03-09 4477
-
深入了解安全光栅2023-06-25 1215
-
角度传感器的工作原理 角度传感器原理及应用2023-07-26 3638
-
深入了解传感器!《传感器原理及应用》2023-10-11 309
-
深入了解 GaN 技术2023-12-06 6158
-
深入了解六轴力传感器:原理、分类与应用2024-08-02 799
全部0条评论

快来发表一下你的评论吧 !
