

科聪:轻松应对多样和差异的需求,构建移动机器人如此简单
描述
构建移动机器人流程
满足各车型需求

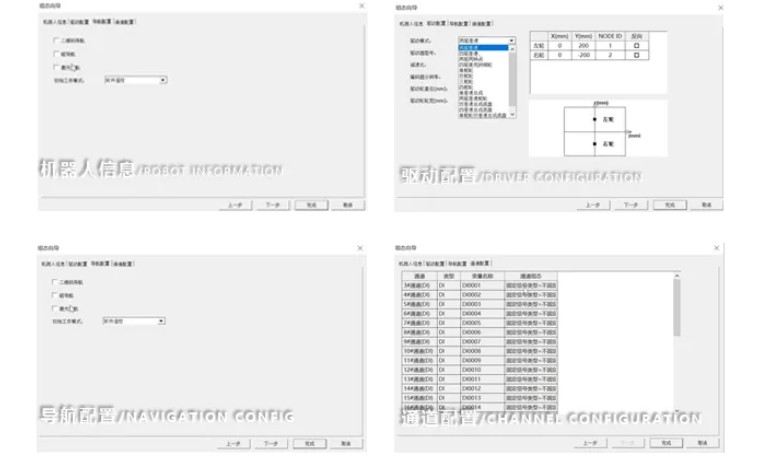
向导式设计
构建移动机器人
按照向导指引输入:机器人机械参数(长宽高等)、运动控制类型(底盘方式)、自主导航方式(主导航类型)、电气功能配置(机器人电气逻辑)等。工具链软件自动生成相关标准程序页,机器人即实现了自主导航的基本功能。
功能分装成块
0基础图形化式开放
内置IEC标准库,包含逻辑运算、数学运算、通讯处理等功能块;内置移动机器人控制库包含底盘控制、导航控制、调度控制等类型全面的功能块。
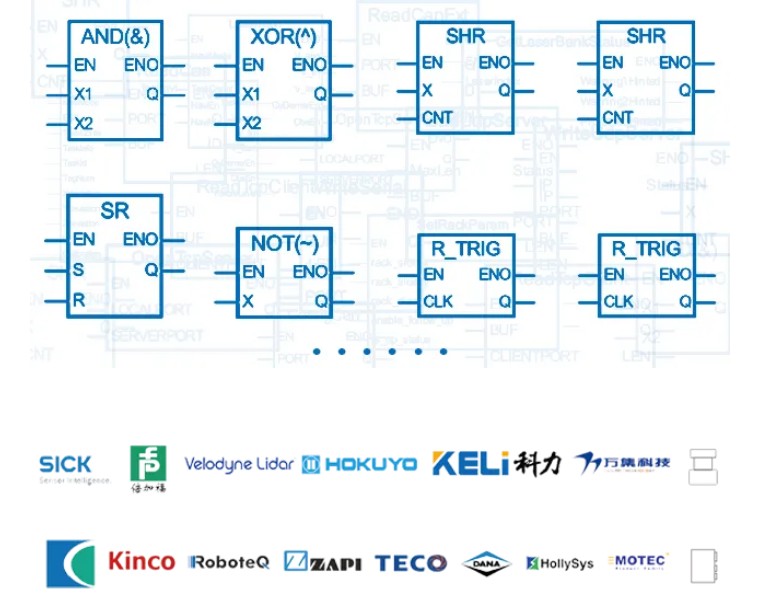
内建适配库
拖动即可支持多种品牌及类型
将各种主流常用的激光传感器、二维码相机、伺服驱动器、网络模块、避障类传感器、天线、显示屏等按品牌封装成功能块,方便直接调用。
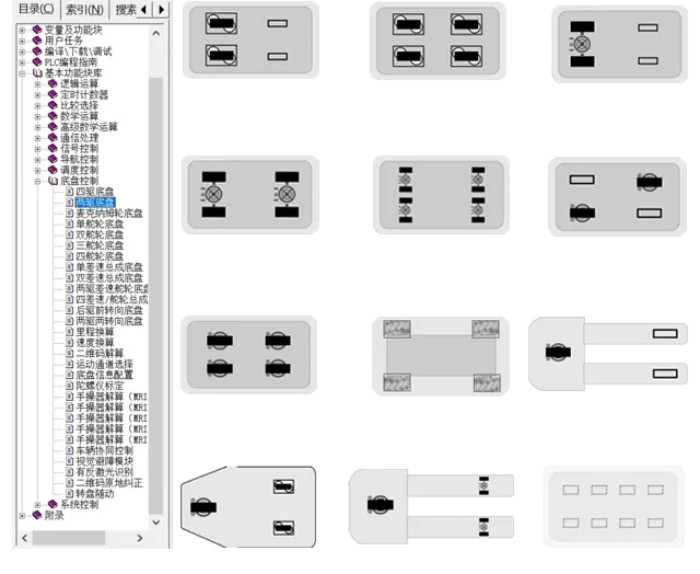
底盘自由配置
开发不再受限于运动模型
支持两驱差速、四驱差速、单差速总成、双差速总成、四差速总成、单舵轮、双舵轮、四舵轮、麦克纳姆轮、两驱差速舵轮、单舵轮双差速总成等主流底盘方式,以及个性化底盘方式。
自定义工装机构
用户自主定制编写功能模块
可实现机器人的行业应用功能,如液压控制、叉齿控制、抬升机构、顶升机构、抱夹机构、皮带机构、滚筒机构、升降机构、旋转机构、机械臂、柔性机械臂和云台控制及专属机构等,以及信号指示、语音交互、HMI人机操作等。
轻松拓展车辆应用功能
展现移动机器人无限可能性
可根据项目现场应用需求,提供行业应用工艺软件包,如绕障、电梯及多楼层、栈板识别、货车位置识别等。

自定义工装机构
用户自主定制编写功能模块
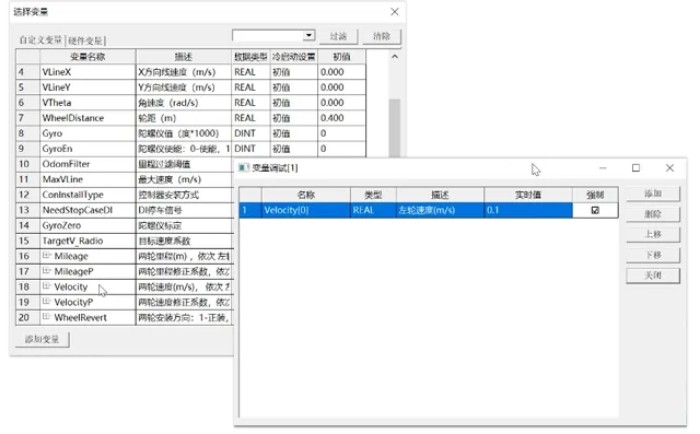
通过联机实时查看机器人的全部状态信息,可及时诊断到机器人运行状态,全面提升机器人连续可靠稳定运行能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
资料:移动机器人能否自动充电?2016-01-20 0
-
Labview My RIO 移动机器人2016-08-21 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 0
-
如何实现移动机器人的设计?2020-11-23 0
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 0
-
什么是移动机器人软硬件系统问题2021-08-06 0
-
移动机器人的三种主要运动系统2021-09-01 0
-
科聪智能移动机器人自主导航控制器MRC5000系列介绍2021-01-27 11770
-
复合移动机器人(AGV/AMR),如何快速构建?2022-03-28 1383
-
因为专注 所以专业 | 科聪移动机器人专用控制器重磅来袭2023-04-17 1198
-
移动机器人的构建2023-07-04 370
-
「科聪二次开发平台」移动机器人开发,只需3步!2023-11-06 1152
-
科聪停车移动机器人整体解决方案!2023-11-30 738
全部0条评论

快来发表一下你的评论吧 !
