

【开源汇总】开源DIY-四轴飞行器/瓦力机器人/GB游戏机/履带机器人
描述
本文章为开源硬件项目分享汇总,各位小伙伴联系社区助理,提供相关电子设计作品,积极分享自己的开源项目经历哦~
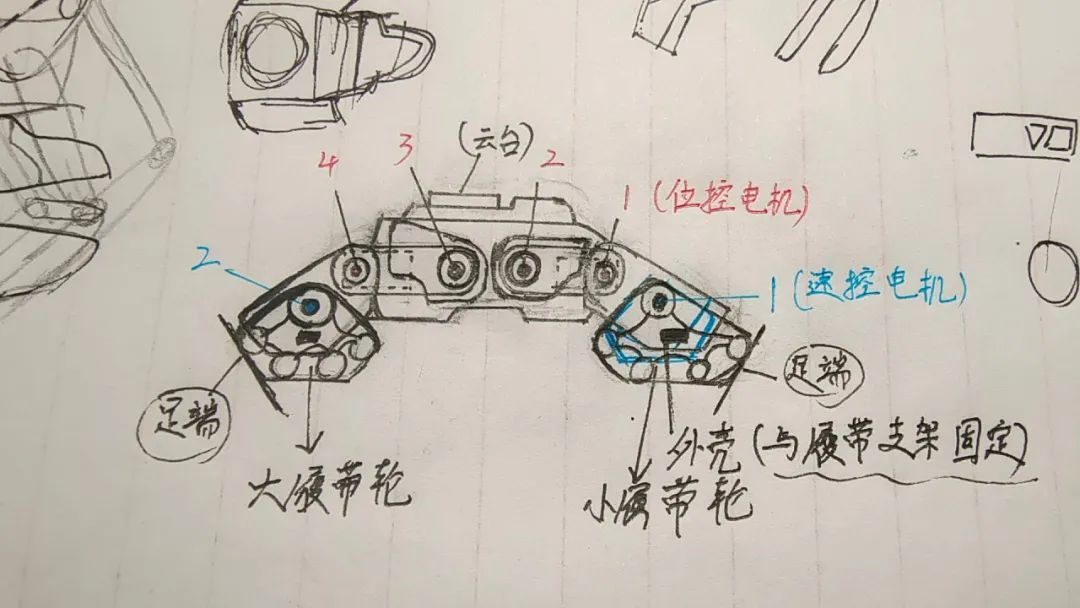
大神的毕业设计-履带四足复合机器人
作者:PCBguy
芯片:ESP32-WROVER-E
项目简介:本项目中,履足式复合机器人拥有两种行进模式:四足行进模式、履带行进模式,应对不同场景及地形时能够切换形态。四足形态下整体总共拥有8个自由度DOF,单腿各具备2个自由度DOF,足端结构融入了履带机构,各履带机构配备1个直流电机驱动。
✦
✦
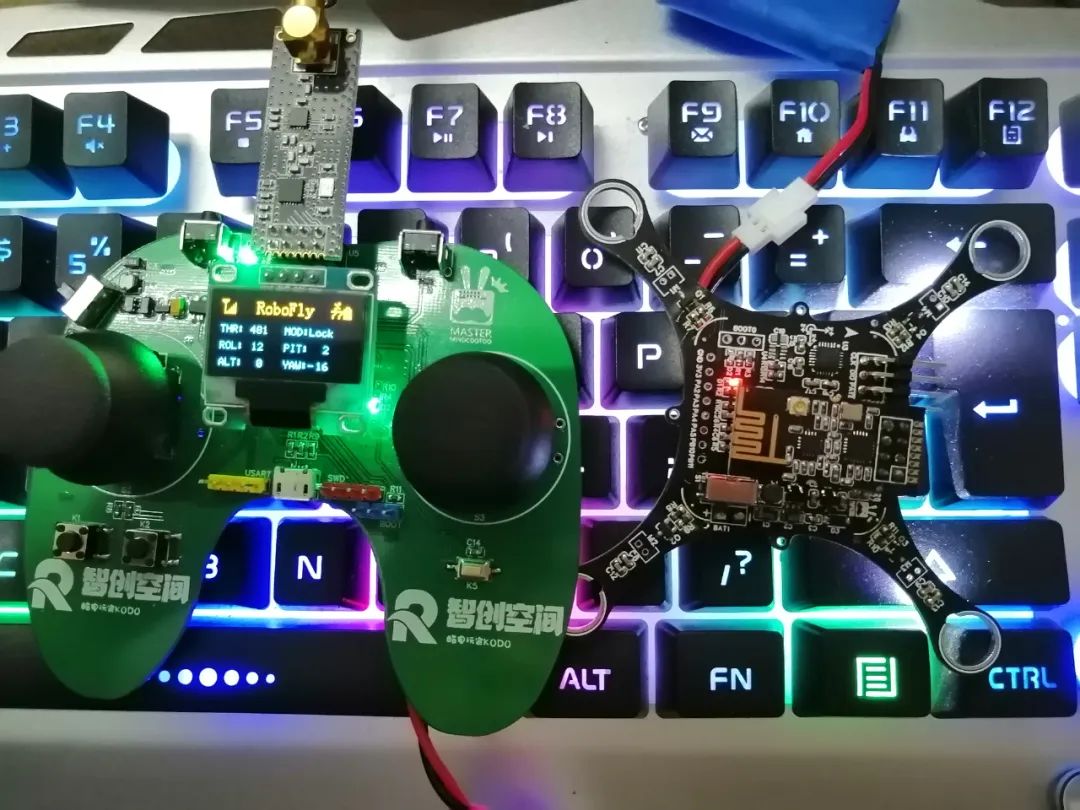
STM32四轴遥控器
作者:酷电玩家
芯片:STM32F103C8T6
项目简介:基于小马哥RoboFly开源四轴软件平台设计的四轴遥控器,主控采用STM32F103C8T6,SI24R01无线通信四轴遥控器,实现OLED四轴姿态回传显示,电压回传显示,一键解锁功能等功能。
✦
✦
STM32四轴飞行器

作者:酷电玩家
芯片:STM32F103
项目简介:小马哥RoboFly开源四轴制作的四轴飞行器,新版的STM32四轴飞行器V3.0工程。功能实现:SI24R1 2.4G遥控,OLED实时显示四轴姿态,电压回传,可二次开发;STM32F103主控,集成MPU6050姿态传感器、ws2812B全彩指示灯等,预留可扩展接口。
✦
✦
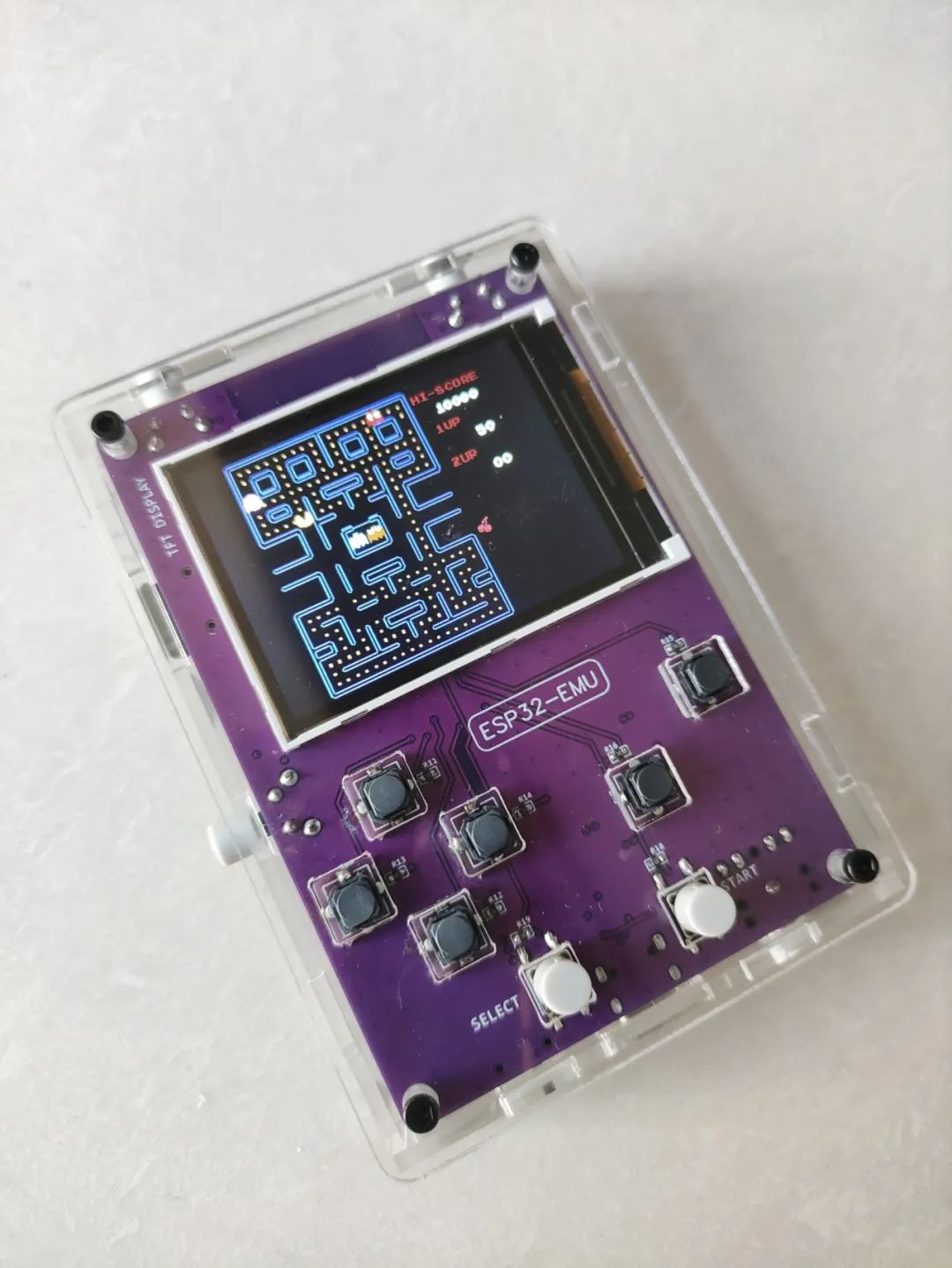
大佬自制GameBoy游戏机
作者:高能小新
芯片:ESP32-EMU
项目简介:本工程基于esplay,在原作者的基础上修改了部分元件和威廉希尔官方网站 ,并重新绘制了PCB。
✦
✦
最简单DIY基于STM32的远程控制电脑系统

作者:daodanjishui
芯片:STM32F103ZET6
项目简介:ST公司STM32F103ZET6自带的鼠标控制电脑的方案,使用到正点原子战舰开发板和配套的4.3寸电容触摸屏,最终实现的是单片机的触摸屏鼠标控制的效果。
✦
✦
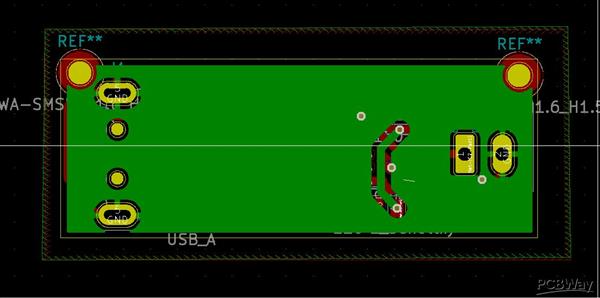
ESP32/STM32 电源系统设计
作者:study875
芯片:LM2594M
项目简介:在这个项目中,我将设计一个 ESP32/STM32 电源系统。通过研究,我注意到 ESP32 和 STM32 由 3V3 输出电源系统供电。对于这个项目,我们的输入将是一个通过 USB 端口的 5V 输入。
✦
✦
如果有想要分享经历的小伙伴
可以扫描下方二维码添加小助微信

加入交流群,领电子工程师项目资料
加群→发分享文章截图给管理员→领取资料
发烧友技术交流群
- 相关推荐
- 机器人
-
#硬声创作季 【全球优秀机器人开源项目系列】DIY迷你四轴飞行器!!!Mr_haohao 2022-10-21
-
履带机器人 金属底盘2012-08-14 0
-
DIY机器人2012-08-15 0
-
甲壳虫机器人DIY【暴强分享】2012-08-29 0
-
机器人、四轴飞行器7个制作实例解析2014-06-25 0
-
【mBot申请】家庭物联网机器人2015-11-30 0
-
开源四轴飞行器2016-03-03 0
-
ColorSky双足机器人开源项目2016-04-21 0
-
自律型机器人制作入门.基于Arduino2016-06-23 0
-
可视化机器人2016-07-31 0
-
模仿老鹰抓猎物的机器人2016-09-28 0
-
履带式移动机器人的设计2017-07-27 0
-
机器人是什么?2022-03-31 0
-
每周精选 | 瓦力机器人开源分享,OpenHarmony 3.2 Beta1 版本介绍2022-06-02 0
-
开源作品!稚晖君超迷你低成本开发板、超酷机器人、智能手环等参考方案2023-12-12 0
全部0条评论

快来发表一下你的评论吧 !
