

您了解RTK技术吗?—— 揭秘GNSS中的定位技术
描述
上期文章中我们一起探讨了GNSS仿真及其对测试验证的重要意义,今天我们将一起走进GNSS中的定位技术—RTK技术。什么是RTK技术?传统RTK技术与网络RTK技术又有什么区别呢?
随着GNSS系统的迅速发展,RTK技术由于可以在作业区域内提供实时的厘米级定位精度,在自动驾驶、无人机、精准农业和工业机器人等方面得到了广泛的应用。RTK技术全称为RTK(Real-time kinematic,实时动态)载波相位差分技术,是一种对GNSS进行辅助的技术。
GNSS卫星之所以能够对地球的终端进行定位,依靠的其实是三维坐标系,通过四颗卫星分别计算各个卫星与终端的距离△L,组成四个方程组后进行计算,分别得到经度、纬度、高程和时间。通过单位时间的位置变化,计算出终端的速度,三维坐标以及时间信息。
然而,卫星定位是存在误差的,误差既来自系统的内部,也来自外部。例如卫星信号穿透电离层和对流层时产生的误差,还有卫星高速移动产生的多普勒效应引起的误差等等,它们影响了系统的准确性和可靠性。为了更好地消除误差、提高定位精度,即出现了RTK定位技术。
除了卫星之外,RTK系统包括两个重要组成部分——基准站和流动站,这两个站都带有卫星接收机,可以观测和接收卫星数据。定位过程如下:
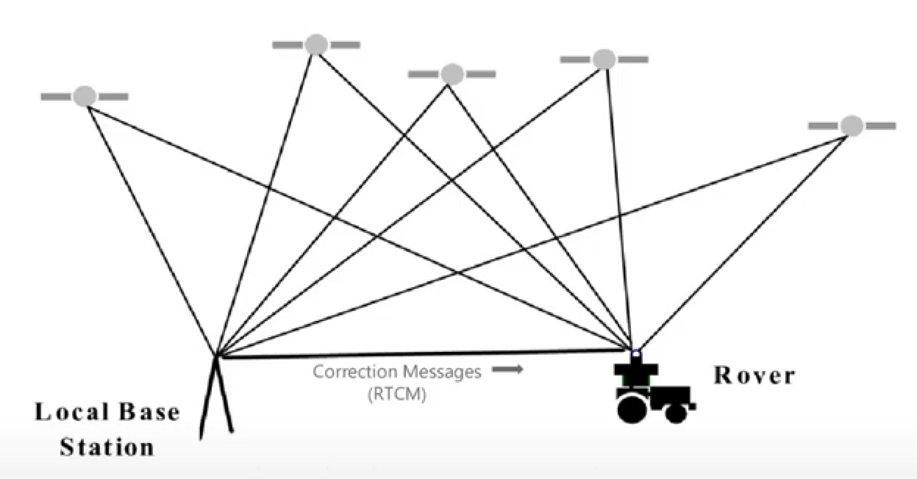
- 基准站先观测和接收卫星数据;
- 基准站通过旁边的无线电台(数据链),将观测数据实时发送给流动站(距离一般不超过20公里);
- 流动站收到基准站数据的同时,也观测和接收了卫星数据;
- 流动站在基准站数据和自身数据的基础上,根据相对定位原理,进行实时差分运算,从而解算出流动站的三维坐标及精度,其定位精度可达1cm~2cm。即完成定位。
以上所述的定位技术是传统的RTK技术,它存在一个问题:流动站和基准站之间存在距离限制。为了解决这个问题,即出现了网络RTK技术。网络RTK相比于传统RTK是用区域型的GNSS网络误差模型取代了单点GNSS误差模型。
网络RTK用多个基准站组成基准站网,它们将数据发给中央服务器。中央服务器会根据数据模拟出一个“虚拟基准站”,因此,网络RTK也被称为“虚拟基准站技术”。对于流动站来说,它只会看到这个“虚拟基准站”,基于这个“虚拟基准站”发来的数据完成最终的测量运算。
在网络RTK的模型中,网络的稳定性对定位精度影响极大,必须保证网络通信稳定,从而确保差分数据稳定传输,才能实现超高定位精度。目前许多GNSS模拟器中也能通过RTCM消息生成虚拟基站。

虹科Orolia GSG-8高级模拟器基于Skydel模拟引擎,具有高级干扰和欺骗模拟选项,用于在实际条件下进行测试。虹科Orolia Skydel软件还能够按需求进行定制开发,以提高全球导航卫星系统接收器测试的准确性和完整性。虹科提供专门设计和制造的模拟解决方案,以满足多种最新应用的要求,从而以高精度进行GNSS信号的接收测试,并带来以下三种解决方案:
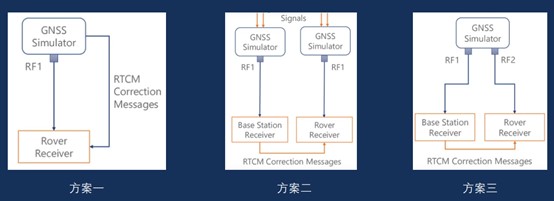
方案一: 通过一台模拟器进行,在GNSS模拟器中模拟卫星信号,转化为射频信号后由流动接收机进行接收,同时串行传输RTCM消息给接收机,从而计算出高精度的定位,但是这种方案一般应用于已知接收机有RTK的功能。
方案二: 使用两台GNSS模拟器,创建相同的模拟,需要同时使用同一个时钟源让它们实现同步,然后同样把卫星信号转化为射频信号,一个传送给基准站接收机,另一个送给流动站接收机,同时基准站接收机会发送RTCM消息给流动站,然后流动站计算,实现高精度定位。
方案三: 使用同一个模拟器创建模拟,可以不使用同步,两路信号同样一个给基站,一个给流动站;然后基站再发送RTCM消息给流动站,流动站计算,实现高精度定位。
-
揭秘GNSS实验室2019-09-23 0
-
GNSS 多星定位原理及校正方式对比2022-06-28 0
-
TAU1312 多系统多频 RTK 定位模块2023-09-06 0
-
TAU1308 多系统 RTK 定位模块2023-09-07 0
-
基于CORS系统的高精度RTK定位技术设计详解2018-07-25 14045
-
RTK差分定位技术GNSS位移监测站2022-12-02 865
-
传统RTK技术与网络RTK技术有什么区别呢?2023-01-08 4037
-
自动驾驶定位方式:RTK定位与激光融合定位2023-06-02 547
-
apollo自动驾驶中的GNSS/融合定位技术2023-06-06 466
-
关于GNSS技术的这些事,你了解吗?(一)2023-04-10 6972
-
GNSS RTK实时差分人员定位系统组成部分包括哪些?答案在这里2023-07-28 2341
-
细说GNSS模拟器的RTK功能(一)2023-08-01 2060
-
RTK定位技术原理和误差分析2023-09-28 9728
-
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!(二)2023-12-20 650
-
RTK、PPP与RTK-PPP?一文带您认识高精定位及如何进行高精定位GNSS测试!2023-12-20 2165
全部0条评论

快来发表一下你的评论吧 !
