

应用案例 | 当机械臂抓取物料时,如何精准拿捏尺度?
描述
随着工业自动化行业的不断发展,可以看到越来越多的智能设备采用灵活、高效、精准的机械臂完成定位抓取、组装等。最常见的是使用机器视觉应用,机器视觉将目标物体的图像信息通过光学设备和传感器获取后,将其转化为数字化信息(坐标位置和角度),并依据控制单元指导,使机器可以有效地执行任务。
但这次的任务中,我们选择了更经济的激光位移测距方案来实现机械臂的定位抓取,本期小明就来分享一下具体的应用情况~
场景需求
需要使用传感器进行测距,以完成机械臂定位抓取物料
传感器需支持485通讯模式
检测距离500mm
精度要求1mm
选型分析
1、MLD23系列,量程从10mm到160mm,线性精度从0.01mm到0.32mm,适用于一般需求,对精度没有超高要求,又想进行精准定位,普通光电满足不了需求,可以考虑该系列产品,同时它还拥有模拟量信号输出,可将测量数据以电压或者电流形式传输到上位机。
2、MLD21系列,量程从70mm到400mm,线性精度从0.07mm到0.4mm,该系列特点是大量程,适合远距离安装,另外有模拟量和485通讯可供选择,上位机信息交互更为丰富。
3、MLD33系列,量程从8mm到300mm,线性精度从0.008mm到0.3mm,这个系列的优势就在于更高的精度把控,以及正反射系列可以测量透明体,是点激光位移中,不可多得的优势产品,同样有模拟量和422通讯接口。
选型推荐:MLD21-500N-485
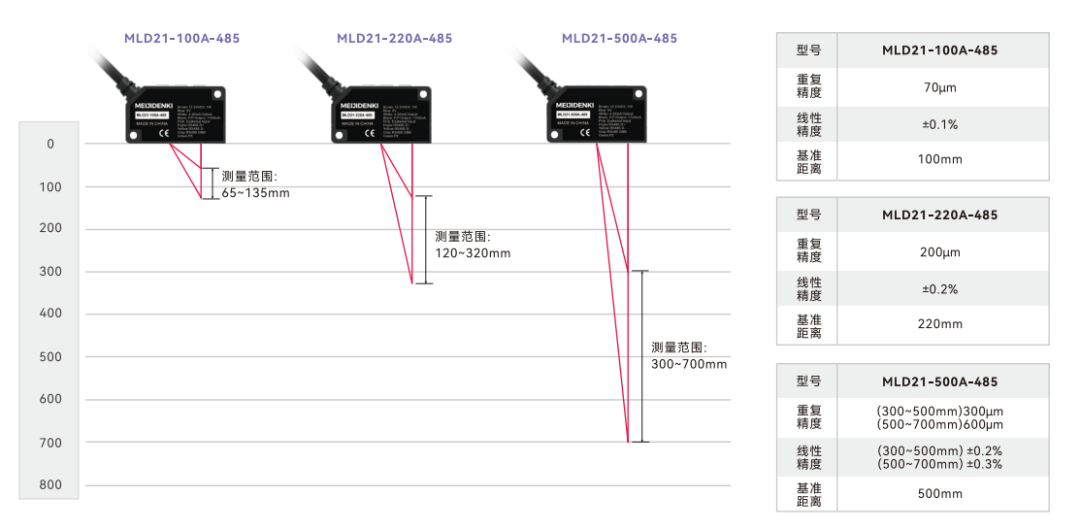
可选用明治大量程激光位移传感器MLD21-500N-485,量程300-700mm
支持485通讯模式,符合客户要求
精度可达0.4mm,可稳定进行定位
采用CMOS感光元件利用三角反射测量原理实现高精度检测
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
挖掘机技术哪家强?!(基于51单片机的4自由度机械臂设计)2017-04-05 0
-
【瑞芯微RK1808计算棒试用申请】机械臂快速识别抓取系统2019-09-23 0
-
空间站机械臂抓取物体matlab代码实现设计2021-09-07 0
-
如何去开发一款基于RGB-D相机与机械臂的三维重建无序抓取系统2021-09-08 0
-
示教器或ROS是如何控制UR机械臂的2021-09-14 0
-
臂- 手系统主动抓取策略及仿真2009-07-11 493
-
如何使用深度强化学习进行机械臂视觉抓取控制的优化方法概述2018-12-19 3439
-
基于YOLOv3等的机械臂药盒智能抓取方法2021-06-23 882
-
机械臂路径规划方案的简单介绍2021-07-12 2907
-
机械臂抓取从入门到实战课程2023-02-13 3256
-
机械臂快递分拣系统(一)之机械臂控制程序(下位机)编写2023-05-18 472
-
基于深度强化学习的视觉反馈机械臂抓取系统2023-06-12 2336
-
抓取机器人为什么都采用伺服电机?2023-06-15 734
-
什么是相机标定?视觉机械臂自主抓取全流程2023-08-15 5308
-
智能目标颜色识别抓取丨国产Cortex-A55人工智能实验箱机械臂案例分享2024-08-10 352
全部0条评论

快来发表一下你的评论吧 !
