

聊聊雷达信号处理框架
电子说
描述
这期聊聊框架,希望对你有所启发。雷达信号处理框架是整个信号处理的骨架,只有建立了合适的处理框架,往里添加子模块反而是相对容易的事情。
注意这里的用词,“合适的”处理框架。是的,首先处理框架有多种选择,并且最重要的是,所作的选择要适合于实际的应用场景,否则雷达环境感知效果并不能达到预期。这期主要聚焦于两种处理框架。
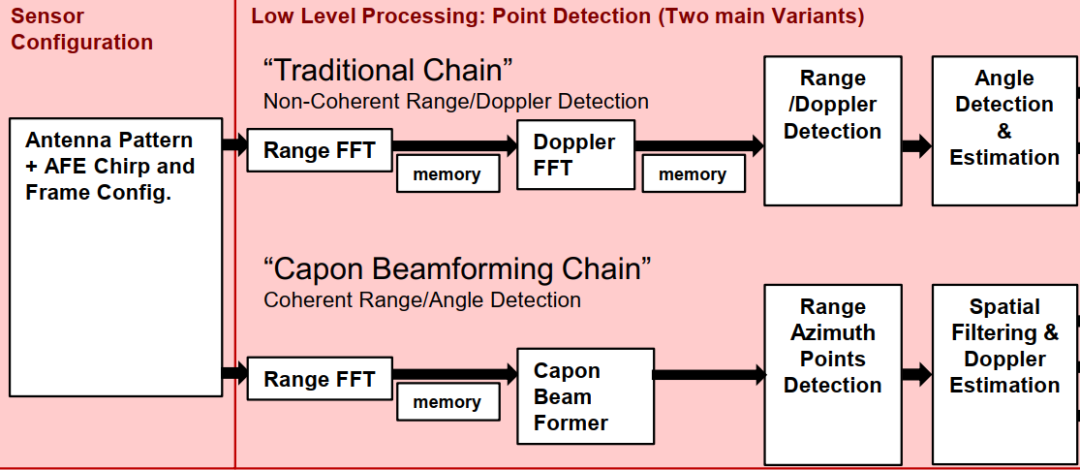
图1 RSP framework
如图1所示,第1种是被称作“traditional chain”, 它的处理思路是adc数据作range-FFT,再到doppler-FFT,构建range-Dopper map,再到cfar,最后对候选点作angle-FFT,当然,这是最经典的framework,这其中的每个环节可以用更高级的信号处理方法替换,比如angle-FFT这个环节,完全可以用其他方法替换,以求更好的角度性能,不过这一切都是基于建立了framework之后。
与之对应的是“Capon Beamforming Chain”, 其处理思路是对adc数据作range-FFT,然后角度为使用capon,以构建range-Azimuth map,再到cfar,对候选点作elevation BF 以及Doppler-FFT。同样的,这里的每个环节都可以用其他高级信号处理方法替换,比如capon可以替换为MUSIC等,以求更好的性能。

图1 range-Doppler map
这里的核心问题是如何在两者之间选择,这需要对两个框架的特征深入了解。最重要的差异点是range-Doppler map以及range-Azimuth map。选择的map不同,采用的cfar方法,筛选detections的策略也都会不同,以至于同一场景,基于不同map的点云输出天壤之别。
一般来讲,range-Doppler map由于有通道之间的非相参积累(Non-coherent Integration),存在相应的非相参积累增益,并且不论range-FFT还是Doppler FFT,其FFT 点数相对angle-FFT来说是比较高的,所以基于range-Doppler map的处理相对来说会获得较高的处理增益,适合检测行人等VRU目标。
在一些近距离需要大带宽高分辨应用,range-Doppler map是不太适合的,主要原因在于doppler谱扩展导致的互干扰和虚警比较严重。此外,该框架带来的副作用是角度维处理只有单快拍(single snapshot),而基于单快拍DoA方法的选择面相对来说窄一些。

图2 range-Azimuth map
而对于range-Azimuth map,由于直接获得的是方位信息,不会受到类似range-Doppler map的困扰,并且可以分析每个位置反射点的微多普勒分布,这对于分析行人运动是极其有利的。由于方位信息随距离增加而分辨率及精度降低,性能下降严重,因此该框架并不适合远距离应用,适合室内人员检测等超短距离应用。
此外,由于angle-FFT在Doppler-FFT之前,完全可以用chirp间的对应复数数据作快拍数据,从而构建合适的协方差矩阵,这对于capon,MUSIC等对协方差矩阵要求高的方法来讲简直是福音。因此,该framework对DoA是相当友好的。但是由于缺乏相应的非相参积累增益,目标检测性能稍微弱一些,但对于室内等短距离应用问题不大。
此外,类似相控阵,芯片级联,TX beamforming 等技术引入,信号处理框架也日趋丰富,但是基调还是要以应用场景为导向,以选择合适的方法。
-
基于高速定点DSP的雷达信号处理实验系统2009-09-04 411
-
超高速雷达数字信号处理技术2009-10-21 1775
-
基于FPGA的雷达信号处理系统设计2015-10-30 956
-
雷达信号处理的基本知识的课件2015-12-24 749
-
雷达信号处理基础_部分12016-04-05 1229
-
雷达信号处理基础_部分22016-04-05 812
-
雷达信号处理基础_部分32016-04-05 1116
-
雷达信号分析与处理2016-08-05 1330
-
雷达信号处理 Matlab程序2016-12-15 1100
-
AESA雷达信号处理应用2017-09-15 847
-
雷达信号处理中大数据量FFT的实现2018-01-18 2513
-
雷达信号处理基础英文版pdf2022-03-07 1084
-
雷达信号处理:FPGA还是GPU?2022-12-14 2358
-
自动驾驶中的雷达信号处理2023-06-07 326
-
雷达信号处理需要哪些基础知识2023-10-08 591
全部0条评论

快来发表一下你的评论吧 !
