

基于博流BL606P音视频开发板的CAN扩展模块收发测试
描述
编辑语:
芯片开放社区(OCC)面向广大开发者推出应用实战系列内容,通过分享开发者实战开发案例,总结应用开发经验,梳理开发中的常见问题及解决方案,为后续参与的开发者提供更多参考与借鉴。
本文是关于开发者 zhanghui 基于BL606P-DVK开发板实战开发的系列文章中的第五篇,主要介绍了CAN扩展模块收发测试,后面还会持续更新社区开发者的测评内容,敬请期待!
本计划是使用这款开发板来播放CAN通信控制的语音播放功能的,对语音这块还不太会用,下面测试下扩展CAN通信模块收发测试功能。
01 硬件部分
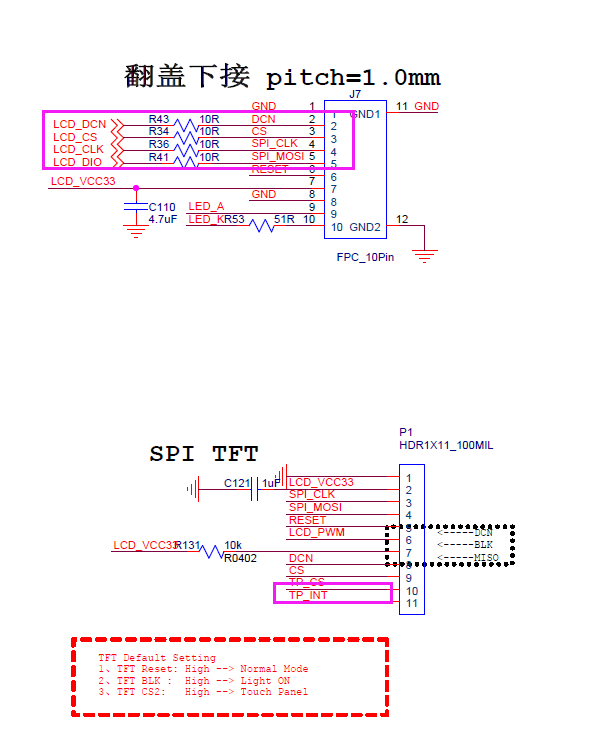
1.1 使用到了硬件上的LCD接口
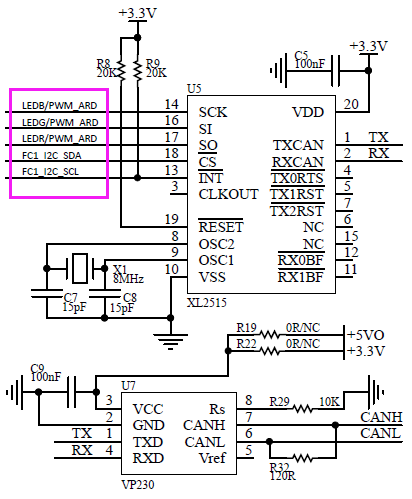
1.2 外扩CAN模块部分
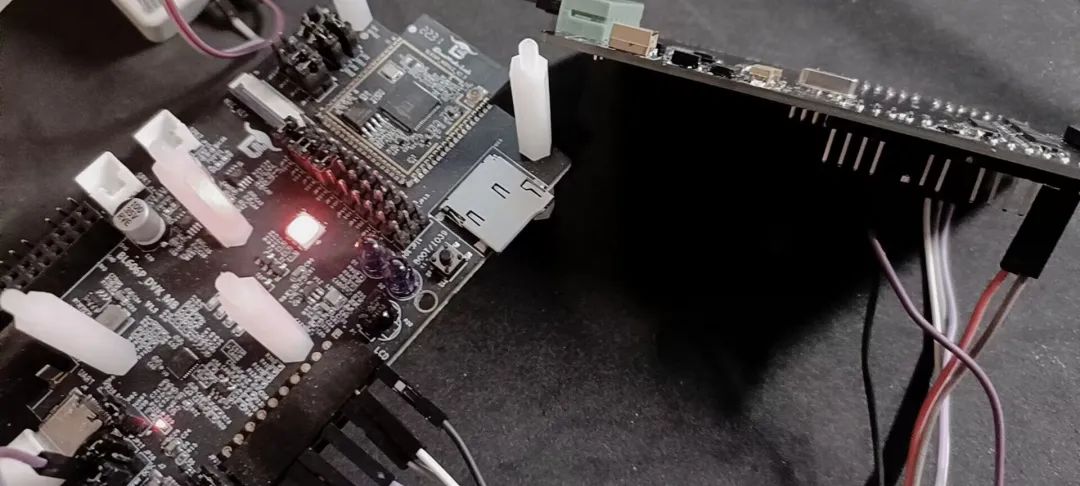
1.3 硬件连接图
02 程序部分
2.1 端口初始化部分
gpio_dev_t gpio_2515_so = { GPIO_PIN_24, INPUT_PULL_UP, NULL }; //PIO24/LCD-PWM
gpio_dev_t gpio_2515_si = { GPIO_PIN_26, OUTPUT_PUSH_PULL, NULL }; //PIO26/LCD-DIO
gpio_dev_t gpio_2515_sck= { GPIO_PIN_27, OUTPUT_PUSH_PULL, NULL }; //PIO27/LCD-CLK
gpio_dev_t gpio_2515_cs = { GPIO_PIN_28, OUTPUT_PUSH_PULL, NULL }; //PIO28/LCD-CS
gpio_dev_t gpio_2515_int = { GPIO_PIN_25, IRQ_MODE, NULL }; //PIO25
#define mcp2515_clk_l() hal_gpio_output_low(&gpio_2515_sck)
#define mcp2515_clk_h() hal_gpio_output_high(&gpio_2515_sck)
#define mcp2515_si_l() hal_gpio_output_low(&gpio_2515_si )
#define mcp2515_si_h() hal_gpio_output_high(&gpio_2515_si )
#define mcp2515_cs_l() hal_gpio_output_low(&gpio_2515_cs )
#define mcp2515_cs_h() hal_gpio_output_high(&gpio_2515_cs )
csi_pin_set_mux( GPIO_PIN_24, PIN_FUNC_GPIO);
csi_pin_set_mux( GPIO_PIN_25, PIN_FUNC_GPIO);
csi_pin_set_mux( GPIO_PIN_26, PIN_FUNC_GPIO);
csi_pin_set_mux( GPIO_PIN_27, PIN_FUNC_GPIO);
csi_pin_set_mux( GPIO_PIN_28, PIN_FUNC_GPIO);
hal_gpio_init(&gpio_2515_so);
hal_gpio_init(&gpio_2515_si);
hal_gpio_init(&gpio_2515_sck);
hal_gpio_init(&gpio_2515_cs);
hal_gpio_init(&gpio_2515_int);
hal_gpio_output_low(&gpio_2515_si);
hal_gpio_output_low(&gpio_2515_sck);
hal_gpio_output_low(&gpio_2515_cs);
hal_gpio_enable_irq(&gpio_2515_int, IRQ_TRIGGER_FALLING_EDGE, can_eint, NULL);
2.2 main.c
#include#include #include #include "app_main.h" #include #include "led.h" #include "tm1638.h" #include "mcp2515.h" int main(int argc, char *argv[]) { int i=0; uint8_t dispbuf[8]; uint32_t cnt=0; uint8_t cantx_buf[8]; board_yoc_init(); init_led(); init_tm1638(); init_mcp2515(); printf(" app start core clock %d........ ", soc_get_cur_cpu_freq()); disp_log(); aos_msleep(2000); //codec_output_init(); //codec_input_init(); //codec_loop_init(); for(i=0;i<8;i++) { dispbuf[i]=0; } while(1) { cantx_buf[0]=i; cantx_buf[1]=i+1; cantx_buf[2]=i+2; cantx_buf[3]=i+3; cantx_buf[4]=i; cantx_buf[5]=i+1; cantx_buf[6]=i+2; cantx_buf[7]=i+3; CAN_Send(cantx_buf); printf("can tx data : %02x %02x %02x %02x %02x %02x %02x %02x ",cantx_buf[0],cantx_buf[1],cantx_buf[2],cantx_buf[3],cantx_buf[4],cantx_buf[5],cantx_buf[6],cantx_buf[7]); i++; if(i>250) { i=0; } set_ledr(); clr_ledg(); clr_ledb(); aos_msleep(100); clr_ledr(); set_ledg(); clr_ledb(); aos_msleep(100); clr_ledr(); clr_ledg(); set_ledb(); aos_msleep(100); clr_ledr(); clr_ledg(); clr_ledb(); aos_msleep(100); if(cnt>999) { cnt=0; } cnt++; dispbuf[4]=cnt/1000; dispbuf[5]=(cnt%1000)/100; dispbuf[6]=((cnt%1000)%100)/10; dispbuf[7]=((cnt%1000)%100)%10; disp_led(dispbuf); } return 0; }
2.3 can接收部分程序
void can_eint(void *args)
{
uint8_t rx_sta;
rx_sta=CAN_ReadINTF();
if(rx_sta&0x01)
{
CAN_SetINTF(0x00);
CAN_RecRXB0(canrx_buf);
printf("can rx data : %02x %02x %02x %02x %02x %02x %02x %02x
",canrx_buf[0],canrx_buf[1],canrx_buf[2],canrx_buf[3],canrx_buf[4],canrx_buf[5],canrx_buf[6],canrx_buf[7]);
}
}
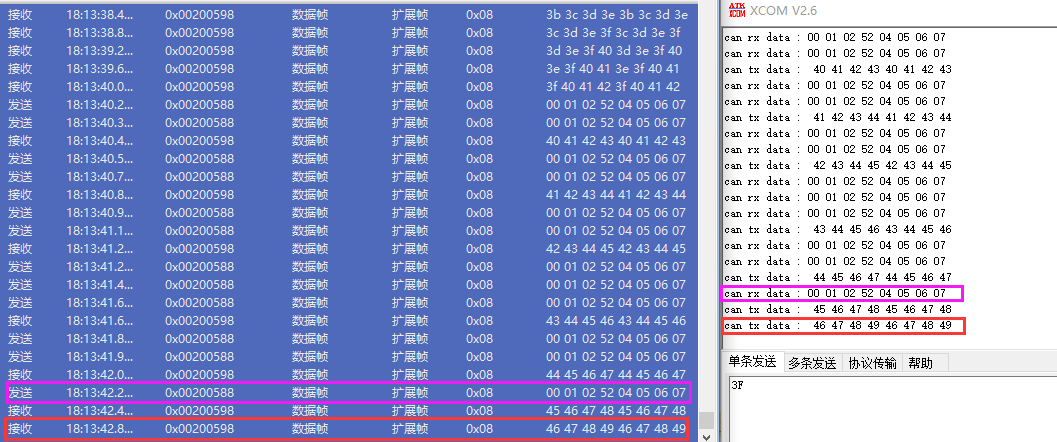
03 运行结果
CAN软件和串口收发数据显示
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
博流BL606P音视频开发板:(三)ADC测试2023-04-10 795
-
基于博流BL606P音视频开发板的智能音箱测试2023-05-09 936
-
基于博流BL606P音视频开发板通过蓝牙进行WIFI配网测试2023-05-10 1030
-
博流BL606P音视频开发板:HelloWord Demo运行及跳线帽设置2023-05-15 1097
-
基于博流BL606P音视频开发板实现RGB点灯2023-05-18 1040
-
基于博流BL606P音视频开发板的ADC Key按钮例程2023-05-22 1180
-
博流BL606P音视频开发板CKLink无法下载的解决办法2023-05-29 892
-
基于博流BL606P音视频开发板的智能音箱系统开发方案2023-06-06 2723
-
基于博流BL606P音视频开发板的开发环境搭建及例程测试2023-06-09 791
-
基于博流BL606P音视频开发板的蓝牙音频测试2023-06-25 630
-
基于博流BL606P音视频开发板驱动LED数码管2023-06-29 493
-
基于BL606P-DVK音视频开发板的实战案例2023-07-06 587
-
基于博流BL606P音视频开发板的GPIO点灯教程2023-07-17 702
-
基于博流BL606P音视频开发板的音响测试2023-07-25 592
全部0条评论

快来发表一下你的评论吧 !
