

Linux USB设备驱动模型查看
描述
1. BUS/DEV/DRV 模型
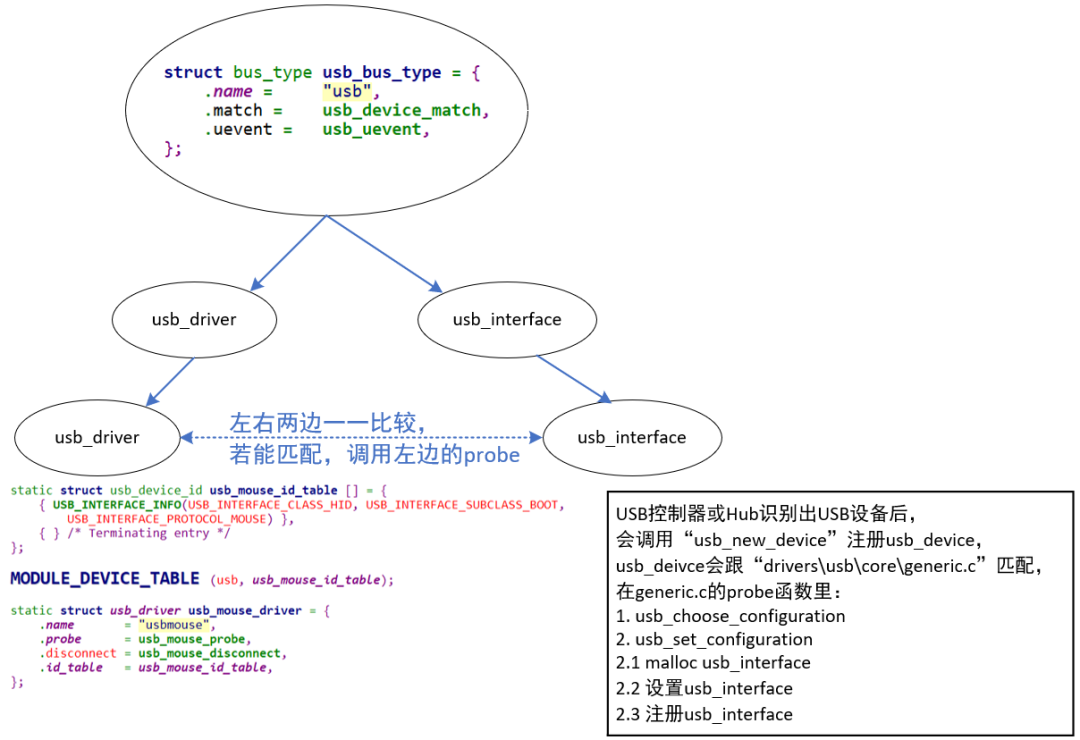
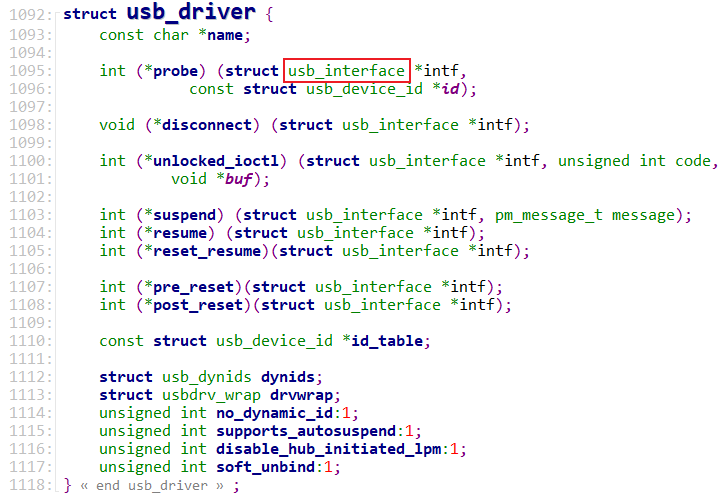
"USB 接口"是逻辑上的 USB 设备 ,编写的 usb_driver 驱动程序,支持的是"USB 接口":
- USB 控制器或 Hub 识别出 USB 设备后,会创建、注册 usb_device
- usb_device 被"driversusbcoregeneric.c" 驱动认领后,会选择、设置某个配置
- 这个配置下面的接口,都会分配、设置、注册一个 usb_interface
- 左边的 usb_driver 和右边的 usb_interface 如果匹配,则调用 usb_driver.probe
2. 接口函数
在 USB 设备驱动程序中,能使用的 USB 函数都在这个头文件里:includelinuxusb.h。
2.1 pipe
使用这些接口函数的主要目的是传输数据,传输数据的对象是 USB 设备里的某个 endpoint,这被称为 pipe:
/* Create various pipes... */
#define usb_sndctrlpipe(dev, endpoint)
((PIPE_CONTROL < < 30) | __create_pipe(dev, endpoint))
#define usb_rcvctrlpipe(dev, endpoint)
((PIPE_CONTROL < < 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndisocpipe(dev, endpoint)
((PIPE_ISOCHRONOUS < < 30) | __create_pipe(dev, endpoint))
#define usb_rcvisocpipe(dev, endpoint)
((PIPE_ISOCHRONOUS < < 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndbulkpipe(dev, endpoint)
((PIPE_BULK < < 30) | __create_pipe(dev, endpoint))
#define usb_rcvbulkpipe(dev, endpoint)
((PIPE_BULK < < 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
#define usb_sndintpipe(dev, endpoint)
((PIPE_INTERRUPT < < 30) | __create_pipe(dev, endpoint))
#define usb_rcvintpipe(dev, endpoint)
((PIPE_INTERRUPT < < 30) | __create_pipe(dev, endpoint) | USB_DIR_IN)
2.2 同步传输函数
对于控制传输、批量传输、中断传输,有 3 个同步函数可以用来直接发起传输。这些函数内部会创建、填充、提交一个 URB("usb request block"),并等待它完成或超时。
函数原型如下:
int usb_control_msg(struct usb_device *dev, unsigned int pipe, __u8 request,
__u8 requesttype, __u16 value, __u16 index, void *data,
__u16 size, int timeout);
int usb_bulk_msg(struct usb_device *usb_dev, unsigned int pipe,
void *data, int len, int *actual_length, int timeout);
int usb_interrupt_msg(struct usb_device *usb_dev, unsigned int pipe,
void *data, int len, int *actual_length, int timeout);
2.3 异步传输函数
使用 URB 进行传输时,它是异步方式:需要先分配、构造、提交一个 URB("usb request block"),当传输完成后,它的回调函数被调用。
关键就在于需要填充 URB:
- dev:跟谁传输数据
- pipe:跟哪个 pipe 传输数据
- buffer:里面存有要发送的数据,或者用来接收要读取的数据
- 数据长度
- 回调函数
2.3.1 分配和释放 URB
函数原型如下:
struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags);
void usb_free_urb(struct urb *urb);
2.3.2 分配/释放 DMA Buffer
发起 USB 传输时,数据保存在 buffer 里。这个 buffer 可以是一般的 buffer,也可以是 DMA Buffer。
对于一般的 buffer,在提交 URB 时会临时分配一个 DMA Buffer:
- 发送数据时:函数内部会先从一般 buffer 中把数据复制到 DMA Buffer,在提交给 USB 控制器
- 读取数据时:USB 控制器先把数据传到 DMA Buffer,函数内部在把 DMA Buffer 的数据复制到一般 buffer
- 中间增加了一次数据的拷贝,效率低
我们可以直接使用 DMA Buffer,函数原型如下:
void *usb_alloc_coherent(struct usb_device *dev, size_t size, gfp_t mem_flags,dma_addr_t *dma);
void usb_free_coherent(struct usb_device *dev, size_t size, void *addr,dma_addr_t dma);
2.3.3 填充 URB
对于控制传输、批量传输、中断传输,分别有如下函数:
static inline void usb_fill_control_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
unsigned char *setup_packet,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context);
static inline void usb_fill_bulk_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context);
static inline void usb_fill_int_urb(struct urb *urb,
struct usb_device *dev,
unsigned int pipe,
void *transfer_buffer,
int buffer_length,
usb_complete_t complete_fn,
void *context,
int interval);
如果 URB 使用 DMA Buffer,那么还需要设置一个 flag 表明这点:
urb- >transfer_dma = DMA address of buffer; // usb_alloc_coherent的输出参数
urb- >transfer_flags |= URB_NO_TRANSFER_DMA_MAP;
2.3.4 提交 URB
构造好 URB 后,需要提交到 USB 系统里,才能启动传输。
int usb_submit_urb(struct urb *urb, gfp_t mem_flags);
2.3.5 取消 URB
已经提交的 URB,可以取消它,有 2 个函数:
- usb_kill_urb:这是一个同步函数,它会等待 URB 结束
- usb_unlink_urb:这是一个异步函数,它不会等待 URB 结束,USB 控制器驱动会调用它的回调函数
void usb_kill_urb(struct urb *urb);
int usb_unlink_urb(struct urb *urb);
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何使用Linux内核实现USB驱动程序框架2020-11-06 1040
-
嵌入式Linux下的USB设备驱动2018-12-07 0
-
详解linux设备驱动模型架构2019-07-25 0
-
基于Linux的USB设备驱动方法有什么优点?2019-11-07 0
-
基于USB设备的Linux网络驱动程序开发2009-08-11 609
-
Linux环境下USB的原理、驱动和配置2010-01-16 936
-
嵌入式Linux下的USB设备驱动技术2010-05-08 1850
-
嵌入式Linux的USB驱动设计2011-06-08 698
-
Linux设备驱动模型摘抄2012-03-19 511
-
《Linux设备驱动开发详解》第20章、USB主机与设备驱动2017-10-27 940
-
Linux设备驱动的模型摘抄2017-10-31 754
-
Linux下的硬件驱动—USB设备(上)2019-04-02 505
-
Linux下的硬件驱动—USB设备(下)2019-04-02 442
-
Linux总线、设备、驱动模型的探究2022-02-14 513
-
基于ARM的USB无线网卡Linux设备驱动设计2023-10-12 302
全部0条评论

快来发表一下你的评论吧 !
