

通过linux跑一个ubuntu的带图形界面的系统
嵌入式技术
描述
一 背景
一直想通过linux平台跑一个类似于ubuntu的带图形界面的系统,于是买了一块linux开发板,最终只是能跑个linux系统,没有把图形加进去,后来就没有再去深入研究了,最近终于有一点时间来研究一下了。
二 搭建裸机开发环境
2.1 准备相关的资源
2.1.1 vmware虚拟机
15.1.0 build-13591040
2.1.2 ubuntu系统镜像
ubuntu-20.04.1-desktop-amd64
这里的镜像是使用鸿蒙系统已编译好的code.1.0基础上开发的
2.1.3 AM335X_StarterWare_02_00_01_01_Setup.bin
到TI官网搜索下载StarterWare:https://www.ti.com/tool/STARTERWARE-SITARA#tech-docs
2.1.4 BBB补丁
StarterWare_BBB_support.tar.gz
2.1.5 交叉编译器
gcc-arm-none-eabi-4_7-2013q1-20130313-linux.tar.bz2
2.1.6 串口驱动
Adafruit 4 Pin Cable (PL2303),需要下载PL2303串口驱动,需要注意下载特定的版本,否则会提示使用不了,也不能使用WIN10自带的USB串口驱动
2.1.7 终端调试工具
SecureCRT6.5.0
2.1.8 读卡器和SD卡
SD卡容量在2G以上
三 安装交叉编译环境
3.1 解压缩工具链文件
gcc-arm-none-eabi-4_7-2013q1-20130313-linux.tar.bz2
3.2 设置环境变量
gedit /etc/profile打开配置文件
export PATH=$PATH:/home/harmony/gcc-arm-none-eabi-4_7-2013q1-20130313-linux/gcc-arm-none-eabi-4_7-2013q1/bin/
export LIB_PATH=/home/harmony/gcc-arm-none-eabi-4_7-2013q1-20130313-linux/gcc-arm-none-eabi-4_7-2013q1
source /etc/profile 使配置生效
arm-none-eabi-gcc -v查看编译器是否安装成功
四 编译运行GPIO测试程序
4.1 解压startware软件包
cd到AM335X_StarterWare_02_00_01_01_Setup.bin所在的目录
执行安装指令
./AM335X_StarterWare_02_00_01_01_Setup.bin
4.2 打上bb-black补丁
解压缩StarterWare_BBB_support.tar.gz覆盖文件
4.3 编译源码
4.3.1 编译bootloader
cd build/armv7a/gcc/am335x/beaglebone/bootloader/
make clean
make
4.3.2 编译gpio
cd ..
cd gpio/
make clean
make
4.3.3 插入SD卡通过读卡器连接到电脑
将bootloader输出bin文件重命名为MLO(没有后缀),将gpio输出的bin文件更改为app(没有后缀)
4.3.4 将两个文件拷贝到SD卡根目录下
4.3.5 将SD卡取出插入到BB-black开发板
先按住boot再开电源上电
可以看到LED在闪烁
五 编译并运行Debian系统
(参考element14 BeagleBone Black用户手册_V2.1.pdf)
5.1 获取源码
可通过官网下载或者使用开发板自带的源文件
bb-black-debian-kernel-3.8.tar.bz2
bb-black-debian-u-boot.tar.bz2
5.2 解码源码
tar xvf bb-black-debian-u-boot.tar.bz2
tar xvf bb-black-debian-kernel-3.8.tar.bz2
5.3 安装交叉编译器
gcc-linaro-arm-linux-gnueabihf-4.8-2014.03_linux.tar.xz
5.3.1 设置环境变量
export
CC=`pwd`/gcc-linaro-arm-linux-gnueabihf-4.8-2014.03_linux/bin/arm-linux-gnue
abihf-
5.4 编译u-boot
cd u-boot
make ARCH=arm CROSS_COMPILE=${CC} distclean //清理
make ARCH=arm CROSS_COMPILE=${CC} am335x_evm_config //配置
make ARCH=arm CROSS_COMPILE=${CC} //编译输出
5.5 编译kernel
sudo apt-get install lzop// 可能会报/bin/sh: lzop: command not found错误,需要安装 lzop 包
cd kernel
cp ../configs/beaglebone .config
make ARCH=arm CROSS_COMPILE=${CC} zImage dtbs
5.6 准备镜像文件
一共有五个文件
mkdir ~/images
cd u-boot
cp MLO ~/images
cp u-boot.img ~/images
cd kernel/kernel
cp arch/arm/boot/zImage ~/images
cp arch/arm/boot/dts/am335x-boneblack.dtb ~/images
mkdir ~/images/rootfs
cd ~/kernel/kernel
make ARCH=arm CROSS_COMPILE=${CC} modules
make ARCH=arm CROSS_COMPILE=${CC} modules_install INSTALL_MOD_PATH=$HOME/images/rootfs
cd ~/images/rootfs
tar -czvf ../kernel_modules.tar.gz ./
cd ~/images/
rm -rf rootfs
$HOME/images
cd ~/images/
ls
am335x-boneblack.dtb kernel_modules.tar.gz MLO u-boot.img zImage
5.7 更新镜像到eMMC中
将以上镜像复制到SD卡中,把SD卡插入读卡器,接入BB-black的USB接口
mkdir /media/sda1
mount /dev/sda1 /media/sda1 //挂载U盘
mkdir /media/mmcblk0p1
mount /dev/mmcblk0p1 /media/mmcblk0p1
cp -f /media/sda1/MLO /media/mmcblk0p1/
cp -f /media/sda1/u-boot.img /media/mmcblk0p1/
cp -f /media/sda1/zImage /media/mmcblk0p1/
cp -f /media/sda1/am335x-boneblack.dtb /boot/uboot/dtbs/
tar -xvf /media/sda1/kernel_modules.tar.gz -C /
#同步文件,写入eMMC
sync
reboot
5.8 至此系统更新完毕后会自动运行
以下为完整的系统启动日志:
U-Boot SPL 2014.04-rc3 (May 02 2022 - 23:22:21)
reading args
spl_load_image_fat_os: error reading image args, err - -1
reading u-boot.img
reading u-boot.img
U-Boot 2014.04-rc3 (May 02 2022 - 23:22:21)
I2C: ready
DRAM: 512 MiB
NAND: 0 MiB
MMC: OMAP SD/MMC: 0, OMAP SD/MMC: 1
*** Warning - readenv() failed, using default environment
Net: < ethaddr > not set. Validating first E-fuse MAC
cpsw, usb_ether
Warning: Your board does not use generic board. Please read
doc/README.generic-board and take action. Boards not
upgraded by the late 2014 may break or be removed.
Hit any key to stop autoboot: 0
gpio: pin 53 (gpio 53) value is 1
Card did not respond to voltage select!
mmc0(part 0) is current device
Card did not respond to voltage select!
gpio: pin 56 (gpio 56) value is 0
gpio: pin 55 (gpio 55) value is 0
gpio: pin 54 (gpio 54) value is 0
mmc1(part 0) is current device
gpio: pin 54 (gpio 54) value is 1
SD/MMC found on device 1
reading uEnv.txt
1699 bytes read in 6 ms (276.4 KiB/s)
gpio: pin 55 (gpio 55) value is 1
Loaded environment from uEnv.txt
Importing environment from mmc ...
Checking if uenvcmd is set ...
gpio: pin 56 (gpio 56) value is 1
Running uenvcmd ...
reading zImage
4379112 bytes read in 249 ms (16.8 MiB/s)
reading initrd.img
2952653 bytes read in 190 ms (14.8 MiB/s)
reading /dtbs/am335x-boneblack.dtb
24968 bytes read in 10 ms (2.4 MiB/s)
Kernel image @ 0x82000000 [ 0x000000 - 0x42d1e8 ]
## Flattened Device Tree blob at 88000000
Booting using the fdt blob at 0x88000000
Using Device Tree in place at 88000000, end 88009187
Starting kernel ...
Uncompressing Linux... done, booting the kernel.
[ 0.355566] omap2_mbox_probe: platform not supported
[ 0.362094] tps65217-bl tps65217-bl: no platform data provided
[ 0.426288] bone-capemgr bone_capemgr.9: slot #0: No cape found
[ 0.463398] bone-capemgr bone_capemgr.9: slot #1: No cape found
[ 0.500505] bone-capemgr bone_capemgr.9: slot #2: No cape found
[ 0.537613] bone-capemgr bone_capemgr.9: slot #3: No cape found
[ 0.552871] bone-capemgr bone_capemgr.9: slot #6: BB-BONELT-HDMIN conflict P8.45 (#5:BB-BONELT-HDMI)
[ 0.562503] bone-capemgr bone_capemgr.9: slot #6: Failed verification
[ 0.576257] omap_hsmmc mmc.5: of_parse_phandle_with_args of 'reset' failed
[ 0.584643] bone-capemgr bone_capemgr.9: loader: failed to load slot-6 BB-BONELT-HDMIN:00A0 (prio 2)
[ 0.639443] pinctrl-single 44e10800.pinmux: pin 44e10854 already requested by 44e10800.pinmux; cannot claim for gpio-leds.8
[ 0.651156] pinctrl-single 44e10800.pinmux: pin-21 (gpio-leds.8) status -22
[ 0.658437] pinctrl-single 44e10800.pinmux: could not request pin 21 on device pinctrl-single
Loading, please wait...
modprobe: chdir(3.8.13): No such file or directory
modprobe: chdir(3.8.13): No such file or directory
modprobe: chdir(3.8.13): No such file or directory
systemd-fsck[215]: rootfs: clean, 79943/233856 files, 452128/933632 blocks
Debian GNU/Linux 7 beaglebone ttyO0
default username:password is [debian:temppwd]
Support/FAQ: http://elinux.org/Beagleboard:BeagleBoneBlack_Debian
The IP Address for usb0 is: 192.168.7.2
beaglebone login: root
Password:
Last login: Thu May 15 02:19:04 UTC 2014 on ttyO0
Linux beaglebone 3.8.13 #1 SMP Mon May 2 23:43:36 CST 2022 armv7l
The programs included with the Debian GNU/Linux system are free software;
the exact distribution terms for each program are described in the
individual files in /usr/share/doc/*/copyright.
Debian GNU/Linux comes with ABSOLUTELY NO WARRANTY, to the extent
permitted by applicable law.
root@beaglebone:~# [ 26.168165] libphy: PHY 4a101000.mdio:01 not found
[ 26.173471] net eth0: phy 4a101000.mdio:01 not found on slave 1
^C
root@beaglebone:~#
六 LED字符设备开发
6.1 LED驱动程序
6.1.1 寄存器方式
参考startware通过寄存器方式操作gpio,这种方式的执行效率会更高
#include < linux/module.h >
#include< linux/fs.h >
#include< linux/errno.h >
#include< linux/miscdevice.h >
#include< linux/kernel.h >
#include< linux/major.h >
#include< linux/mutex.h >
#include< linux/proc_fs.h >
#include< linux/seq_file.h >
#include< linux/stat.h >
#include< linux/init.h >
#include< linux/device.h >
#include< linux/tty.h >
#include< linux/kmod.h >
#include< linux/gfp.h >
#include< asm/io.h >
//函数声明
static ssize_t led_drv_read(struct file *file, char __user *buf, size_t nbytes, loff_t *ppos);
static ssize_t led_drv_write(struct file *file, const char __user *buffer,size_t count, loff_t *ppos);
static int led_drv_open(struct inode *inode, struct file *filp);
static int __init led_init(void);
static void __exit led_exit(void);
/*registers*/
static volatile unsigned int *SOC_GPIO_1_REGS = NULL;
static volatile unsigned int *SOC_CONTROL_REGS = NULL;
// led类
static struct class *led_class;
static int major = 250;
static int minor=0;
static dev_t devno;
static struct device *test_device;
#define GPIO_REVISION (0x0)
#define GPIO_SYSCONFIG (0x10)
#define GPIO_IRQSTATUS_RAW(n) (0x24 + (n * 4))
#define GPIO_IRQSTATUS(n) (0x2C + (n * 4))
#define GPIO_IRQSTATUS_SET(n) (0x34 + (n * 4))
#define GPIO_IRQSTATUS_CLR(n) (0x3C + (n * 4))
#define GPIO_IRQWAKEN(n) (0x44 + (n * 4))
#define GPIO_SYSSTATUS (0x114)
#define GPIO_CTRL (0x130)
#define GPIO_OE (0x134)
#define GPIO_DATAIN (0x138)
#define GPIO_DATAOUT (0x13C)
#define GPIO_LEVELDETECT(n) (0x140 + (n * 4))
#define GPIO_RISINGDETECT (0x148)
#define GPIO_FALLINGDETECT (0x14C)
#define GPIO_DEBOUNCENABLE (0x150)
#define GPIO_DEBOUNCINGTIME (0x154)
#define GPIO_CLEARDATAOUT (0x190)
#define GPIO_SETDATAOUT (0x194)
/* Values helping to decide the value on a GPIO pin. */
#define GPIO_PIN_LOW (0x0)
#define GPIO_PIN_HIGH (0x1)
#define CONTROL_CONF_MUXMODE(n) (n)
#define HWREG(x)
(*((volatile unsigned int *)(x)))
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_SLEWCTRL (0x00000040u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_SLEWCTRL_SHIFT (0x00000006u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_RXACTIVE (0x00000020u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_RXACTIVE_SHIFT (0x00000005u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUDEN (0x00000008u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUDEN_SHIFT (0x00000003u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUTYPESEL (0x00000010u)
#define CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUTYPESEL_SHIFT (0x00000004u)
#define GPIO_SYSCONFIG_SOFTRESET (0x00000002u)
#define CONTROL_CONF_GPMC_AD(n) (0x800 + (n * 4))
#define GPIO_SYSSTATUS_RESETDONE (0x00000001u)
#define GPIO_SYSSTATUS_RESETDONE_SHIFT (0x00000000u)
#define GPIO_SYSSTATUS_RESETDONE_COMPLETE (0x1u)
#define GPIO_SYSSTATUS_RESETDONE_ONGOING (0x0u)
#define GPIO_CTRL_DISABLEMODULE (0x00000001u)
#define GPIO_CTRL_DISABLEMODULE_SHIFT (0x00000000u)
#define GPIO_CTRL_DISABLEMODULE_DISABLED (0x1u)
#define GPIO_CTRL_DISABLEMODULE_ENABLED (0x0u)
/* This is used to configure a GPIO pin as an input pin. */
#define GPIO_DIR_INPUT 1
/* This is used to configure a GPIO pin as an output pin.*/
#define GPIO_DIR_OUTPUT 0
//#define GPIO_INSTANCE_ADDRESS (SOC_GPIO_1_REGS)
#define GPIO_INSTANCE_PIN_NUMBER (24)
//3、定义自己的 file_operations 结构体
static const struct file_operations my_fops = {
.read = led_drv_read,
.write = led_drv_write,
.open = led_drv_open,
.owner = THIS_MODULE,
};
void GPIOPinWrite(unsigned int baseAdd,
unsigned int pinNumber,
unsigned int pinValue)
{
if(GPIO_PIN_HIGH == pinValue)
{
HWREG(baseAdd + GPIO_SETDATAOUT) = (1 < < pinNumber);
}
else
{
HWREG(baseAdd + GPIO_CLEARDATAOUT) = (1 < < pinNumber);
}
}
//4、实现对应的 drv_open/drv_read/drv_write 等函数,填入 file_operations 结构体
static ssize_t led_drv_read(struct file *file, char __user *buf, size_t nbytes, loff_t *ppos)
{
return 0;
}
static ssize_t led_drv_write(struct file *file, const char __user *buffer,size_t count, loff_t *ppos)
{
char val;
/*1、get data from app*/
/*copy_from_user(void * to, const void __user * from, unsigned long n):get form app*/
copy_from_user(&val,buffer,1);
/*2、set register out 1/0*/
printk(KERN_EMERG "led_drv_write =%dn",val);
GPIOPinWrite(SOC_GPIO_1_REGS,
GPIO_INSTANCE_PIN_NUMBER,
(val==1));
return 1;
}
static int led_drv_open(struct inode *inode, struct file *filp)
{
/*3、configure gpA10 as gpio*/
return 0;
}
void GPIOModuleEnable(unsigned int baseAdd)
{
/* Clearing the DISABLEMODULE bit in the Control(CTRL) register. */
HWREG(baseAdd + GPIO_CTRL) &= ~(GPIO_CTRL_DISABLEMODULE);
}
void GPIOModuleReset(unsigned int baseAdd)
{
/*
** Setting the SOFTRESET bit in System Configuration register.
** Doing so would reset the GPIO module.
*/
HWREG(baseAdd + GPIO_SYSCONFIG) |= (GPIO_SYSCONFIG_SOFTRESET);
/* Waiting until the GPIO Module is reset.*/
while(!(HWREG(baseAdd + GPIO_SYSSTATUS) & GPIO_SYSSTATUS_RESETDONE));
}
void GPIO1PinMuxSetup(unsigned int pinNo)
{
HWREG(SOC_CONTROL_REGS + CONTROL_CONF_GPMC_AD(pinNo)) =
(CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_SLEWCTRL | /* Slew rate slow */
CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_RXACTIVE | /* Receiver enabled */
(CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUDEN & (~CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUDEN)) | /* PU_PD enabled */
(CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUTYPESEL & (~CONTROL_CONF_GPMC_AD_CONF_GPMC_AD_PUTYPESEL)) | /* PD */
(CONTROL_CONF_MUXMODE(7)) /* Select mode 7 */
);
}
void GPIODirModeSet(unsigned int baseAdd,
unsigned int pinNumber,
unsigned int pinDirection)
{
/* Checking if pin is required to be an output pin. */
if(GPIO_DIR_OUTPUT == pinDirection)
{
HWREG(baseAdd + GPIO_OE) &= ~(1 < < pinNumber);
}
else
{
HWREG(baseAdd + GPIO_OE) |= (1 < < pinNumber);
}
}
#define GPIO_TO_PIN(bank, gpio) (32 * (bank) + (gpio))
#define GPIO_FAIL_SAVE_TIME4_EN GPIO_TO_PIN(1, 2)
static int __init led_init(void)
{
printk(KERN_EMERG "%s %s line %dn", __FILE__, __FUNCTION__, __LINE__);
major = register_chrdev(0,"my_led",&my_fops);
devno = MKDEV(major, 0);
printk(KERN_EMERG "major=%dn",major);
led_class = class_create(THIS_MODULE, "myled");
/*创建/dev/myled*/
device_create(led_class, NULL, devno,NULL,"myled");
gpio_request(GPIO_FAIL_SAVE_TIME4_EN, "set_fail_save_low");
gpio_direction_output(GPIO_FAIL_SAVE_TIME4_EN, 0);
return 0;
}
static void __exit led_exit(void)
{
printk(KERN_EMERG "led_exitn");
if (SOC_CONTROL_REGS)
{
//printk(KERN_EMERG "exist SOC_CONTROL_REGSn");
// iounmap(SOC_CONTROL_REGS);
}
if (SOC_CONTROL_REGS)
{
// printk(KERN_EMERG "exist SOC_GPIO_1_REGSn");
// iounmap(SOC_GPIO_1_REGS);
}
if (led_class)
{
//device_destroy(cls,devno);
//class_destroy(cls);
//unregister_chrdev(major,"led");
printk(KERN_EMERG "exist led_classn");
device_destroy(led_class, devno);
class_destroy(led_class);
unregister_chrdev(major,"my_led");
}
printk(KERN_EMERG "led_exit okn");
}
//修饰入口、出口函数
module_init(led_init);
module_exit(led_exit);
MODULE_DESCRIPTION("led Driver");
MODULE_LICENSE("GPL");
6.1.2 gpio库方式
使用通用API来操作gpio资源
#include < linux/module.h >
#include < linux/fs.h >
#include< linux/errno.h >
#include< linux/miscdevice.h >
#include< linux/kernel.h >
#include< linux/major.h >
#include< linux/mutex.h >
#include< linux/proc_fs.h >
#include< linux/seq_file.h >
#include< linux/stat.h >
#include< linux/init.h >
#include< linux/device.h >
#include< linux/tty.h >
#include< linux/kmod.h >
#include< linux/gfp.h >
#include< asm/io.h >
#include< linux/gpio.h >
static ssize_t led_drv_read(struct file *file, char __user *buf, size_t nbytes, loff_t *ppos);
static ssize_t led_drv_write(struct file *file, const char __user *buffer,size_t count, loff_t *ppos);
static int led_drv_open(struct inode *inode, struct file *filp);
static int __init led_init(void);
static void __exit led_exit(void);
static struct class *led_class;
static int major = 250;
static int minor=0;
static dev_t devno;
#define GPIO_TO_PIN(bank, gpio) (32 * (bank) + (gpio))
#define GPIO_FAIL_SAVE_TIME4_EN GPIO_TO_PIN(1, 22)
//3、定义自己的 file_operations 结构体
static const struct file_operations my_fops = {
.read = led_drv_read,
.write = led_drv_write,
.open = led_drv_open,
.owner = THIS_MODULE,
};
//4、实现对应的 drv_open/drv_read/drv_write 等函数,填入 file_operations 结构体
static ssize_t led_drv_read(struct file *file, char __user *buf, size_t nbytes, loff_t *ppos)
{
return 0;
}
static ssize_t led_drv_write(struct file *file, const char __user *buffer,size_t count, loff_t *ppos)
{
char val;
/*1、get data from app*/
/*copy_from_user(void * to, const void __user * from, unsigned long n):get form app*/
copy_from_user(&val,buffer,1);
/*2、set register out 1/0*/
printk(KERN_EMERG "led_drv_write =%dn",val);
gpio_set_value(GPIO_FAIL_SAVE_TIME4_EN,val);
return 1;
}
static int led_drv_open(struct inode *inode, struct file *filp)
{
/*3、configure gpA10 as gpio*/
return 0;
}
static int __init led_init(void)
{
printk(KERN_EMERG "%s %s line %dn", __FILE__, __FUNCTION__, __LINE__);
major = register_chrdev(0,"my_led",&my_fops);
devno = MKDEV(major, 0);
printk(KERN_EMERG "major=%dn",major);
led_class = class_create(THIS_MODULE, "myled");
/*创建/dev/myled*/
device_create(led_class, NULL, devno,NULL,"myled");
int get_result = gpio_request(GPIO_FAIL_SAVE_TIME4_EN, "set_fail_save_low");
if (0 == get_result)
{
gpio_direction_output(GPIO_FAIL_SAVE_TIME4_EN, 0);
}
return 0;
}
static void __exit led_exit(void)
{
gpio_free(GPIO_FAIL_SAVE_TIME4_EN);
if (led_class)
{
device_destroy(led_class, devno);
class_destroy(led_class);
unregister_chrdev(major,"my_led");
}
}
//修饰入口、出口函数
module_init(led_init);
module_exit(led_exit);
MODULE_DESCRIPTION("led Driver");
MODULE_LICENSE("GPL");
6.2 测试程序
#include < stdio.h >
#include < sys/types.h >
#include < sys/stat.h >
#include < fcntl.h >
#include < string.h >
#include < unistd.h >
//ledtest /dev/myled on
int main(int argc, char **argv)
{
int fd;
char status = 0;
if(argc != 3){
printf("Usage: %s < dev > < on|off >n",argv[0]);
printf("eg:%s /dev/myled onn",argv[0]);
printf("eg:%s /dev/myled offn",argv[0]);
return -1;
}
//open
fd = open(argv[1],O_RDWR);
if(fd < 0){
printf("open %s errorn",argv[0]);
return -1;
}
//write if是on,status = 1;if是off,status = 0;
if(strcmp(argv[2],"on") == 0){
printf("open ledn");
status = 1;
}
write(fd,&status,1);
}
6.3 Makefile
要注意make rm等字符前需要有个tab,需要指定正在运行的内核源码路径
KERN_DIR = /home/harmony/kernel/kernel
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CC)gcc -o ledtest ledtest.c
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
rm -f ledtest
obj-m += led_my.o
6.4 编译
make ARCH=arm CROSS_COMPILE=${CC}
6.5 测试
6.5.1 拷贝文件
将输出的led_my.ko和ledtest文件复制到SD卡boot区
6.5.2 连接读取器
通过读卡器插入BB-black开发板的USB端口
6.5.3 加载LED驱动模块
#进入BOOT目录
root@beaglebone:~# cd /media/BOOT/
root@beaglebone:/media/BOOT# ls
am335x-boneblack.dtb ledtest System Volume Information zImage
led_my.ko MLO u-boot.img
root@beaglebone:/media/BOOT# insmod led_my.ko
Message from syslogd@beaglebone at May 15 02:30:29 ...
kernel:[ 699.497819] /mnt/hgfs/am335/app_ok/led_my.c led_init line 74
root@beaglebone:/media/BOOT#
Message from syslogd@beaglebone at May 15 02:30:29 ...
kernel:[ 699.504546] major=241
6.5.4 运行ledtest测试程序,打开LED
#复制测试程序到/home目录下
root@beaglebone:/media/BOOT# cp ledtest /home/
# 给ledtest增加权限
root@beaglebone:/home# chmod 777 ledtest
#打开LED灯
root@beaglebone:/home# ./ledtest /dev/myled on
open led
[ 911.100696] led_drv_write =1
Message from syslogd@beaglebone at May 15 02:34:00 ...
kernel:[ 911.100696] led_drv_write =1
6.5.5 对照原理图
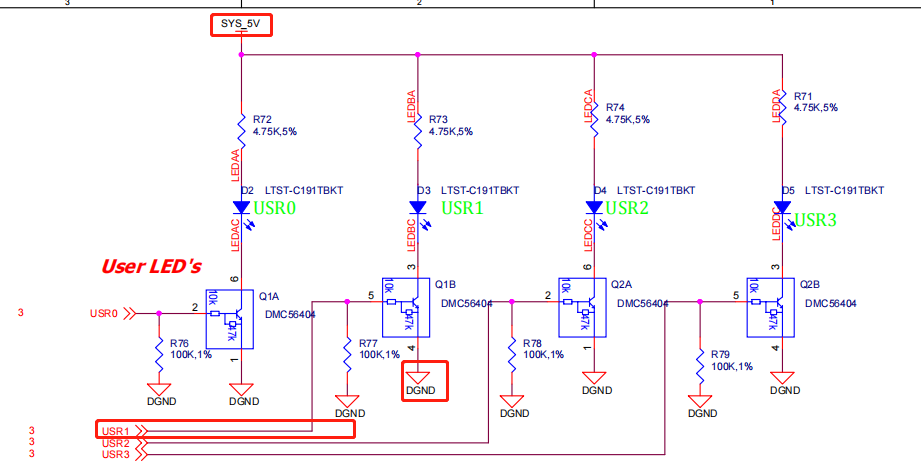
这里的LED的阳极连接了高电平,通过控制阴极为低电平来点亮LED,根据威廉希尔官方网站 原理,使用高电平可使威廉希尔官方网站 导通,使LED的引脚变为低电平。
6.5.6 关闭LED
root@beaglebone:/home# ./ledtest /dev/myled off
kernel:[ 1275.812135] led_drv_write =0
七 总结
7.1 编译驱动程序时报错
7.1.1 cc1: error: code model kernel does not support PIC mod
需要在内核源码目录下的Makefile文件中增加编译选项“-fno-pie”
KBUILD_CFLAGS := -Wall -Wundef -Wstrict-prototypes -Wno-trigraphs
-fno-strict-aliasing -fno-common
-Werror-implicit-function-declaration
-Wno-format-security
-fno-delete-null-pointer-checks
-fno-pie
7.1.2 error: expected ‘:’ or ‘)’ before ‘POPCNT64
需要在编译时增加编译选项
ARCH=arm CROSS_COMPILE=${CC}
7.2 加载驱动时的问题
7.2.1 insmod: ERROR: could not insert module led_my.ko: Invalid module format
7.2.1.1 版本信息不匹配
原因是正在运行的内核版本与源码版本信息有差异
需要重新编译内核,更新内核使编译驱动的内核版本与正在运行内核版本保持一致,通过以下命令查看,如果还是报错,则需要更新内核
uname -r
modinfo led_my.ko
7.2.2 printk不打印信息
使用KERN_EMERG关键字
printk(KERN_EMERG "%s %s line %dn", __FILE__, __FUNCTION__, __LINE__);
7.3 卸载驱动时提示访问空指针
Unable to handle kernel NULL pointer dereference at virtual address 0000000
需要注意卸载驱动调用API的顺序
device_destroy(led_class, devno);
class_destroy(led_class);
unregister_chrdev(major,"my_led");
7.4 测试程序无法运行提示Permission denied
需要把SD卡下的测试程序拷贝到home或其他本地目录增加权限,如果双击tab还是没有提示,则可能是文件的读写权限不够
chmod 777 ledtest
7.5 相关命令
#查看内核版本号
uname -r
root@beaglebone:/home# uname -r
3.8.13
#查看驱动模块
root@beaglebone:/home# lsmod
Module Size Used by
led_my 1475 0
g_multi 47152 2
libcomposite 13879 1 g_multi
ipv6 229038 21
autofs4 17241 2
#查看模块信息
root@beaglebone:/media/BOOT# modinfo led_my.ko
filename: /media/BOOT/led_my.ko
license: GPL
description: led Driver
srcversion: 7A16BEF13016A144BB92AF1
depends:
vermagic: 3.8.13 SMP mod_unload modversions ARMv7 thumb2 p2v8
#查看内核构建时间
Linux version 3.8.13 (root@harmony-virtual-machine) (gcc version 4.8.3 20140303 (prerelease) (crosstool-NG linaro-1.13.1-4.8-2014.03 - Linaro GCC 2014.03) ) #1 SMP Mon May 2 23:43:36 CST 2022
#查看模块是否加载成功
root@beaglebone:/media/BOOT# cat /proc/devices
Character devices:
1 mem
4 /dev/vc/0
4 tty
4 ttyS
5 /dev/tty
5 /dev/console
5 /dev/ptmx
7 vcs
10 misc
13 input
14 sound
29 fb
81 video4linux
89 i2c
90 mtd
116 alsa
128 ptm
136 pts
153 spi
166 ttyACM
180 usb
189 usb_device
212 DVB
226 drm
241 my_led
242 ttyGS
243 roccat
244 hidraw
245 ttySDIO
246 usbmon
247 uio
248 ttyO
249 bsg
250 iio
251 watchdog
252 pps
253 media
254 rtc
Block devices:
1 ramdisk
259 blkext
7 loop
8 sd
31 mtdblock
65 sd
66 sd
67 sd
68 sd
69 sd
70 sd
71 sd
128 sd
129 sd
130 sd
131 sd
132 sd
133 sd
134 sd
135 sd
179 mmc
7.6 gpio子系统相关API参考链接:
https://blog.csdn.net/orz415678659/article/details/8625284
7.7 交叉编译器的一些区别
arm-none-eabi-gcc:是 GNU 推出的的ARM交叉编译工具。可用于交叉编译ARM MCU(32位)芯片,如ARM7、ARM9、Cortex-M/R芯片程序。
arm-linux-gnueabihf-gcc:是由 Linaro 公司基于GCC推出的的ARM交叉编译工具。可用于交叉编译ARM(32位)系统中所有环节的代码,包括裸机程序、u-boot、Linux kernel、filesystem和App应用程序。
-
【LeMaker Guitar试用体验】4 VNC登录图形界面及软件测试2016-01-30 0
-
Linux字符界面与图形界面的切换2017-08-22 0
-
ubuntu环境搭建和ubuntu图形界面操作2018-03-07 0
-
【正点原子FPGA连载】第十章Linux图形界面的使用-领航者ZYNQ之linux开发指南2020-09-10 0
-
RK3399制作无图形界面的ubuntu系统无法启动是怎么回事2022-07-05 0
-
基于嵌入式Linux的图形界面显示系统的设计2009-08-11 743
-
基于uCLinux系统的图形界面研究与实现2009-08-12 642
-
基于UC/OSII的图形界面系统的设计与应用2009-09-02 910
-
VxWorks下多页图形界面的设计2010-07-27 589
-
基于图形界面的配电台区电能质量监测分析系统的设计与实现2009-07-20 1208
-
基于VxWorks下多页图形界面的设计2017-10-24 697
-
Linux图形界面的原理与构成和Linux命令行和vi编辑器的使用手册2018-10-16 1359
-
Linux字符界面转图形界面2019-03-02 7343
-
你知道Linux图形界面中各概念间的关系?2019-04-25 2207
-
嵌入式图形界面2021-10-20 560
全部0条评论

快来发表一下你的评论吧 !
