

RT-Thread开发GD32F450添加串口外设的方法
电子说
描述
开发板使用的是gd32f450zk,env工具使用的版本是1.3.5,rtthread版本是5.0.0。
添加串口外设的方法,串口2是打印口,串口0是数据收发口。
串口2的引脚是PB10和PD9,串口0的引脚是PA9和PA10.
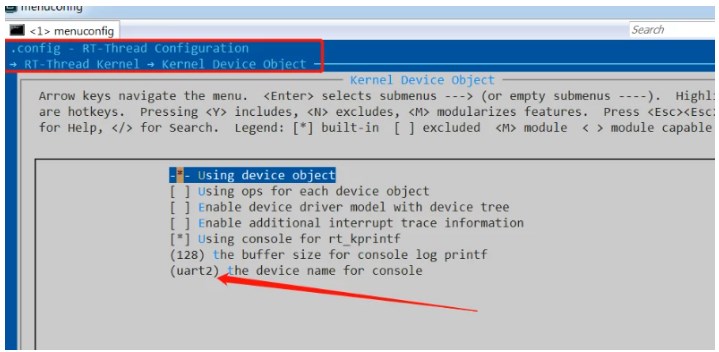
使用env工具,menuconfig进行配置,修改调试打印口的名称为uart2,如下图:
串口的配置,如下图:

保存之后,生成工程。打开工程进行查看,如下图:

对串口2的代码进行修改,修改之后如下:
#ifdef BSP_USING_UART2
{
USART2, // uart peripheral index
USART2_IRQn, // uart iqrn
RCU_USART2, RCU_GPIOB, RCU_GPIOD, // periph clock, tx gpio clock, rt gpio clock
#if defined SOC_SERIES_GD32F4xx
GPIOB, GPIO_AF_7, GPIO_PIN_10, // tx port, tx alternate, tx pin
//GPIOB, GPIO_AF_7, GPIO_PIN_11, // rx port, rx alternate, rx pin
GPIOD, GPIO_AF_7, GPIO_PIN_9, // rx port, rx alternate, rx pin
//GPIOC, GPIO_AF_7, GPIO_PIN_11, // rx port, rx alternate, rx pin
#else
GPIOB, GPIO_PIN_10, // tx port, tx pin
GPIOB, GPIO_PIN_11, // rx port, rx pin
#endif
&serial2,
"uart2",
},
#endif
对工程进行编译,下载到开发板运行,可以看到串口2打印的信息,如下图,

串口0数据收发口的测试,直接复制官方文档的测试demo,进行修改,改成串口0,代码如下:
/*
程序清单:这是一个 串口 设备使用例程
例程导出了 uart_sample 命令到控制终端
命令调用格式:uart_sample uart2
命令解释:命令第二个参数是要使用的串口设备名称,为空则使用默认的串口设备
程序功能:通过串口输出字符串"hello RT-Thread!",然后错位输出输入的字符
/
#include
#define SAMPLE_UART_NAME "uart0"
/ 用于接收消息的信号量 /
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/ 接收数据回调函数 /
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/ 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void serial_thread_entry(void parameter)
{
char ch;
while (1)
{
/ 从串口读取一个字节的数据,没有读取到则等待接收信号量 /
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/ 阻塞等待接收信号量,等到信号量后再次读取数据 /
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/ 读取到的数据通过串口错位输出 */
ch = ch + 1;
rt_device_write(serial, 0, &ch, 1);
}
}
static int uart_sample(int argc, char argv[])
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!rn";
if (argc == 2)
{
rt_strncpy(uart_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
}
/ 查找系统中的串口设备 /
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!n", uart_name);
return RT_ERROR;
}
/ 初始化信号量 /
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/ 以中断接收及轮询发送模式打开串口设备 /
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/ 设置接收回调函数 /
rt_device_set_rx_indicate(serial, uart_input);
/ 发送字符串 /
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/ 创建 serial 线程 /
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/ 创建成功则启动线程 /
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
/ 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(uart_sample, uart device sample);
测试,可以看到串口0发送了信息”hello RT-Thread!”,用串口调试助手进行数据发送,可以看到串口0接收到数据并且返回数据。
在此基础上进行修改,使用3个信号量,设计一种带超时的数据接收处理方式,修改后的代码如下:
/*
Copyright (c) 2006-2021, RT-Thread Development Team
SPDX-License-Identifier: Apache-2.0
Change Logs:
Date Author Notes
2023-02-03 XYZ the first version
/
#include
#include
#include
#include
#define SAMPLE_UART_NAME "uart0"
#define LRNGTH 256
/ 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static struct rt_semaphore rx_semRx;
static struct rt_semaphore rx_semRxTimeOut;
static rt_device_t serial;
static uint8_t bufTemp[LRNGTH]={0};
static uint8_t bufTempNum=0;
//发送函数
static int Bsp_Tx(uint8_t *buf,int size)
{
rt_device_write(serial, 0, buf, size);
// for(int k=0;k < size;k++)
// {
// rt_kprintf("send_buf[%d]=%02xrn",k,buf[k]);
// }
return 0;
}
//调用此函数,获取接收数据,带超时
static int Bsp_Rx(uint8_t *buf,int size)
{
rt_err_t ret;
// struct timeval tv = { 0 };
// struct timezone tz = { 0 };
// gettimeofday(&tv, &tz);
// rt_kprintf("time1:%drn",tv.tv_sec);
ret=rt_sem_take(&rx_semRxTimeOut, 1000);//1秒超时
// gettimeofday(&tv, &tz);
// rt_kprintf("time2:%drn",tv.tv_sec);
if( ret == RT_EOK)
{
rt_memcpy(buf,bufTemp,bufTempNum);
size=bufTempNum;
bufTempNum=0;
return size;
}
else if(ret == -RT_ETIMEOUT)
{
bufTempNum=0;
return 0;
}
bufTempNum=0;
return -1;
}
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void serial_thread_entry(void *parameter)
{
int len=0;
while (1)
{
rt_sem_take(&rx_semRx, RT_WAITING_FOREVER);
if( (bufTemp[0] == 0x01) && (bufTempNum==5) )//这里需要根据实际修改,判断是否接收到了一包数据
{
rt_sem_release(&rx_semRxTimeOut);//数据接收成功
}
}
}
static void serial_threadRx_entry(void *parameter)
{
char ch[LRNGTH]={0};
int len=0;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
rt_memset(ch,0,sizeof(ch));
while ( ( len = rt_device_read(serial, -1, ch, sizeof(ch)) )== 0)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
//rt_kprintf("len=%d,ch=%srn",len,ch);
rt_memcpy(&bufTemp[bufTempNum],ch,len);
bufTempNum += len;
rt_sem_release(&rx_semRx);
}
}
static int Bsp_init(void)
{
rt_err_t ret = RT_EOK;
//char str[] = "hello RT-Thread!rn";
/* 查找系统中的串口设备 */
serial = rt_device_find(SAMPLE_UART_NAME);
if (!serial)
{
rt_kprintf("find %s failed!n", SAMPLE_UART_NAME);
return RT_ERROR;
}
//这里进行串口配置
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
rt_sem_init(&rx_semRx, "rx_semRx", 0, RT_IPC_FLAG_FIFO);
rt_sem_init(&rx_semRxTimeOut, "rx_semRxTimeOut", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
//rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
/* 创建 serial 线程 */
thread = rt_thread_create("serialRx", serial_threadRx_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
return 0;
}
-
星空派(GD)开发板介绍2021-06-26 0
-
移植RT-Thread操作系统到GD32星空派开发板2021-10-13 0
-
GD32F4系列芯片移植RTOS Demo工程 GD32F407移植FreeRTOS GD32F407移植RT-Thread2022-06-07 0
-
基于GD32F310开发板在rt-thread上添加finsh及其shell功能2022-11-08 0
-
如何将RT-Thread系统移植到GD32F427上呢2022-12-13 0
-
GD32F450的开发板工程RT系统启动错误如何解决呢?2023-02-21 0
-
关于GD32F450系列Cortex®-M4 内核MCU的分析和介绍2019-10-22 7539
-
记录——基于 RT-Thread 实现 USB 虚拟串口2021-12-02 845
-
RT-Thread移植到GD32F150系列MCU2021-12-07 657
-
RT-Thread开发GD32F450添加spiflash外设的步骤2023-08-07 2181
-
梁山派GD32F450/470-RT-Thread Nano移植(二)2023-09-25 2027
-
rt-thread studio新建gd32f450工程2023-09-28 1794
-
RT-Thread开发GD32F450添加adc外设2023-10-08 1503
-
RT-Thread开发GD32F450使用scons添加新的文件夹2023-10-08 910
全部0条评论

快来发表一下你的评论吧 !
