

步进电机的工作原理
工业控制
描述
1 基础知识
步进电机工作时平面抛图如下:

图中每个箭头间隔是步进电机的一个步进角,每输入一个脉冲,电机就会转动一个步进角,不同的电机转动的步进角是不一样的。
对于步进电机,有计算公式:旋转角=步进角*脉冲数。
失步:转矩过大或有高速脉冲,超过了电机允许范围,则不仅电机无法按照一个脉冲一个步进角进行转动。
最大自启动频率:静止的空载步进电机,在没有失步的情况下能够启动的最大输入频率。
最大连续响应频率:已启动的电机,在没有失步的情况下能够连续旋转的最大输入频率。
步进电机的相数:电机内部的线圈组数。
从结构上分类:PM(Permanent Magnet,永磁)式,VR(Variable Reluctance,可变磁阻)式,HB(Hybrid,混合)式 PM。
2 变磁阻式步进电机原理
变磁阻式步进电机是最简单的一种步进电机。
其内部转动结构如下:
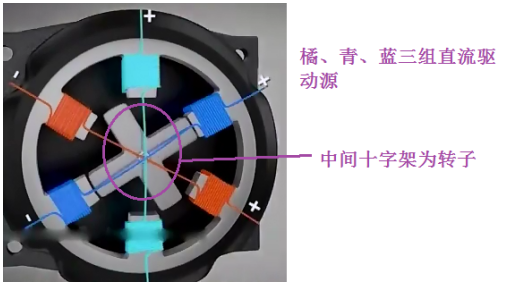
有六个定子齿部,三个分离的直流源进行驱动,转动部分为转子。
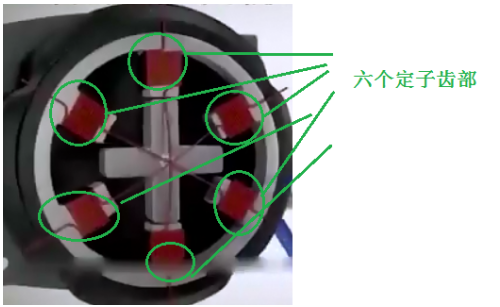
转子采用钢制薄片堆叠而成(为了防止涡流的产生)。转子只有4个齿,成180°的两个齿是一对,定子有4个齿部,成180°的两个齿是一对,这样子的设计能够使每次只有一对转子齿部对上定子的齿部。
以下看转动过程:
初始位置,A线圈进行通电,线圈产生磁场吸住转子的一对齿部。
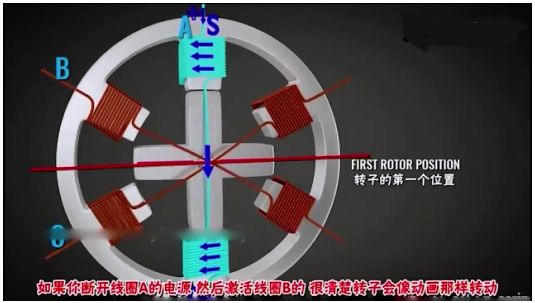
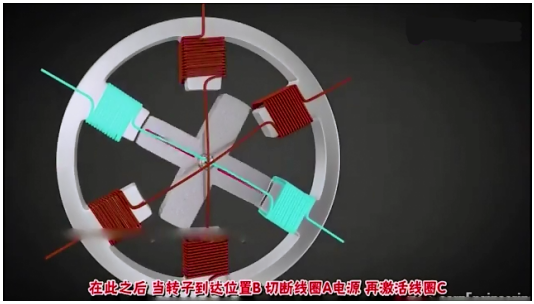
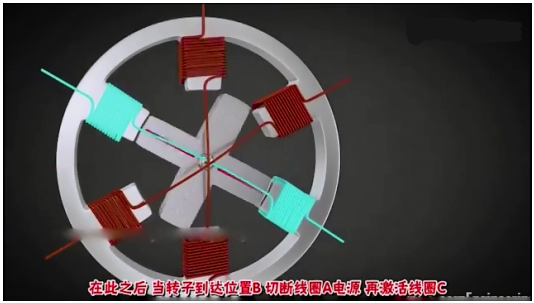
A线圈断电,B线圈通电,则转子水平轴的一对齿部将受B线圈的磁场吸引,顺时针转动30°。
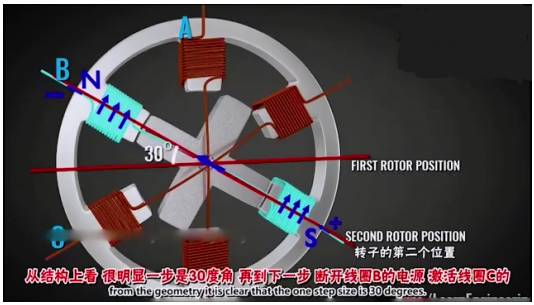
同理,当B线圈断电后,C线圈通电,那么转子又会重新绕顺时针转30°。
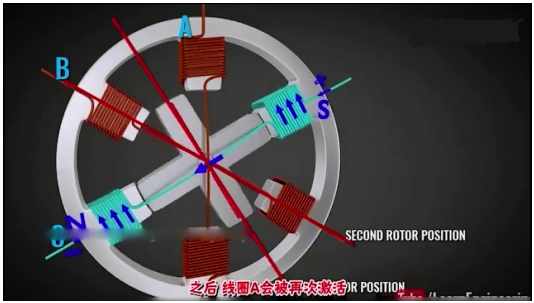
那么,下一次转动就是C线圈断电,A线圈通电,转子齿部重新与A线圈相合。重复四次后,转子将转动一圈。转子的转动是因为转子由金属做成,在线圈通电后,转子会找到最小磁阻的位置,那就会有一对转子齿部与线圈相吸合。
从上述的描述,转子转一步是30°,那么,说明此电机在此种驱动模式下的步进角是30°。该步进电机通过改变控制方式,也可以将步进角改为15°。
我们可以看到,初始位置A/B线圈通电时,转子状态如下:
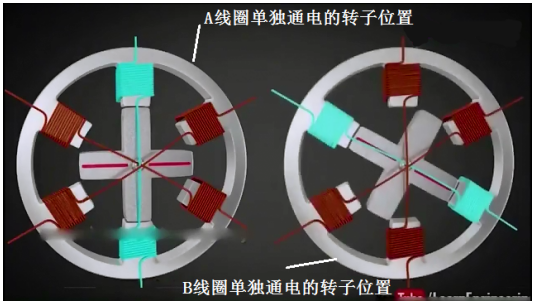
若A线圈通电的同时,给B线圈通电,那么,转子会处在A和B线圈通电时位置的中间位置。
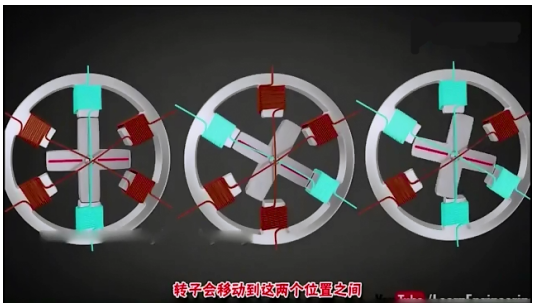
那么此刻,转子的转动角度就是15°,此时断开A线圈的通电,保留B线圈通电,那么转子就会转去与B线圈吸合,再转15°。
此时,C线圈通电,则转子会转到B,C线圈中间,转动15°:
那么同理,B线圈断电,保留C线圈,那么转子就又与C线圈吸合,重新转动15°,之后一直通过这种单线圈-双线圈的循环,可将步进电机改为15°的步进角进行驱动,此种驱动方式称为半步进。
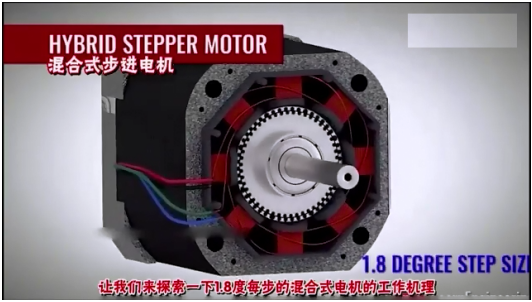
3 混合式步进电机
最常见和最常用的步进电机是混合式步进电机,以1.8°每步的步进电机进行介绍。
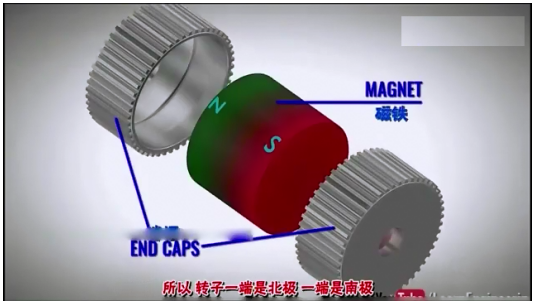
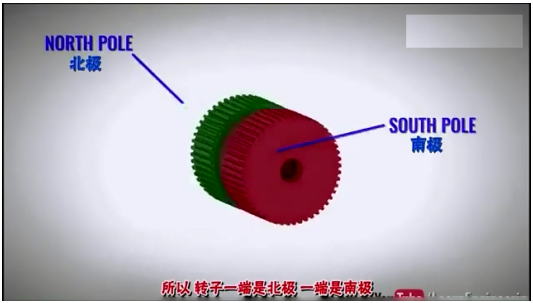
此电机的转子由一个磁芯和两个帽箍组成,具有南极和北极之分。
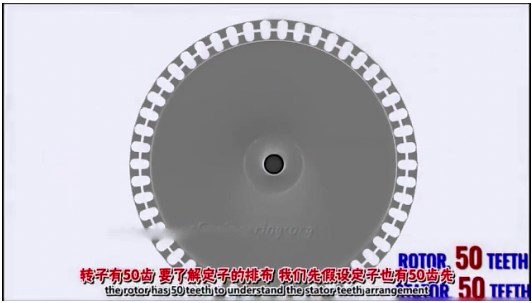
此种电机的步进精度取决于转子和定子之间的巧妙分布。1.8°的电机转子齿数有50个,这是确定的,那么如何理解定子的齿数和分布,先假设定子也有50个齿。
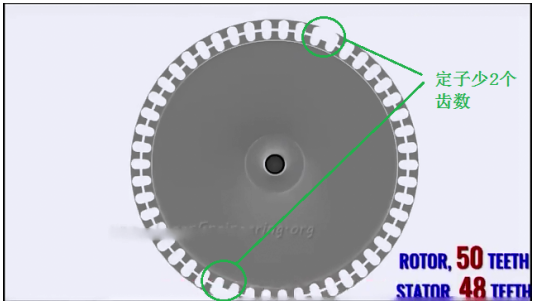
事实上,定子齿数是要比转子齿数少的,这里实际有48个。
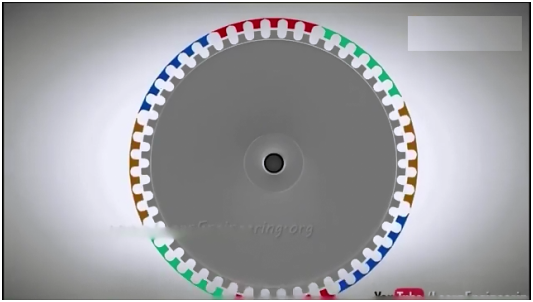
将这48个齿数分成4组,分别为绿,黄,蓝,红。
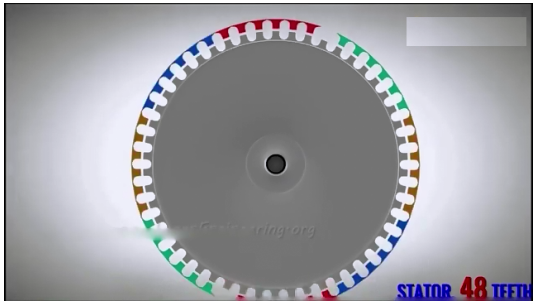
绿色组齿部移动到与转子齿部半对齐的位置,黄色组的齿部移动到完全与转子齿部完全错位,蓝色组齿部移动到与转子齿部半对齐的位置,红色组齿部原位不动。简单的说,就是一组完全对齐,一组完全错位,两组半对齐。
以下是在电机上的剖面图,转子正对你的那一面为南极,绿色是A线圈组,称为A相,黄色为B线圈组,称为B相,两个线圈组是相对独立的线圈组。
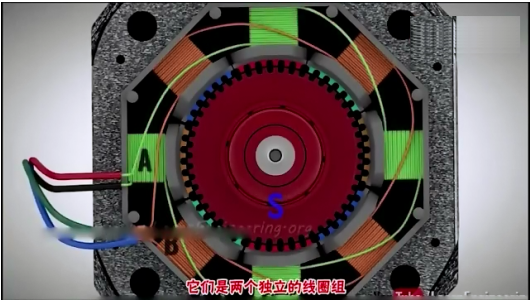
A相线圈通电时,上下两个线圈在定子上形成N极,吸住转子,此时转子不动,若此时A相断电,B相上电,那么,转子将运动。
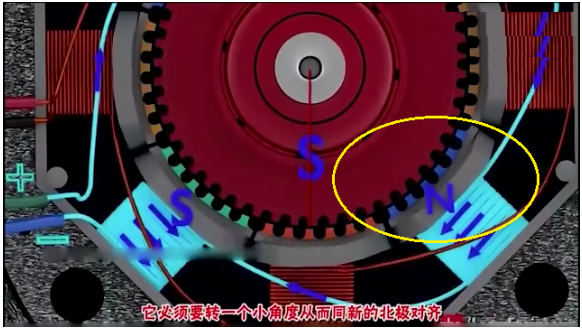
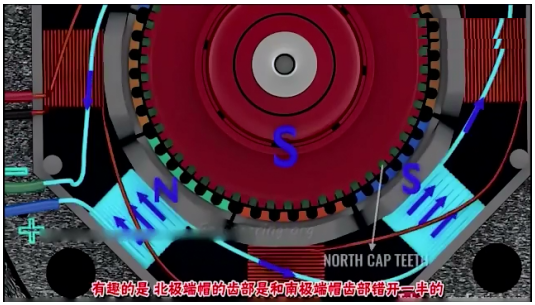
转动的角度为1/4个齿,1个齿角度为360°/100=3.6°,则转动脚为1.8°。下一次到A相线圈通电时,继续转动一个步进角1.8°,如此循环,步进电机受控转动。同时,北极的转子齿部排列与南极的刚好错开,这样就能保证两边都受控。
-
浅谈怠速步进电机的工作原理2016-01-26 0
-
步进电机的工作原理是什么?2021-07-08 0
-
步进电机是什么工作原理?有哪些分类?应用场景是什么?2021-10-19 0
-
磁阻式步进电机的工作原理2009-05-06 4318
-
VID29系列步进电机的工作原理2010-01-09 3499
-
步进电机的工作原理2017-01-03 1151
-
步进电机的工作原理及使用特点_步进电机在包装机械中的应用2018-07-11 4679
-
浅谈步进电机的工作原理2021-06-12 5167
-
两相步进电机的工作原理2021-07-20 10513
-
反应式步进电机的工作原理是什么2021-08-04 6204
-
一文了解步进电机的工作原理2022-10-17 5109
-
步进电机的基本工作原理2023-02-24 4613
-
步进电机的工作原理介绍2024-08-29 393
全部0条评论

快来发表一下你的评论吧 !
