

服务机器人的核心技术到底有哪些
机器人
描述
服务机器人可视作是我们日常工作中的帮手。服务机器人可出现在我们身边,如家中和花园(例如扫地机器人或割草机),也可出现在专业环境中,接管日常工作以提高效率。尽管终端产品易于使用,但此类设备的硬件是极为复杂的,进而实现流畅的用户友好性操作。电机可用于移动设备,使其能够准确地执行操作。诸如防撞或房间建模等高级功能则需要内置雷达及传感器。机器人搭载的高级模型将利用学习算法实现智能路径规划。用户可从这些功能中获得诸多便利,如缩短任务完成时间。
比如上图,这类机器人其实是服务机器人最基础的雏形。他们均具备一定程度的自主能力,可在相应的环境内运动并执行预期任务,在家庭或者专业环境中提供高水平的帮助和简便性。
那么,服务机器人主要能做什么?服务于什么样的人群和场景呢?这里可以分为3大类:
1) 医疗用服务机器人(B端产品):智能采血机器人,隔离病房巡诊机器人,消杀机器人
2)商用服务机器人(B端产品):送餐机器人,引导类机器人,服务机器人,安保巡逻机器人等
3)家用服务机器人(C端产品):工具类机器人(如智能扫地机器人),教育型机器人等
其中,商用服务机器人近年来发展迅速,日渐成熟。不过,在服务过程中它还会遇到各种问题。比如,以配送服务机器人为例,它的作用主要就是进行快递包裹配送的人工智能机器人。然而配送型服务机器人难点之一就是在需要进行上下楼的条件下,如何控制电梯,自动进入到电梯并到达相应的楼层。
机器人的基本架构通常包括中央处理器 (CPU)、电源/电池管理单元、电池充电器、无线通信 (COM) 模块、人机界面 (HMI)、传感器及驱动模块(有刷和无刷电机)。那么,服务机器人的核心技术到底有哪些呢?一张服务机器人的功能模块图你就能立刻知晓:
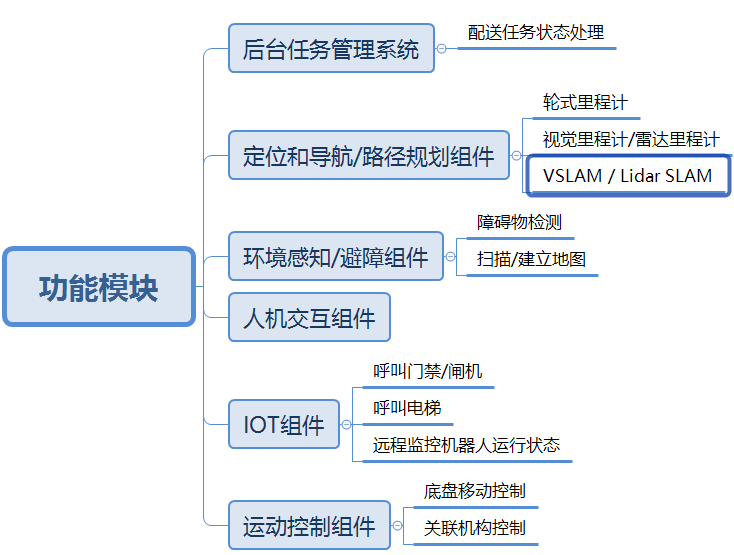
在当前现有服务机器人功能中,人机交互,环境感知和运动控制是三大核心功能。环境感知犹如机器人的眼睛,为机器人的运动控制指路,可以到指定地点,完成指定服务。在服务过程中,人机交互是必不可少的功能。
对于服务机器人而言,交互系统包含了UI界面、面部识别、语音识别、支付系统等等。这是直接面向用户的功能,是“服务”的最直接体现。环境感知和运动控制是分不开的,两者相互配合才可以完成服务。为什么要这样说呢?
机器人想要完成服务,达到指定的地点,就需要精确的运动控制。如何能做到精确,那就要依靠各类传感器。
服务机器人的常规环境感知和控制系统框图如下:
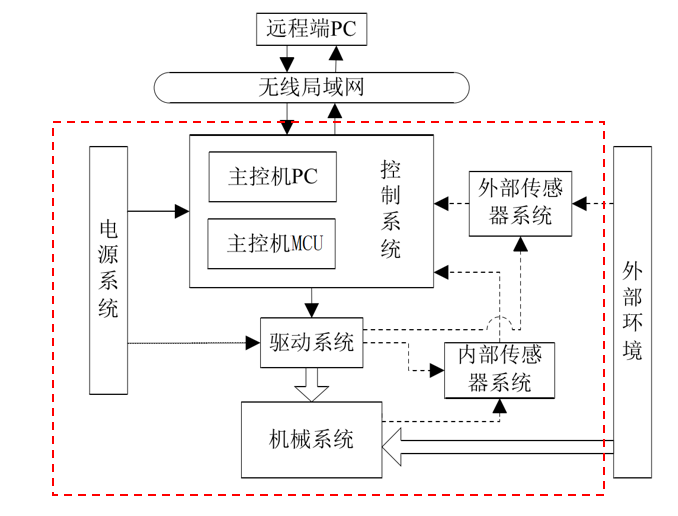
整个系统包含了:机械系统、驱动系统、控制系统、电源系统,以及依靠传感器系统传递的环境参数。
传感器作为机器人的眼睛,不同场景的可实现的功能大同小异,就是让机器人可以“看见”。在整个机器人运动控制系统中,服务机器人的传感器系统常用到下面这些:
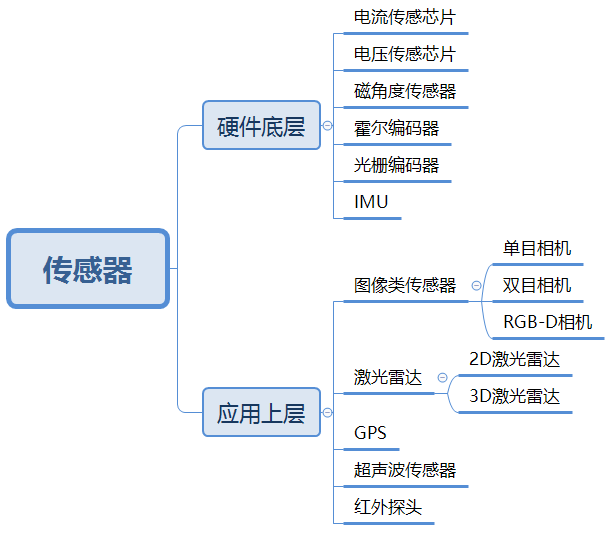
结合控制系统框图,应用上层中的这些传感器可以归纳为外部传感器系统,主要完成两个功能:
1)构建地图:利用激光雷达或相机对三维环境构建二维栅格地图或者三维高精度点云地图等;
2)使用地图:机器人在作业过程中实时计算传感器采集数据,利用子图匹配等算法在已知地图中进行匹配得到定位和障碍物信息。
在环境感知中,主要面临以下问题:
1、高动态环境导致建图失败或者定位失败。机器人构建地图的过程中是依赖环境不变假设,虽然可以通过一定的算法避免动态环境造成的影响,但是并不能完全保证机器人能够正常工作。
2、地图的长期生命周期问题,通常如果环境变化,需要机器人重新进行建图作业,否则无法工作。
3、高精度的点云地图依赖昂贵的激光雷达传感器和复杂的算法以及大量的计算资源,高精度的点云地图难以获得。
而在硬件底层的传感器系统中,也有各种问题。硬件底层的内部传感器主要是负责驱动系统的信息收集,多以电机运动信息为主,包括电机转速、电机转角等。当前大部分无刷电机均自带编码器,由于无刷电机转速快的特点,能达到每分钟几万转速,对编码传感器的精度和稳定性都有很高的要求,传统的光栅编码器已经越来越不能适应无刷电机高速的特点,光电编码器逐渐由磁编码器替代。
编辑:黄飞
-
全球首款智慧眼核心技术智能家庭服务机器人2015-03-02 0
-
核心部件依赖进口 PCB抄板助力国内机器人突出重围2015-11-30 0
-
我国机器人企业与国外机器人企业到底有多大差距2017-07-10 0
-
基于深度学习技术的智能机器人2018-05-31 0
-
什么是服务机器人2021-09-17 0
-
智能服务机器人在家庭安防中的核心技术2011-03-24 1325
-
简介10项机器人领域的核心技术2017-09-29 756
-
浅谈十项机器人核心技术2019-01-01 2888
-
智能机器人三大核心技术(二)2019-09-23 7010
-
智能机器人需要解决哪三大核心技术问题才能突破2020-02-06 14568
-
中国服务机器人到底有多大的市场2020-09-12 640
-
国内外工业机器人的差距到底有多大?工业机器人有什么样的应用2020-10-06 4921
-
斯帝尔机器人专注柔性打磨机器人的核心技术2020-09-30 2113
-
电话机器人有多厉害?电话机器人的五大核心技术2021-07-16 1103
全部0条评论

快来发表一下你的评论吧 !
