

i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(上)
描述
RT-Thread 是国人自主研发的开源实时操作系统(RTOS),RT-Thread Nano 是极简版的硬实时内核,内存占用小,移植简单。VGLite 是 NXP 提供的轻量级 2D 图形 API,基于 FreeRTOS 实现。
文章分为上、下两篇,将手把手教您移植。上篇对 RT-Thread Nano 内核与 Finsh 组件进行移植,下篇则教您改写 SDK 中的 VGLite 代码以将其适配到 RT-Thread Nano 中。
所有工作已上传至 Github ,欢迎有兴趣的读者学习交流!
一硬件准备
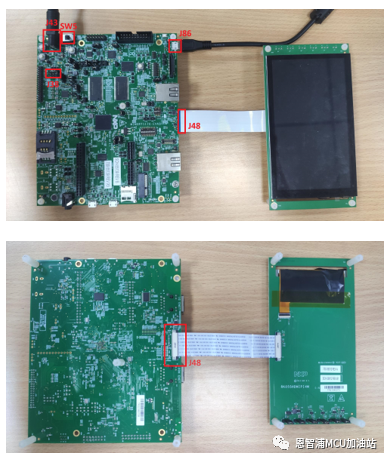
本文采用 i.MX RT1170 EVKB 开发板与 RK055HDMIPI4M 显示屏,显示屏与开发板 J48 相连,使用 MIPI DSI 协议通信。连接 5V 输入到开发板 J43, 跳线连接 J38 的 1-2,电源开关为 SW5 ,Debug 时使用 Micro-USB 数据线连接 PC 与开发板的 J86. 总体连接图如下:
二软件准备
下载RT-Thread Nano源码并解压。构建并下载 RT1170 SDK。
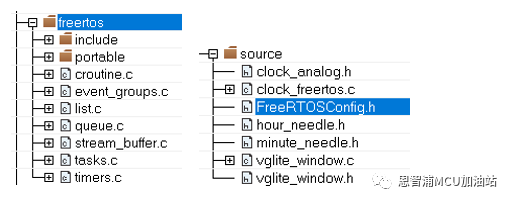
解压 SDK 压缩包,使用 IAR 打开 /boards/evkbmimxrt1170/vglite_examples/clock_freertos/cm7/iar/clock_freertos_cm7.eww,后续以此为例进行移植。
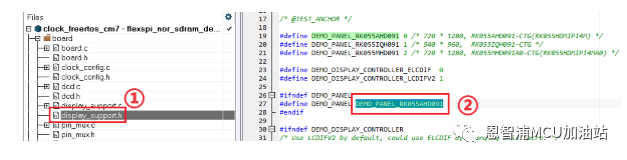
需在工程 /board/display_support.h 中确保当前屏幕与 DEMO_PANEL 宏定义的型号一致。
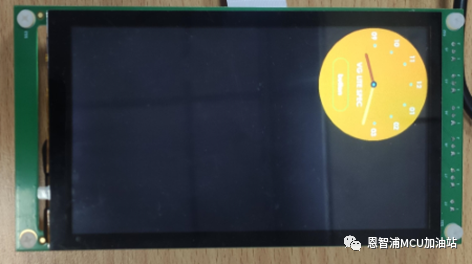
编译并运行,正常运行时屏幕显示时钟图像,且串口持续输出帧数信息。
NOTE: 本文中使用的 SDK 版本为 v2.14.0,RT-Thread Nano 为 v3.1.3,IAR 为 9.40.1。
三Free RTOS 移除
首先删除原工程中的 freertos 组与/source/FreeRTOSConfig.h 文件。
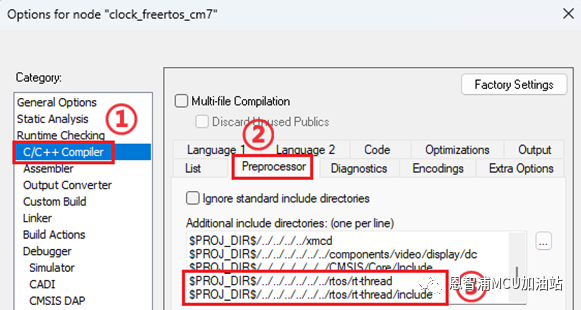
 右键工程名点击 Options... 选项,在下图界面可删除 FreeRTOS 头文件路径:
右键工程名点击 Options... 选项,在下图界面可删除 FreeRTOS 头文件路径: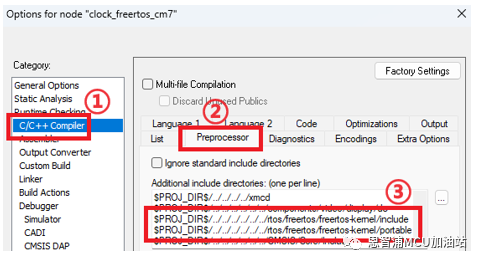 全局搜索代码中以下 FreeRTOS 相关头文件,注释或删除:
全局搜索代码中以下 FreeRTOS 相关头文件,注释或删除:
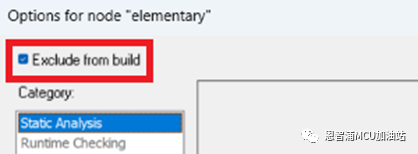
#include "FreeRTOS.h" #include "task.h" #include "semphr.h" #include "queue.h"因原有的 VGLite 源文件仍会调用已移除的 FreeRTOS 函数,会导致编译报错。可先右键以下文件后点击 Options... 选项,选择 Exclude from build 排除编译。
/board/display_support.c 与 .h 文件
/board/vglite_support.c 与 .h 文件
/source/vglite_window.c 与 .h 文件
/elementary/ 组
/vglite/ 组
/video/ 组
既然已移除了 FreeRTOS,那么文件名中的"freertos" 也可更换掉, 比如"clock_freertos.eww" 可改为"clock_rtthread.eww"。 此外,.ewd、.ewp、.eww 文件中有关 "freertos" 的文本也可用记事本等搜索替换。
四移植 RT-Thread Nano 内核
1. 添加源文件
在 SDK 解压包的 /rtos/ 中创建 rt-thread 文件夹,并将 RT-Thread Nano 解压包中以下文件复制到 /rtos/rt-thread/ 文件夹内。
/rt-thread/ 文件夹中的 include、libcpu、src 文件夹
/rt-thread/bsp/ 文件夹中的 board.c 与 rtconfig.h 文件

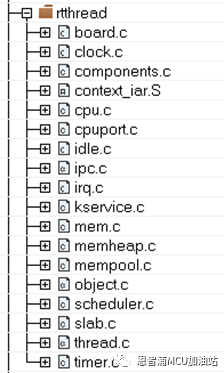
打开 clock_rtthread.eww,新建 rtthread 组并添加以下文件:
/rtos/rt-thread/src/ 文件夹中所有文件
/rtos/rt-thread/libcpu/arm/cortex-m7/
文件夹中 cpuport.c 与 context_iar.S 文件(RT1170 芯片为 Cortex-M7 架构,若对其他开发板移植,需选取芯片对应架构的文件)
/rtos/rt-thread/ 文件夹中的 board.c,也可添加 rtconfig.h 文件方便 RT-Thread 配置
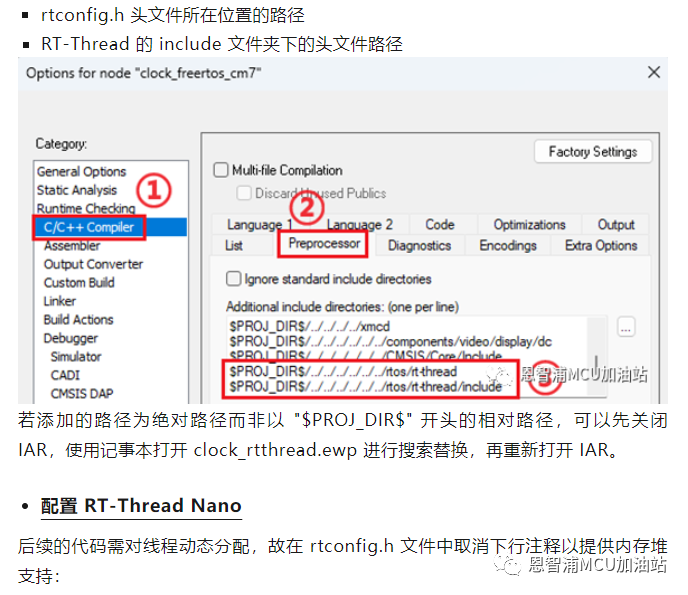
2. 添加头文件路径
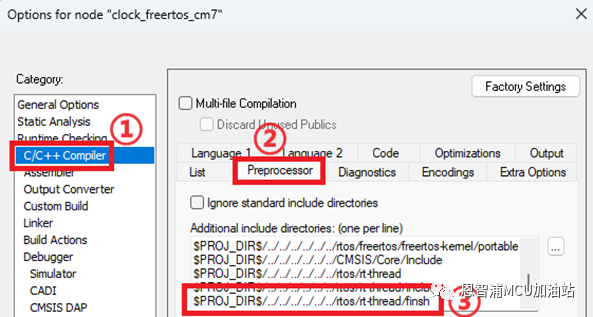
IAR 中右键工程名点击 Options... 选项,进入下图界面添加以下路径:
rtconfig.h 头文件所在位置的路径
RT-Thread 的 include 文件夹下的头文件路径
若添加的路径为绝对路径而非以 "$PROJ_DIR$" 开头的相对路径,可以先关闭 IAR,使用记事本打开 clock_rtthread.ewp 进行搜索替换,再重新打开 IAR。
3. 配置 RT-Thread Nano
后续的代码需对线程动态分配,故在 rtconfig.h 文件中取消下行注释以提供内存堆支持:
#define RT_USING_HEAP同时,需在工程 /rtthread/board.c 中增大内存堆,更改 RT_HEAP_SIZE 宏为 (1024 * 10):
#define RT_HEAP_SIZE (1024 * 10)
其余 RT-Thread 配置将在下篇讲解,上篇主要聚焦内核移植所用到的配置。
4. 编写测试应用程序
编写一个简单的 RT-Thread 代码以测试移植的内核。备份工程中 /source/colock_freertos.c的原有代码后,更改为以下测试代码:
#include "rtthread.h"
#include "fsl_debug_console.h"
#include "pin_mux.h"
#include "clock_config.h"
#include "board.h"
static void test_thread(void *parameter) {
while (1) {
PRINTF("Hello RT-Thread
");
rt_thread_mdelay(500);
}
}
int main(void) {
/* Init board hardware. */
BOARD_ConfigMPU();
BOARD_BootClockRUN();
BOARD_InitLpuartPins();
BOARD_InitDebugConsole();
rt_thread_t test_thread_handle = rt_thread_create("test_thread", test_thread, RT_NULL, 512, 1, 1);
if (test_thread_handle != RT_NULL)
rt_thread_startup(test_thread_handle);
}
编译并运行,若开发板每隔 500 毫秒通过串口发送 "HelloRT-Thread", 则说明内核移植成功,恭喜您已完成了近一半的路程!
五移植 Finsh 控制台组件到 RT1170
Finsh 是 RT-Thread 的命令行组件(shell),提供一套可以在命令行调用的操作接口。此组件是可选项,若不需要可跳过此章节。
Finsh 移植分为两部分:添加 UART 控制台实现打印输出、添加 Finsh 组件实现命令输入。
1. 添加 UART 控制台实现打印输出
UART 初始化
原工程中,UART 等初始化在 main() 函数中完成。移植 RT-Thread Nano 后,可将初始化转移到工程 /rtthread/board.c 中的 rt_hw_board_init() 函数中,如下所示。
#include#include ...... void rt_hw_board_init() { /* Init board hardware. */ BOARD_ConfigMPU(); BOARD_BootClockRUN(); BOARD_InitLpuartPins(); BOARD_InitDebugConsole(); BOARD_InitMipiPanelPins(); ...... }
rt_hw_console_output() 实现
RT-Thread 使用 rt_kprintf() 调用 rt_hw_console_output() 函数打印输出,此函数位于工程 /rtthread/kservice.c 文件中,需要自己实现。可以直接包含原工程/utilities/fsl_debug_console.h 文件, 使用 PRINTF 宏输出。不过打印已以 ' ' 结尾,故还需输出 ' ',以完成回车与换行。实现后的函数如下:
#include...... RT_WEAK void rt_hw_console_output(const char *str) { PRINTF(str); PRINTF(" "); }
UART 输出测试
更改 PRINTF 宏为 rt_kprintf() 函数,以此测试是否正常输出。更改的代码如下,原先的初始化操作已转移到了工程/rtthread/board.c 的 rt_hw_board_init() 函数中。
#include "rtthread.h"
static void test_thread(void *parameter) {
while (1) {
rt_kprintf("Hello RT-Thread");
rt_thread_mdelay(500);
}
}
int main(void) {
rt_thread_t test_thread_handle = rt_thread_create("test_thread", test_thread, RT_NULL, 512, 1, 1);
if (test_thread_handle != RT_NULL)
rt_thread_startup(test_thread_handle);
}
编译并运行,若开发板仍持续通过串口发送 "Hello RT-Thread",则可正常输出。
2. 添加Finsh组件实现命令输入
源文件添加

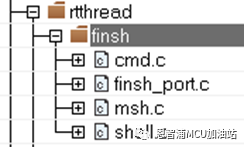
Finsh 源文件位于 RT-Thread Nano 解压包的/rt-thread/components/finsh/ 内,将 finsh 文件夹复制到 SDK 解压包的/rtos/rt-thread/ 中。
在工程 /rtthread 组中新建 finsh 组,添加复制的 finsh 文件夹中所有 .c 文件。
IAR 中右键工程名点击 Options... 选项,添加 finsh 文件夹路径。
使能 Finsh
在 rtconfig.h 中包含添加的 Finsh 头文件:
#include "finsh_config.h"
rtconfig.h 与 finsh_config.h 中存在部分重复的宏,可注释掉 finsh_config.h 中重复的宏以避免编译时的警告。
rt_hw_console_getchar() 实现
也需手动实现工程 /rtthread/finsh/finsh_port.c 中的函数 rt_hw_console_getchar() 用于命令输入。
注释原有的 rt_hw_console_getchar() 函数中的 #error 开头语句以停止报错。可用原工程 /utilities/fsl_debug_console.h 文件中的 GETCHAR 宏实现输入,函数如下:
#include...... RT_WEAK char rt_hw_console_getchar(void) { int ch = -1; ch = GETCHAR(); return ch; }
Finsh 控制台测试
编译并运行,使用 PUTTY 等工具打开串口。按下 tab 键或输入 help 命令并回车,会输出以下信息。否则说明移植失败,需再检查上述步骤。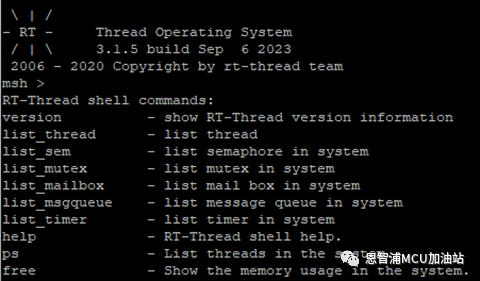
六小结
本篇主要介绍了如何移植 RT-Thread Nano 内核与 Finsh 控制台,为下篇讲解移植 VGLite 到 RT-Thread Nano 提供了内核基础。
审核编辑:汤梓红
-
野火电子基于RT-Thread的i.MX RT1052 EVK Pro板卡特点介绍2018-07-16 9066
-
i.MX RT1170自定义引导加载程序,如何在i.MX RT处理器上完成?2023-05-17 0
-
恩智浦i.MX RT1170开创GHz MCU时代2021-03-22 3481
-
恩智浦i.MX RT1170在将该系列带上了更高的层面2021-05-18 3770
-
【国产MCU系列】在 HK32F030 上移植 RT-Thread Nano2022-01-25 623
-
基于 Keil MDK 移植 RT-Thread Nano2022-01-26 817
-
如何创建RT-Thread Nano工程2022-03-19 3783
-
RT-Thread文档_野火 I.MX RT1052上手指南2023-02-22 418
-
RT-Thread文档_正点原子 I.MX RT1052号令者上手指南2023-02-22 416
-
RT-Thread文档_RT-Thread SMP 介绍与移植2023-02-22 604
-
I.MX RT1170配套PMIC PF5020使用方法2023-04-01 2343
-
i.MX RT1170评估套件快速入门:这份保姆级教程,请收藏!2023-05-12 2123
-
基于NXP微控制器i.MX RT1170的多人体实时检测算法和系统2023-10-26 1042
-
i.MX RT1170:VGLite移植RT-Thread Nano过程讲解(下)2023-11-09 916
-
恩智浦i.MX RT1170 uSDHC eMMC启动时间2024-08-08 569
全部0条评论

快来发表一下你的评论吧 !
