

Unity与ROS的Service话题介绍
描述
Service话题
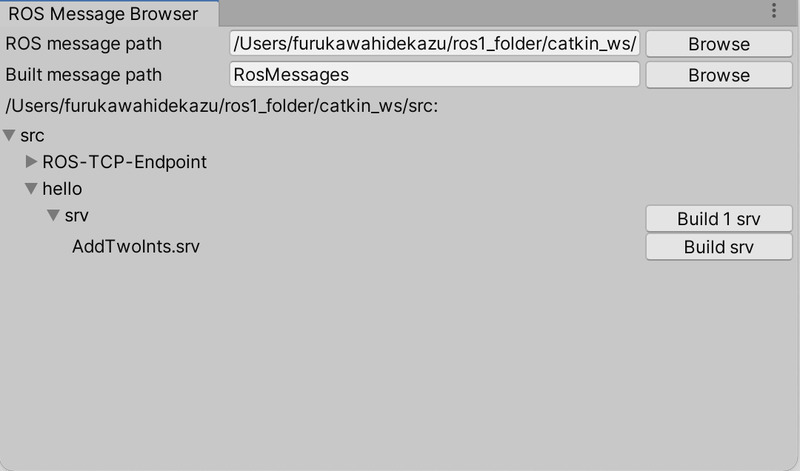
首先使用同样的方法可以完成srv文件的导入
服务端的实现。Hierarchy窗口的“+→Create”Empty”创建空GameObject,命名为“AddTwoIntsServer”,添加新的脚本“AddTwoIntsServer”
using UnityEngine;
using Unity.Robotics.ROSTCPConnector;
using Unity.Robotics.ROSTCPConnector.ROSGeometry;
using AddTwoIntsRequest = RosMessageTypes.Hello.AddTwoIntsRequest;
using AddTwoIntsResponse = RosMessageTypes.Hello.AddTwoIntsResponse;
public class AddTwoIntsServer : MonoBehaviour
{
void Start()
{
// 向ROS连接注册Service服务
ROSConnection.GetOrCreateInstance().ImplementService<
AddTwoIntsRequest, AddTwoIntsResponse >("add_two_ints", AddTwoIntsCallback);
}
private AddTwoIntsResponse AddTwoIntsCallback(AddTwoIntsRequest request)
{
AddTwoIntsResponse response = new AddTwoIntsResponse();
response.sum = request.a + request.b;
return response;
}
}
客户端的实现。Hierarchy窗口的“+→Create”Empty”创建空GameObject,命名为“AddTwoIntsClient”,添加新的脚本“AddTwoIntsClient”,编辑如下。
using UnityEngine;
using Unity.Robotics.ROSTCPConnector;
using AddTwoIntsRequest = RosMessageTypes.Hello.AddTwoIntsRequest;
using AddTwoIntsResponse = RosMessageTypes.Hello.AddTwoIntsResponse;
public class AddTwoIntsClient : MonoBehaviour
{
ROSConnection ros;
void Start()
{
// 向ROS连接注册Service服务
ros = ROSConnection.GetOrCreateInstance();
ros.RegisterRosService< AddTwoIntsRequest, AddTwoIntsResponse >("add_two_ints");
// 请求生成
AddTwoIntsRequest request = new AddTwoIntsRequest(1, 2);
// 请求发送
ros.SendServiceMessage< AddTwoIntsResponse >("add_two_ints", request, AddTwoIntsCallback);
}
void AddTwoIntsCallback(AddTwoIntsResponse response)
{
print("1 + 2 = " + response.sum);
}
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ROS与RPLIDAR结合使用说明及问题汇总2017-09-07 0
-
ROS与STM32是如何进行通信的2021-08-11 0
-
ROS2的安装与使用 精选资料推荐2021-08-30 0
-
ROS话题消息是什么意思呢?怎样去使用ROS话题消息呢2022-02-14 0
-
RT-Thread实时操作系统与ROS2是怎样进行通信的2022-04-01 0
-
Unity开发者Arm指南-特效图形技术介绍2023-08-02 0
-
UNITY 平台介绍2016-12-25 1077
-
ROS的含义与机器人操作系统ROS的介绍2017-09-26 1541
-
ROS与STM32通信2021-12-24 788
-
ROS基本介绍2023-05-19 7396
-
ROS/ROS 2 介绍2023-05-19 4331
-
Unity与ROS链接介绍2023-11-17 1000
-
如何将消息导入Unity2023-11-17 529
-
ROS核心框架介绍2023-11-21 992
-
ROS通信接口机制介绍2023-12-01 843
全部0条评论

快来发表一下你的评论吧 !
