

TogetherROS目标检测运行方法
描述
接下来,我们就运行一个更为直观的案例——目标检测。
在这个案例中,需要大家找一个USB的相机,连接到旭日X3拍的USB接口上。
在运行这个例程之前,需要确认两点:
1.有一个USB相机已经连接到了旭日X3派板子上;
2.有一个HDMI的显示器也连接到了旭日X3派板子上,它主要用于显示后续的图像检测的效果。
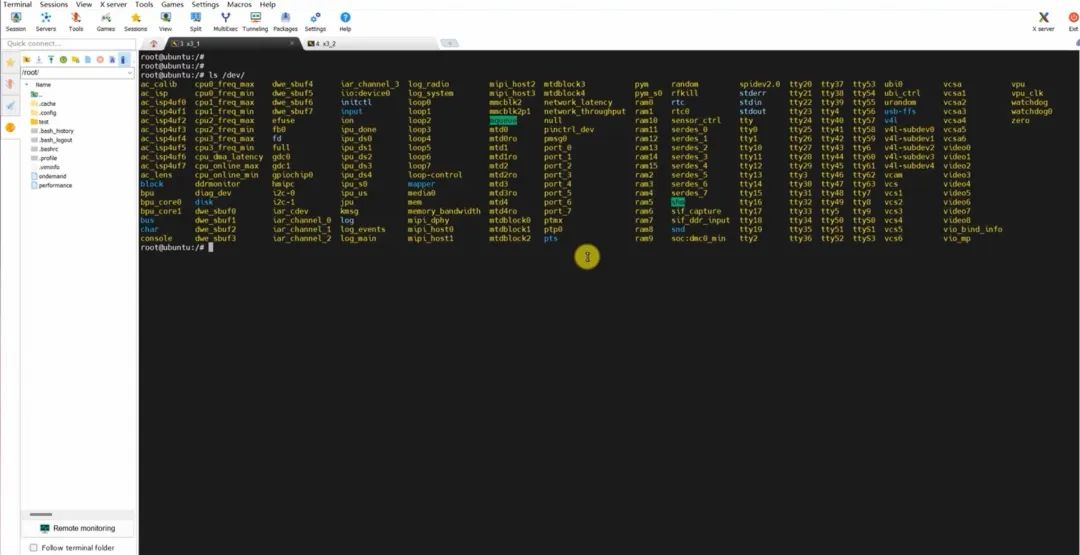
要确认USB相机已经正确连接到开发板,可以在终端输入命令“ls - dv“查看当前设备号,默认把USB相机识别为vedio8。
如果当前列表里能找到vedio8就说明相机被成功识别到了。
输入以下命令运行例程:
** cd /app/ai_inference/02_usb_camera_sample/ ** python3 ./usb_camera_fcos.py
代码第一行,02例程的功能是通过相机动态采集图像,并对图像里的目标物体进行实时识别。
代码第二行,我们用python3来运行例程usb_camera_fcos.py,它的目标识别的功能是通过我们板卡中CPU的AI引擎来实现的。
我们输入以上两行代码,就开始驱动相机、并对相机里的图像做动态识别了。
此时如果有连接HDMI的显示器,就可以在显示器里看到动态识别的效果。
我们可以调整USB相机镜头的范围,去拍一些杯子、电脑、显示器等等,都可以把对应的目标物体识别到,并把对应的物体用彩色框给框出来;
在框的左上角,就是识别到物体的名称、以及它识别的概率值了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
MATLAB的行人目标检测的方法有哪些?2023-08-23 0
-
基于部件的自动目标检测方法研究2010-06-23 611
-
运动目标检测方法的对比分析和仿真实现2011-12-23 476
-
基于海天线提取的红外小目标检测方法2012-04-20 1331
-
机场场面监视雷达目标检测新方法2017-01-07 745
-
基于仿生视觉系统的运动目标快速检测方法2017-11-10 985
-
基于GPU的并行化运动目标检测方法的研究2017-11-15 659
-
一种非静止背景下的运动目标检测方法2017-11-15 646
-
基于子矩阵波束的目标检测方法2017-11-28 615
-
解析在目标检测中怎么解决小目标的问题?2021-04-26 6263
-
基于卷积神经网络的雷达目标检测方法综述2021-06-23 898
-
基于改进SSD的车辆小目标检测方法2022-02-08 1364
-
目标检测EDA方法有哪些 eda和pcb的区别2023-07-20 1882
-
TogetherROS Bot相机驱动方法2023-11-24 440
-
基于深度学习的小目标检测2024-07-04 882
全部0条评论

快来发表一下你的评论吧 !
