

电子罗盘中应用了哪些传感器?
MEMS/传感技术
描述
目前, 导航系统在汽车、航海、航空等领域已经得到广泛的应用。电子罗盘是导航系统不可缺少的重要组成部分。
GPS导航定位的缺陷
1、虽然GPS在导航、定位、测速、定向方面有着广泛的应用,但由于其信号常被地形、地物遮挡,导致精度大大降低,其信号可用性仅为60% ,甚至不能使用。
产生不精确定位的原因包括:
①多路径效应:建筑物对GPS信号的反射;
②阴影:城市中高楼与高楼之间形成的“峡谷”内、浓密的植被下,信号接收效果较差;
③在隧道、地下停车厂造成的信号失锁;
④在接收信号差的地区延长了初始化时间;
⑤一些动态影响,如汽车大幅度增速与减速等。
以上原因都会导致GPS无法提供任何位置或者定位精度陡然下降。
2、在静止的情况下,GPS也无法给出航向信息。
高精度电子罗盘可以对GPS信号进行有效补偿,保证导航定向信息100%有效,即使是在GPS信号失锁后也能正常工作,做到“丢星不丢向”。
3、安全及可靠性风险。
美国出于自身利益上的考虑,从不承诺不实施SA干扰和区域关闭,这更给GPS用户带来很大疑惑和担心。因此,将GPS与电子罗盘相结合,二者相互补充,组合使用是导航领域的理想选择。例如:美国虽然其完全独立掌握GPS 的卫星资源,但为了使系统更加可靠,使导航信息100%有效,其M1坦克及其它一些重要装备上仍加装了C100电子罗盘。
相对于其他导航手段而言,地磁导航起步得比较晚。在20世纪60年代中期,美国的E2systems公司提出了基于地磁异常场等值线匹配的MAGCOM(Magnetic ContourMatching)系统, 70年代获得测量数据后,系统进行了离线实验。20世纪80年代初,瑞典的Lund学院对船只的地磁导航进行了实验验证,实验中将地磁强度的测量数据与地磁图进行人工比对,确定船只的位置,同时根据距离已知的两个磁传感器的输出时差,确定船只的速度。
地磁场模型与地磁图是研究地磁导航制导技术的基础,地磁场建模和地磁图的精确程度是决定地磁导航技术是否可行的关键因素。
地磁场和航向角
地球本身具有磁性,所以地球和近地空间之间存在着磁场,叫做地磁场。地磁场的强度为0. 3 至0. 6 高斯,其大小和方向随地点(甚至随时间) 而异。地球本身具有磁性,所以地球和近地空间之间存在着磁场,叫做地磁场。地磁场的强度为0. 3 至0. 6 高斯,其大小和方向随地点(甚至随时间) 而异。
如图所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来。
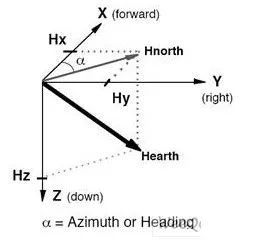
实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以计算出航向角。当罗盘水平旋转的时候,航向角在0—360度之间变化。
早期,采用机械式磁罗盘。机械式磁罗盘主要由若干平行排列的磁针、刻度盘和磁误差校正装置组成,磁针固装在刻度盘背面,在地磁影响下,磁针带刻度盘转动,用以指出方向。随着适宜于地磁场测量的磁通门传感器及AMR传感器的出现,磁电子罗盘逐渐问世。这种电子式的磁罗盘相对于机械式磁罗盘具有一些突出的优点,如抗冲击性、抗震性,能够对杂散磁场进行补偿,输出电信号,可方便地与其它电子设备组成应用系统。
电子罗盘原理
三维电子罗盘由三维磁阻传感器、双轴倾角传感器和MCU构成。
三维磁阻传感器用来测量地球磁场,倾角传感器是在磁力仪非水平状态时进行补偿;MCU处理磁力仪和倾角传感器的信号以及数据输出和软铁、硬铁补偿。
三维磁阻传感器采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在该方向上的地磁场强度。向前的方向称为x方向的传感器检测地磁场在x方向的矢量值;向左或Y方向的传感器检测地磁场在Y方向的矢量值;向下或Z方向的传感器检测地磁场在Z方向的矢量值。每个方向的传感器的灵敏度都已根据在该方向上地磁场的分矢量调整到最佳点,并具有非常低的横轴灵敏度。传感器产生的模拟输出信号进行放大后送入MCU进行处理。
1、当仪器与地表面平行时,仅用地磁场在X和Y的两个分矢量值便可确定方位值。
2、当仪器发生倾斜时,方位值的准确性将要受到很大的影响,该误差的大小取决于仪器所处的位置和倾斜角的大小。为减少该误差的影响,采用双轴倾角传感器来测量俯仰和侧倾角,这个俯仰角被定义为由前向后方向的角度变化;而侧倾角则为由左到右方向的角度变化。电子罗盘将俯仰和侧倾角的数据经过转换计算,将磁力仪在三个轴向上的矢量在原来的位置“拉”回到水平的位置。
标准的转换计算式如下:
Xr=Xcosα+Ysinαsinβ-Zcosβsinα
Yr=Xcosβ+Zsinβ
其中,Xr和Yr为要转换到水平位置的值,X、Y、Z为三个方向的矢量值,α为俯仰角,β为侧倾角。
电子罗盘的主要特点
1、三轴磁阻效应传感器测量平面地磁场,双轴倾角补偿。
2、高速高精度A/D转换。
3、内置温度补偿,最大限度减少倾斜角和指向角的温度漂移。
4、内置微处理器计算传感器与磁北夹角。
5、具有简单有效的用户标校指令。
6、具有指向零点修正功能。
电子罗盘主要用途
1、电子罗盘主要用于辅助GPS导航及在静止状态获取航向,具体包括加速度和方向的定位、倾角测量等功能。
2、加速度和方向的定位。电子罗盘应用三轴磁阻传感器测量平面地磁场,双轴倾角补偿,可以和GPS配合可以做盲区导航,和GOOGLE地图配合可以做导航,还可以和加速度配合做三维定位,还可以根据电子罗盘的读数,地图自动旋转到用户方便读取的方向,让显示的地图方向始终按照你的行进方向自动变换,也就是可以把它当做专业的指南针使用,说的简单点也就是加速度和方向的定位。
3、倾角测量。三维的电子罗盘,不仅具有指南针功能,还可以实现倾角的测量,和陀螺仪类似,站在一个斜坡上,可以计算出这个斜坡的角度,不过最重要的就是都可以在开飞机的时候使用,不干扰飞机飞行。
电子罗盘的缺陷
电子罗盘的原理是测量地球磁场,但若使用的环境中有除了地球以外的磁场且这些磁场无法有效屏蔽时,那么电子罗盘的使用就有很大的问题,这时只能考虑使用陀螺来测定航向了。
电子罗盘分类
电子罗盘按照有无倾角补偿可以分为:
平面电子罗盘
平面电子罗盘要求用户在使用时必须保持罗盘的水平,否则当罗盘发生倾斜时,也会给出航向的变化而实际上航向并没有变化。
虽然平面电子罗盘对使用时要求很高,但如果能保证罗盘所附载体始终水平的话,平面罗盘是一种性价比很好的选择。
三维电子罗盘
三维电子罗盘集成三轴磁通门传感器,在平面电子罗盘基础上加入了倾角传感器,如果罗盘发生倾斜时可以对罗盘进行倾斜补偿,这样即使罗盘发生倾斜,航向数据依然准确无误。通过中央处理器实时解算航向,以及使用三轴加速度计对大范围内的倾斜角进行航向补偿,保证罗盘在倾斜角度高达±90°也能提供高精度的航向数据。
电子罗盘按照传感器的不同分为:
磁阻效应传感器
根据磁性材料的磁阻效应制成。磁阻传感器的灵敏度和线性度已经能满足磁罗盘的要求,各方面的性能明显由于霍尔器件,使它在某些应用场合能够与磁通门竞争。但是其固有的缺点翻转效应缺点使得磁阻效应传感器在集成入微系统时的强的脉冲电流将威胁系统中的微处理器等其它威廉希尔官方网站 的可靠性。
霍尔效应传感器
根据半导体材料的霍尔效应制成。优点是体积小,重量轻,功耗小,价格便宜,接口威廉希尔官方网站 简单,特别适用于强磁场的测量。缺点是有灵敏度低,噪声大,温度性能差等,一般都是用于要求不高的场合。
磁通门传感器
根据磁饱和法原理制成,利用被测磁场中铁磁材料磁芯在交变磁场的饱和励磁下其磁感应强度与磁场强度的非线性关系来测量弱磁场。从三者的比较来看,目前基于磁电阻传感器的电子罗盘具有体积小、响应速度快等优点,优势明显,是电子罗盘的发展方向。
电子罗盘的结构组成
一个传统的电子罗盘系统至少需要一个三轴的磁力计以测量磁场数据,一个三轴加速计以测量罗盘倾角,通过信号条理和数据采集部分将三维空间中的重力分布和磁场数据传送给处理器。处理器通过磁场数据计算出方位角,通过重力数据进行倾斜补偿。这样处理后输出的方位角不受电子罗盘空间姿态的影响。
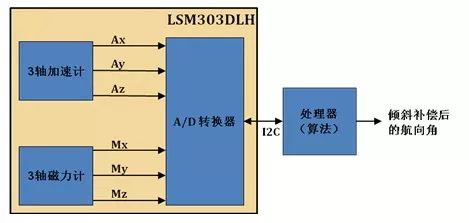
以意法半导体LSM303DLH实现成本低、性能高的电子罗盘为例。将上述的加速计、磁力计、A/D转化器及信号条理威廉希尔官方网站 集成在一起,仍然通过I2C总线和处理器通信。这样只用一颗芯片就实现了6轴的数据检测和输出。
软件方面同样以意法半导体LSM303DLH电子罗盘为例,基于Android的电子罗盘功能软件结构如下图所示:
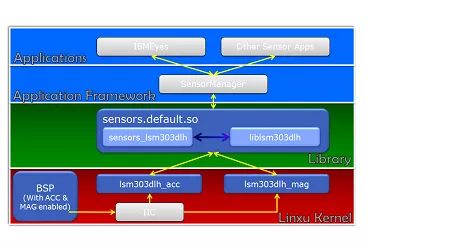
核心驱动层:Linux Kernel Driver (LSM303DLH_ACC + LSM303DLH_MAG),实现了从IIC或串口读取经过数模转换和精度补偿计算的航向角,完成电子罗盘硬件设备访问。
硬件无关层:HAL Library(Sensors_lsm303dlh + Liblsm303DLH) for sensors.default.so,实现了对电子罗盘设备的驱动封装访问。
Framework层:实现Android系统中框架层的传感器管理模块对电子罗盘设备的管理。
应用层:经过library 的计算,上层的应用可以很轻松的运用由Android定义由Library提供的航偏角信息进行应用程序的编写。基于电子罗盘的应用有Android的Skymap、IBMeye等。
电子罗盘的应用
电子罗盘应用广泛,高精尖的航天、航空、航海都离不了它。
罗外电子罗盘(Compass),看似遥远,但其实就在我们身边,您手上的智能手机有指南针功能吧,对,它就是采用了电子罗盘传感器。其实,不单单如此,它可以说已经渗透到了我们生活的方方面面。
那么在我们的生活中,它有哪些和我们密切相关的用处呢?
手机导航
我们最最熟悉的就是手机导航啦,拿着手机,地图跟着你的方向转,这就是电子罗盘的功劳。
妈妈再也不用担心我找不到北啦~~
人肉导航
(哈,吓一跳吧),其实是这样的:生活中有很多的路痴,每天都在为出门烦恼。为解决此难题,俄罗斯一小伙将电子罗盘植入体内,用来感知方向。
这位小伙名叫丹尼尔.雷特金,他购入了一套价值250美元(折合人民币1720.75元)的电子罗盘设备。在纹身师的帮助下,他成功把这个罗盘植入体内。每当他转向北面的时候,罗盘就会发生振动,帮助他辨别方向。不过这个电子罗盘的待机时间只有一天左右,所以雷特金几乎每天都要把它取下来充电。
车载导航
目前的车载导航仪许多都整合了GPS和电子罗盘。特别是经常进行越野活动的车主更是需要选择带电子罗盘的导航仪或多功能电子罗盘。由于GPS导航在一些地形复杂地区信号受到遮蔽,无法满足正常的导航功能,而电子罗盘具有不需要接收信号的特点,可辅助导航。
此外还有多功能电子罗盘,这种罗盘一般集GPS气压测高仪和磁力线罗盘为一体,可以在高山等特殊环境下及时反映气压和高度的细微变化,而且在屏蔽状态下也能显示运动方向。无需配带罗盘、角规、测高仪等繁琐物件,方便用户在户外的工作旅行。
停车位检测
现在很多的路边停车和智能停车场,采用地磁方式检测停车位是否有车。在没有车或者车辆静止后停车位的磁场相对稳定;而当有车开到停车位以及离开时,会造成磁场的变化。
地磁检测器埋于停车位位置,通过RF将检测结果报告给附近的中继器,最终信息汇总到停车位管理系统。整套系统最核心的,当然是地磁检测部分。compass传感器基本决定了检测的可靠程度。路边的自动收费停车位就是靠它!
无人机导航定位
电子罗盘作为无人机产品的重要组件,承载着为无人机引导绝对方位的功能。在无人机中,电子罗盘提供关键性的惯性导航和方向定位系统的信息。
机器人导航定位
如今机器人大家已经不陌生了,各种玩具机器人,家庭服务机器人、医疗服务机器人、点餐机器人等等都已出现在大家的生活当中。
一般机器人利用加速传感器和陀螺仪,基本可以描述设备的完整运动状态。但是随着长时间运动,也会产生累计偏差,不能准确描述运动姿态,比如操控画面发生倾斜。电子罗盘利用测量地球磁场,通过绝对指向功能进行修正补偿,可以有效解决累计偏差,从而修正设备的运动方向、姿态角度、运动力度和速度等。
审核编辑:黄飞
-
车用磁阻传感器式电子罗盘系统的开发2009-11-26 0
-
基于磁感式和MEMS加速度传感器的电子罗盘设计2016-11-05 0
-
ST集成传感器方案实现电子罗盘功能2018-11-02 0
-
车载电子罗盘的软件滤波算法有什么优点?2019-10-18 0
-
电子罗盘功能怎么实现?2019-11-05 0
-
六轴组合传感器KMX62-1031满足电子罗盘对地磁传感器的需求2020-07-07 0
-
基于AMR和加速度传感器ADXL202的电子罗盘的抗干扰设计2010-08-19 1020
-
基于磁阻传感器和加速度计的电子罗盘设计2013-09-25 1571
-
简析倾角传感器在三维电子罗盘中的基本作用2017-09-21 997
-
电子罗盘的使用原理是什么2020-04-28 5177
-
电子罗盘的分类与特点2020-05-07 2549
-
电子罗盘是什么_电子罗盘工作原理2021-02-01 15012
-
电子罗盘磁场传感器模块资料(含产品说明书、示例程序)2022-01-19 689
-
磁传感器之电子罗盘详解2022-02-24 8382
全部0条评论

快来发表一下你的评论吧 !
