

SaberRD基于JMAG电机模型的电动汽车动力系统仿真(二)
电子说
描述
本文介绍了在不同抽象层次上有效模拟电动汽车动力系统的技术,仿真目标从驾驶周期数小时内的全局效率和热分析,到逆变器开关特性和损耗的纳秒细节。这些技术可以用来优化电机和逆变器控制,验证电能质量(THD和损耗),并模拟故障。
本文分为两部分,第一部分阐述威廉希尔官方网站 设计思路以及在Saber RD中进行的选型与建模;第二部分阐述SaberRD基于JMAG电机模型搭建的四个不同抽象级别的威廉希尔官方网站 以及在SaberRD中进行一系列的仿真验证。
概述
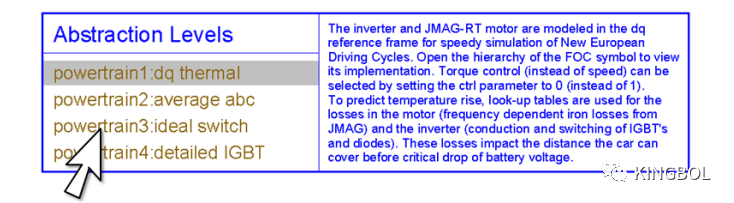
*电动汽车动力总成设计示例(从SaberRD开始页面安装)包含4个抽象级别,每个抽象级别都允许最有效地分析动力总成的特定行为。
*通过单击导航符号上的属性powertrain1到powertrain4,可以方便地浏览不同的抽象级别。
01
Powertrain 1:dq thermal
*powertrain1提供最大模拟速度,允许长时间模拟驾驶周期。在图1中,正在重复新欧洲驾驶循环(NEDC),直到电池耗尽。相当于在60秒内模拟7个小时的驾驶。采用dq模型对电机和逆变器进行仿真,仿真速度快。dq模型(也称为基频模型)通过使用平均技术并仅保留相位和幅值信息,抽象了电压的高频开关性质和电流的正弦性质。这种抽象水平非常适合于研究长时间的热效应。由于温度升高和影响汽车在充电之间的距离,逆变器和电机的损耗在查找表中被准确地计算出来。
*电机和逆变器的损耗是频率相关的(频率是逆变器的开关频率和电机的转子速度)。逆变器的损耗取决于温度,确保充分的电热耦合。然而,此时在运动模型中不存在温度依赖性。
*逆变器和电机产生的热流提供一个简化的热网络,连接到20°C环境温度源。在全局变量下,电池组的温度也设置为环境温度20°C。图1显示了真实的速度、温度和电池电压在重复驾驶循环中的波形。模拟预测NEDC的射程为225公里,而制造商报告的射程为200公里。略微乐观的预测的一种可能性是,仿真模型中的制动是100%再生的,没有耗散成分。然而,事后看来,额外的车辆载重,有5名乘客被忽略了。考虑到这一点,实现的射程约为201公里。实际上,混合动力汽车动力系统的仿真模型或虚拟原型可以很好地预测实际性能。请注意,此初始测试假设新制造的电池组具有100%的额定容量。锂离子电池从制造时就开始老化,所以这种退化也应该被考虑在内。
通过将暂态分析信号列表设置为All Signals(…: )并在vsi_dqx中绘制信号的瞬时效率,可以很容易地获得电机和逆变器的瞬时效率。Vsi和jmag_pmsm_dqx.pmsm:fea_pmsm_dqx.pmsm。逆变器的平均效率为79%,电机的平均效率为85%。电机和逆变器信号以及车辆性能与电池组能量的关系可从Analyze_system_performance实验中获得。
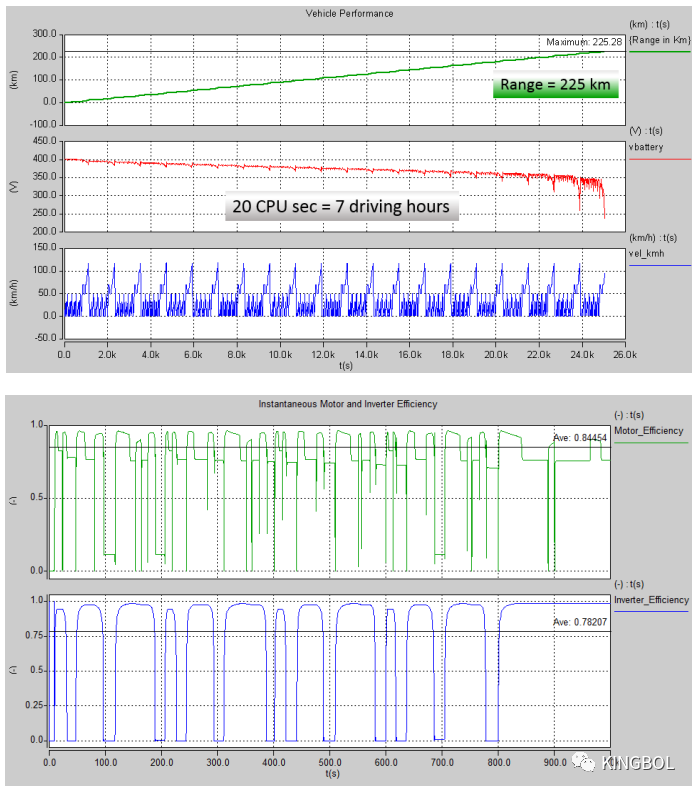
图1 New European Driving Cycle仿真结果
*一级动力总成示例有一个“老化性能”实验,可将电池组的温度和年龄分布与系统的其他部分进行对比。这提供了一个假设,测试电池对系统性能和标称的影响,但也包括寿命和温度的高到低极端。实验结果如图2所示。要在SaberRD中运行该操作,用户只需要在Simulate选项卡下选择该实验。一旦选择并启动,电池和车辆性能的模拟结果将自动提供。如图3和4所示。
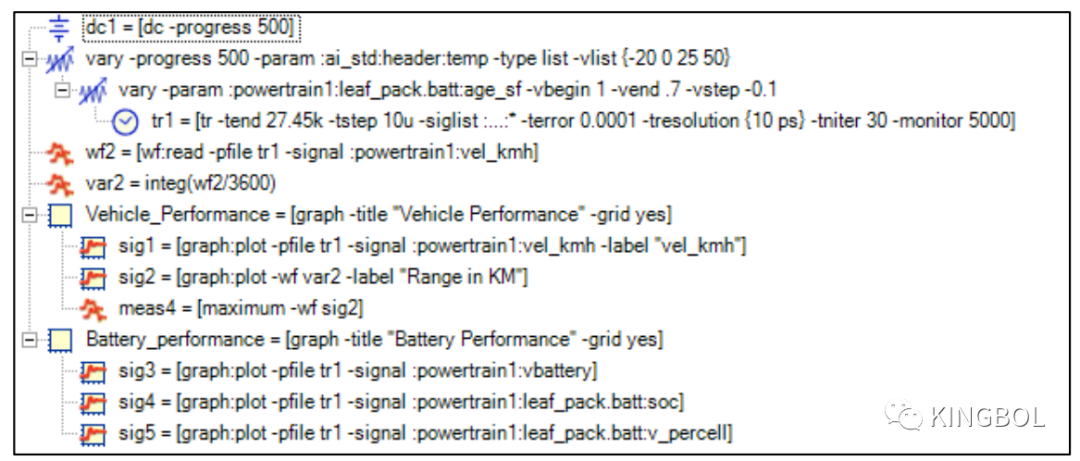
图2 Battery pack temperature aging sweep experiment
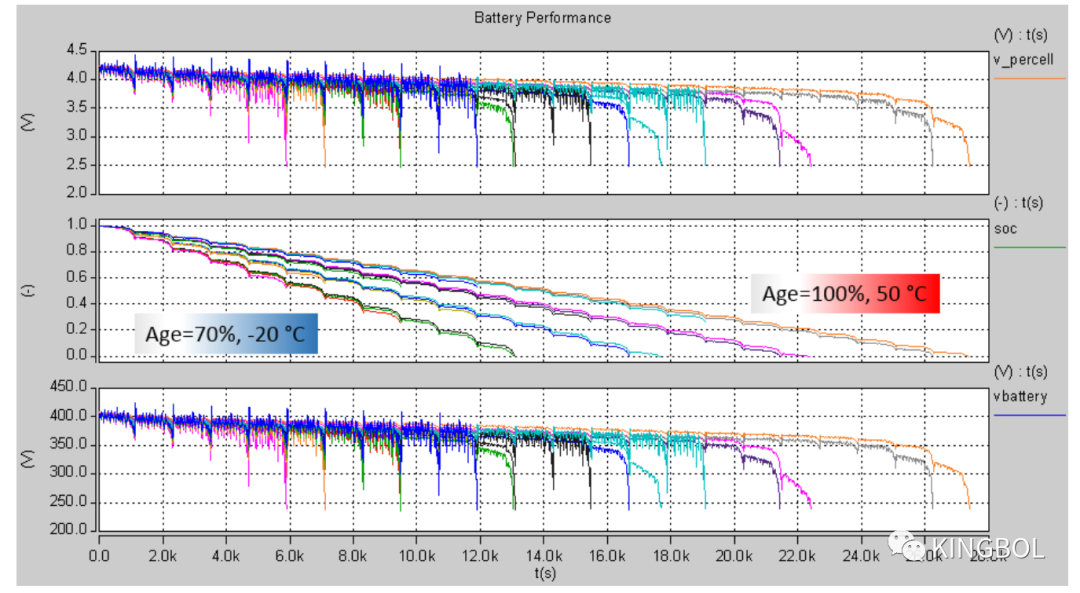
图3 Battery pack performance simulation results
*电池寿命从100%(新电池)、90%、80%和70%进行扫描。图3显示了电池性能随年龄和温度的变化。例如,在高温和标称温度下,分别为50°C和25°C,当SOC达到零时,电池组可以完全放电至完全耗尽。然而,当电池组温度下降到0°C和-20°C时,可以利用的电池容量就少得多。
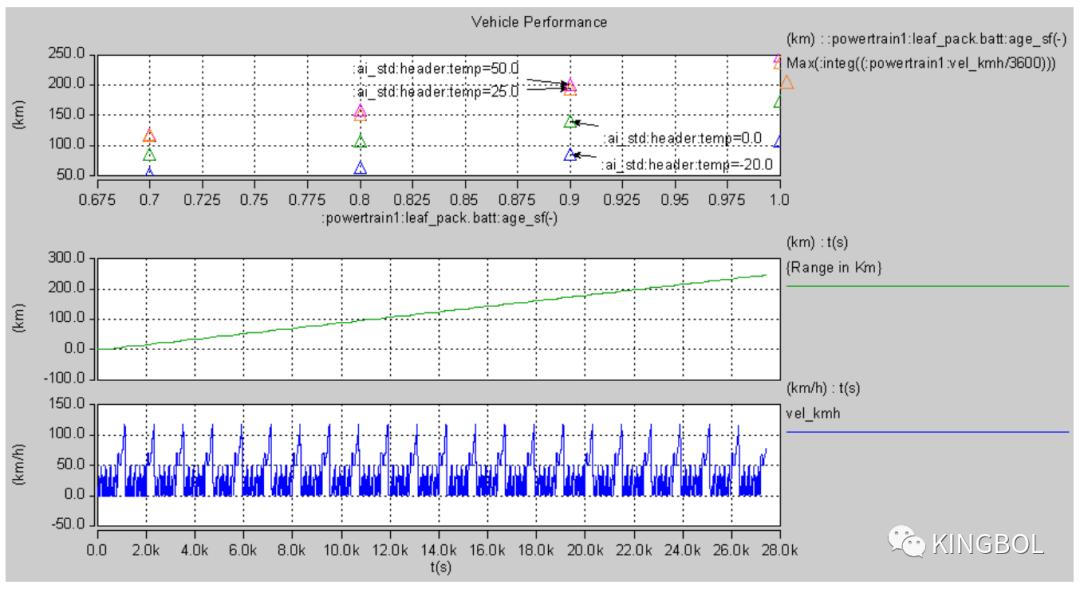
图4 Vehicle performance simulation results
*图4展示了给定新欧洲驾驶循环下电池寿命和温度的车辆续航性能汇总。当电池包老化10%时,其容量约为原来的90%,在标称温度为25°C时,行程从175 Km下降到-20°C时的75 Km。这样的研究对于有效地验证一般性能是非常有益的,因为虚拟原型可以作为可执行的功能规格书。
02
Powertrain 2:average abc
*在powertrain2中,使用非开关三相逆变器(vsi_abc),在同步频率产生正弦电压,而不是在dq thermal(powertain 1)中产生直流电压。模拟速度不如powertain1,因为没有抽象重复正弦分量,但它明显快于powertrain3,其中电压是不连续的,脉宽是调制的。powertrain2提供了速度和精度之间的妥协,适合研究电机驱动的机电动力学。特别是,它允许观察由电机的空间谐波引起的转矩波动。图5显示了车辆在平坦地形上大约10秒内从0加速到60英里/小时。为了重现这些结果,将load_veh_dyn符号实例的terrain属性设置为所有y值都相等(比如为0)。加载并运行Acceleration_Flat_Terrain实验文件以重现图5所示的结果。
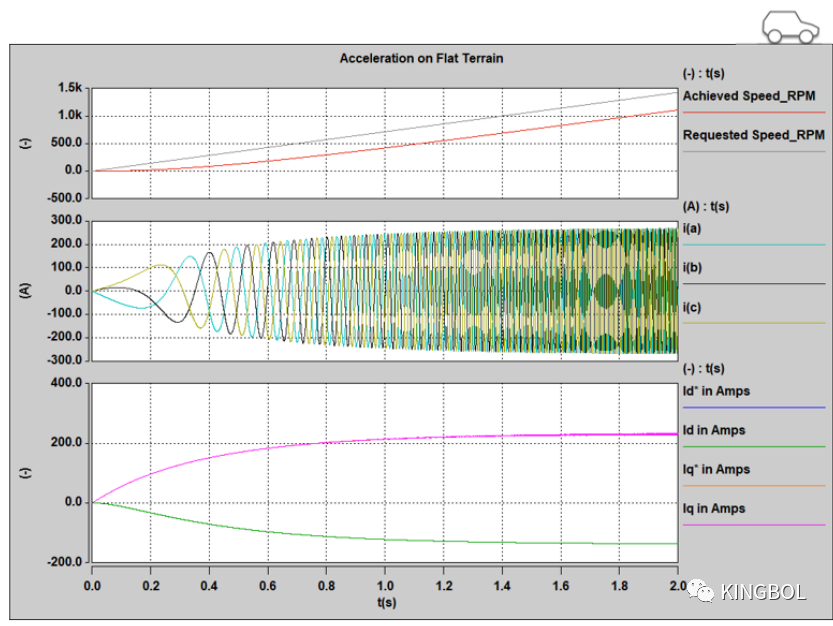
图5 Acceleration on flat terrain
*不出所料,相电流的频率与车速成正比,电流矢量的id分量为负,符合MTPA公式。
*图6显示了不同型号电机获得的转矩波形的细节。再现结果的实验名为Torque_study。
*下面的列表的相关电机模型信息供设计师使用参考:
1.空间谐波精度模式下的JMAG模型
*将rttfile属性设置为“100k_S_D_IV_WithUniformSpacing”
*设置精度属性为sh
运行2秒的瞬态分析,将信号列表设置为:…: (所有信号)
*通过绘制信号来观察齿槽转矩:gear_box_w.gear_box_w1: trq_inp
2.JMAG模型在LdLq精度模式下
*设置精度属性为Idlq
*运行2秒的瞬态分析并绘制图:gear_box_w.gear_box_w1:trq_inp
3.原Saber LdLq PMSM型号(dq3pmsyn)
*将imag pmsm模型替换为dg3pmsyn(来自Saber库),并更新以下属性:rs = 10m;phi_max = 92;lq = 635 u;Id =271u, j=2.27e-2;p = 8
- 运行2秒的瞬态分析并绘制gear_box_w.gear_box_w1:trq_inp
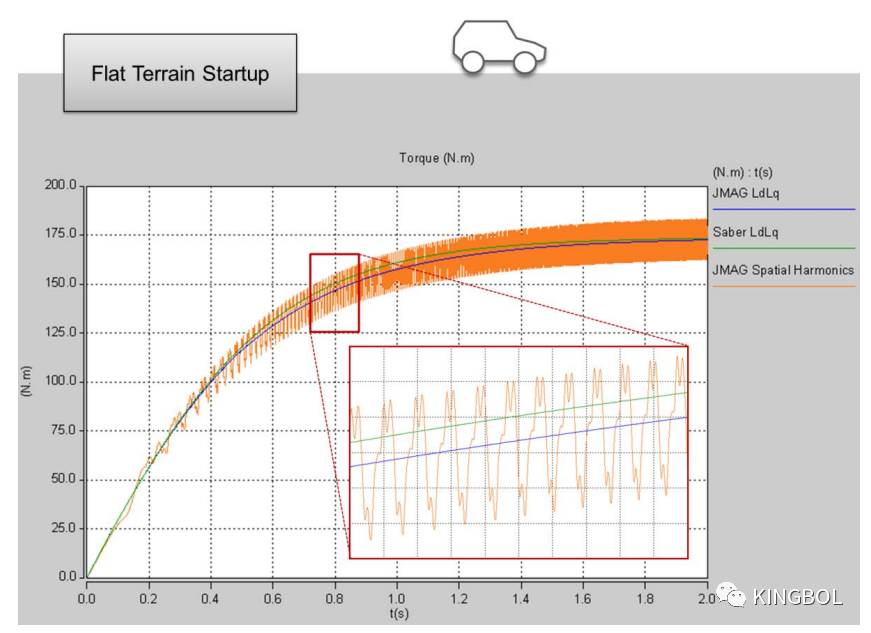 图6 Detail of torque waveform
图6 Detail of torque waveform
*图7显示,电机产生的反电动势在t=5秒左右被钳位到电池电压上。超过这一点,电机在磁通减弱模式下运行,允许速度进一步提高,但需求速度与实现速度之间的不匹配越来越大。仿真还表明,电机电流在达到其最大额定值300A后得到适当的箝位。电流钳位由MTPA块(imax参数)完成。通过选择并运行Flux_Weakening来验证这一点。
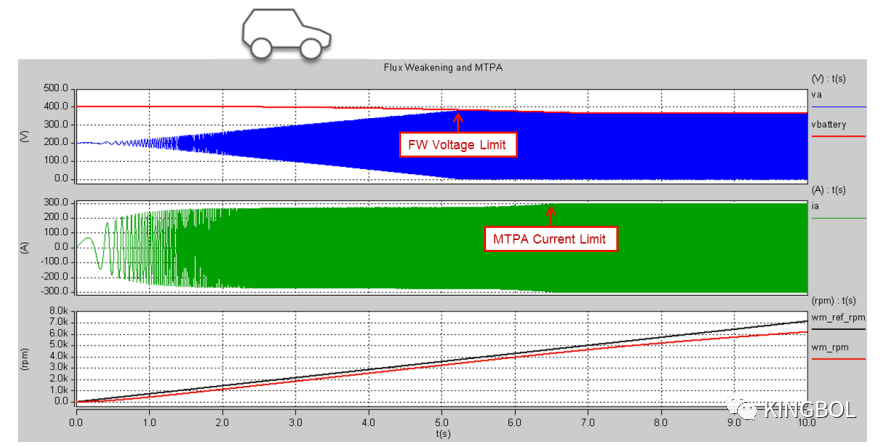
图8 Flux weakening
*图9和10显示了车辆在斜坡地形上的动态。在下坡段,车速超过要求的速度:电机产生负转矩,暂时充当发电机。此时,能量流回电池,从势能转换为动能,磁性,电和最终的化学形式。当转矩过零时,相电流发生反转。
*为了验证这一点,运行名为Sloped_Terrain_Study的实验,查看图9和10所示的信号。
*值得指出的是,汽车的初始位置(x=0)必须是没有呈现斜率的(车辆动力学符号的地形属性中前两点的y值相等)。为了获得直流工作点的解,这是必要的。由于电机启动时没有转速,因此不需要扭矩,因此只有在没有重力(斜率=0)的情况下才能实现静止时作用在汽车上的力的平衡。如果修改地形,需要确保在x=0处是平坦的。
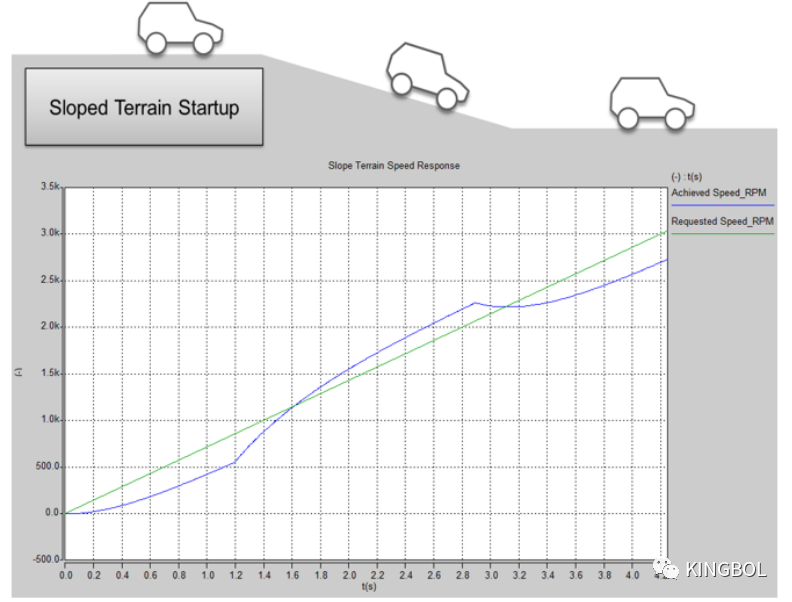
图9 Speed response on sloped terrain
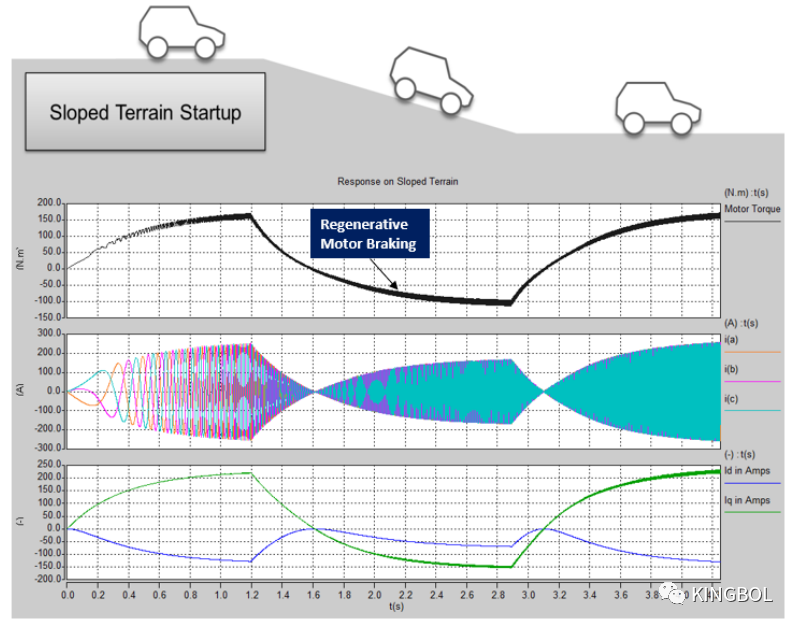
图10 Torque and current responses on sloped terrain
03
Powertrain 3:ideal switch
*powertrain3包括逆变器的PWM操作,导致模拟速度较慢。然而,在这个级别中使用的开关模型(sw1_14_igbt.sin)比powertrain 4的详细半导体模型模拟速度快大约一个数量级。
*sw1_14_igbt.sin是数字控制理想开关sw1_l4.sin与一个额外的反并行copack二极管和一个查找表方案,说明开关损耗。该模型还考虑了IGBT在开启状态下的压降(参数von_igbt)。否则它就像二元电阻ron/roff。
*三种类型的开关损耗包括:IGBT的接通损耗、IGBT的关断损耗和copack二极管的反向恢复损耗。这些损耗在文件中指定eon.ai_dat, eoff.ai_dat 和 err.ai_dat 都包含4列:通过导电开关的电流(安培)(在关断/开断事件之前/之后),通过阻塞开关的电压(伏特)(在开断/关断事件之前/之后),开关温度和与开关事件相关的损耗(焦耳)。
*自瞬态模拟开始以来,开关实例中耗散的总损耗(单位为焦耳)由信号total_dissipated_energy给出(在信号列表层次结构中选择)。该信号对应switching_energy和传导能量信号之和(要查看switching_energy,暂态分析设置Save process/shared variables需要设置为Yes)。
*信号pwrd表示在参数tau指定的一段时间内,开关中消耗的瞬时功率的平均值。
*开关损耗文件中的数据基于后来在powertrain4中使用的英飞凌IGBT FS600R07A2E3的数据表。为了避免查找表函数的异常,重要的是要包括已知损耗为零的点(即在零电压或零电流条件下,开关能量为零)。
*可以导入开关损耗文件的内容,并在表查找(TLU)工具中查看,如图11所示。
*在powertrain3中,控制是在MAST模板(foc_pmsm.sin)中实现的,使用采样的输入信号而不是前面级别的连续信号。此外,这种实现不输出占空比,而是产生逆变器开关事件需要触发的时间,使其更接近真正的MCU。尽管如此,大多数控制操作与powertrain2相同,包括Park和逆Park变换、MTPA、通量削弱、Pl积分和占空比计算。控制与设备之间的通信方案如图12所示。
*默认情况下,采样和开关频率分别为30 kHz和5 kHz(控制和工厂之间的通信频率)。每隔200us,从植物中采样的信号被传递给控制,以计算下一个开关周期中的开关瞬间(在控制对植物的响应中,不可避免地存在一个周期的延迟)。
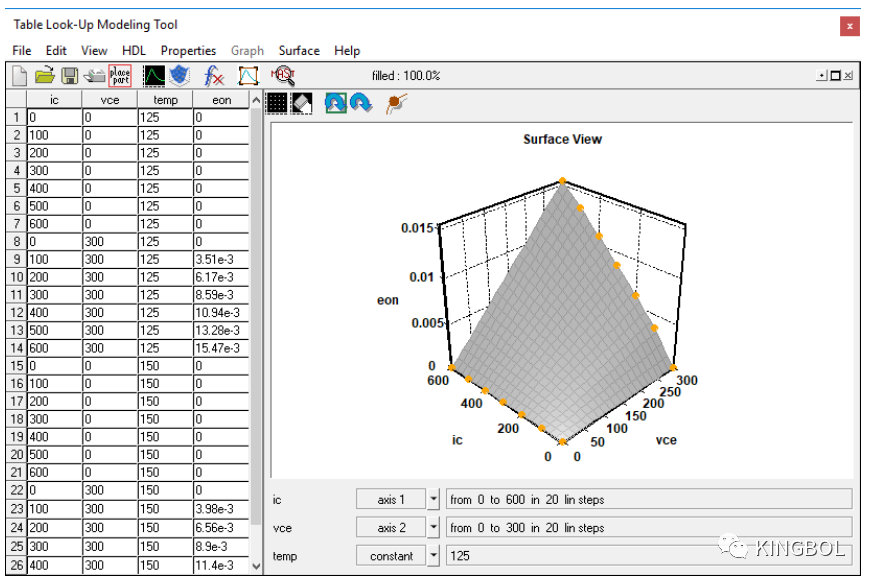
图11 IGBT turn-on energy Eon viewed in the TLU tool
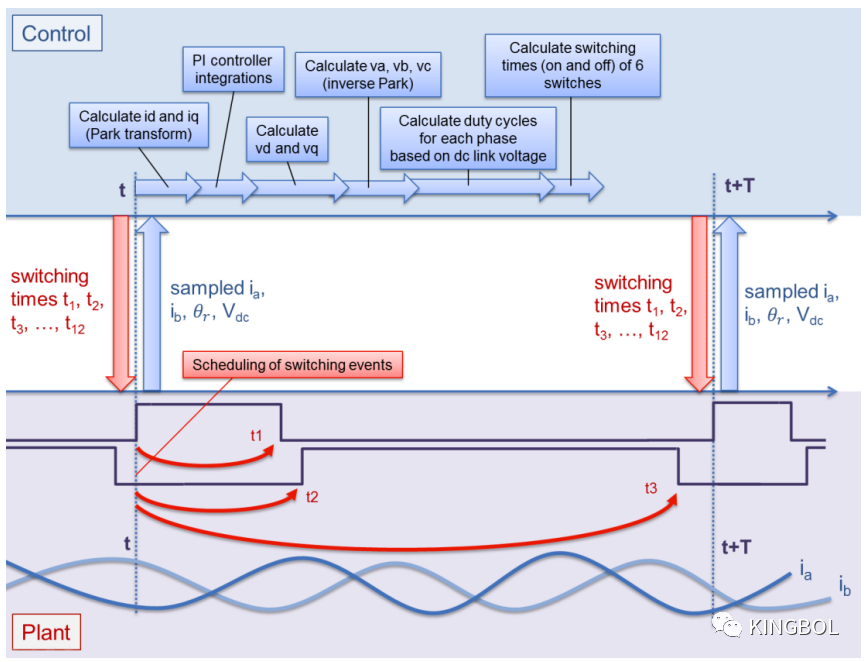
图12 Communication scheme between plant and control in levels 3 and 4
*该控制不是通过异步中断直接触发开关,而是在每个开关周期开始时将12个开关时间传递给发电机(六个开关中的每个开关都有一个开启时间和一个关闭时间)。当控件在外部的FPGA仿真器、Virtualizer或Simulink中运行时,该通信方案中使用的固定且相对较大的时间间隔(200us)显著提高了联合仿真性能。它允许切换事件在所需的时间间隔内触发,没有任何联合仿真性能损耗。
*如果控制不是通过联合仿真在外部运行(就像在安装的powertrain3和powertrain4中的情况一样),可以将控制接收和处理发电机信号的采样频率设置为高于开关频率。较高的采样频率通常允许通过使用滤波器(如卡尔曼滤波器)来降低植物信号中的噪声。开关频率和采样频率是控制模型的参数(f_sampling和f_switching)。
*开关瞬间主要基于占空比,其本身基于电压与直流链路电压综合的比值。此计算还考虑了用户指定的死区时间。死区时间是插入两个互补IGBT的关闭和打开之间的小间隔,以防止同时传导和可能通过逆变器腿的灾难性短路。死区时间一般在1us到5us之间。
*如图13所示,如果不进行补偿,死区时间导致电流波形失真,当相电流过零时(每个同步周期发生6次)尤其明显。扭曲导致增加THD水平和铁损失在电机。在高PWM频率下,死区时间(固定且依赖于IGBT固有开关速度)占开关周期的较大部分,其影响会恶化。在低同步速度下,死区时间的影响也很明显。为了验证这一点,运行Ph_current_study实验。
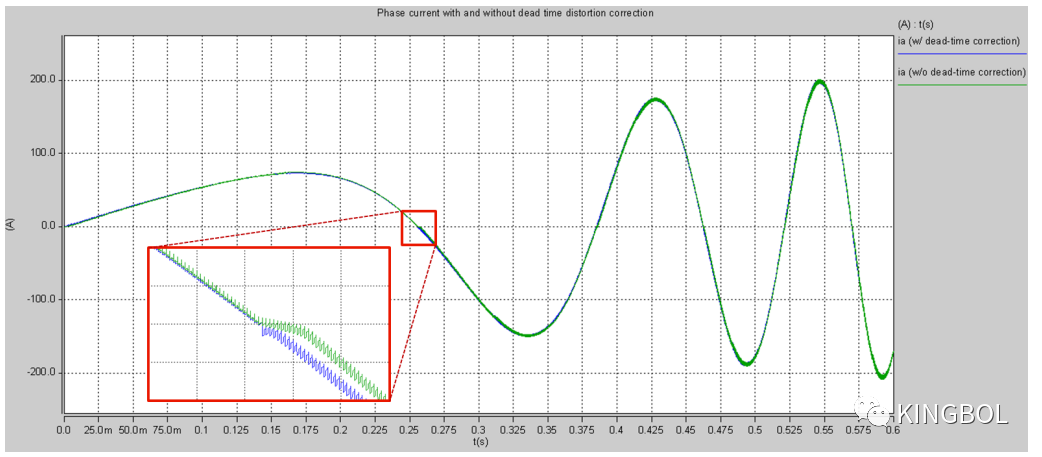
图13 Corrected and uncorrected dead-time distortion
*通过根据电流的极性调整开关瞬时来纠正死区失真。当相同的leg IGBT都关闭时,相关相位的感应电流要么流过上部的自由轮二极管(电流进入leg),要么流过下部的自由轮二极管(电流离开leg)。由于leg电流的极性是提前已知的,因此可以预测有效相位电压是将变为零还是变为直流链路电压,从而导致占空比的有效增加或减少。
*值得注意的是,当同一支路上的两个开关都被主动控制时,控制只关心死区时间,只有当支路电流接近零时才会发生死区时间。高于或低于一定的安全裕度(由FOC参数i_margin定义),对中只有一个开关是主动控制的(如果腿电流离开逆变器,则为上开关,否则为下开关)。非活动开关保持关闭状态,当被控制开关关闭时,其反平行自由轮二极管处理电流。dt_comp参数设置为yes启用死时间补偿。i_margin参数对死区校正的质量没有影响,只需要将该值设置为高于开关纹波电流大小即可正常工作。
04
Powertrain 4:detailed IGBT
*powertrain4提供了逆变器的最高级别的设计,但以模拟速度为代价:这个级别的模拟速度比前一个级别慢10倍左右。逆变器特性是使用基于英飞凌数据表(包含在设计示例安装中)的IGBT工具完成的。通过打开逆变器的层次结构并单击IGBT模型(包括反平行自由轮二极管)的工具属性,可以在工具中重新跟踪该特性的不同方面。
*powertrain4的控件是用C实现的,但在功能上等同于powertrain3的MAST实现。C代码被称为外部例程,可用于查看和编辑(foc_pmsm.c)。编译和链接指令如下:

*其中SABER_HOME需要替换为SaberRD安装的路径。
*transient_analysis实验可以选择和运行,以方便地检查IGBT的启动行为和在详细的逆变器实现下产生的电机电压和电流。参见图28和图29。
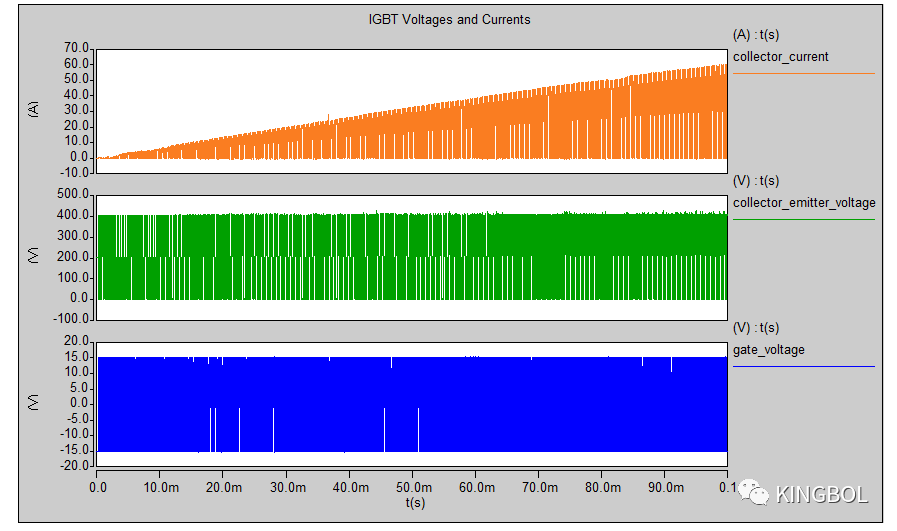
图14 IGBT Voltages and Currents
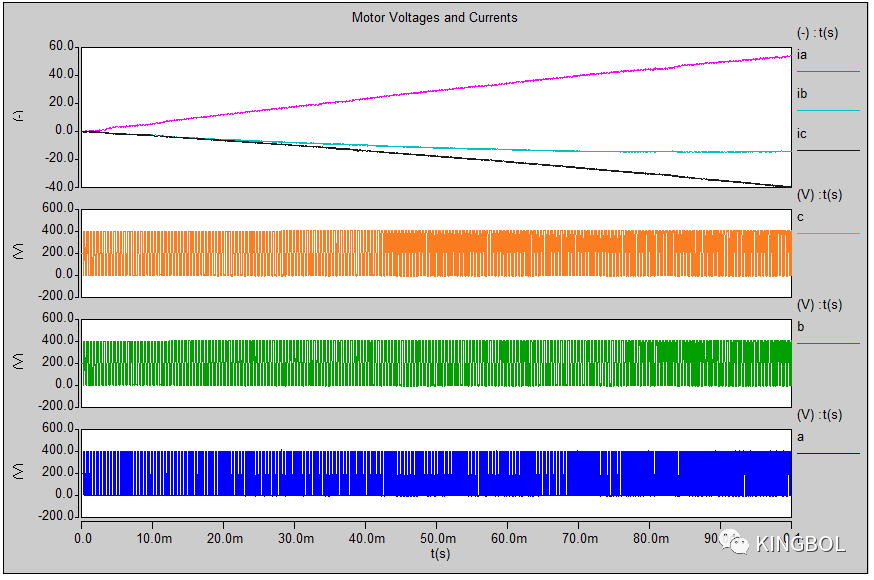
图15 Motor Voltages and Currents
05
总结
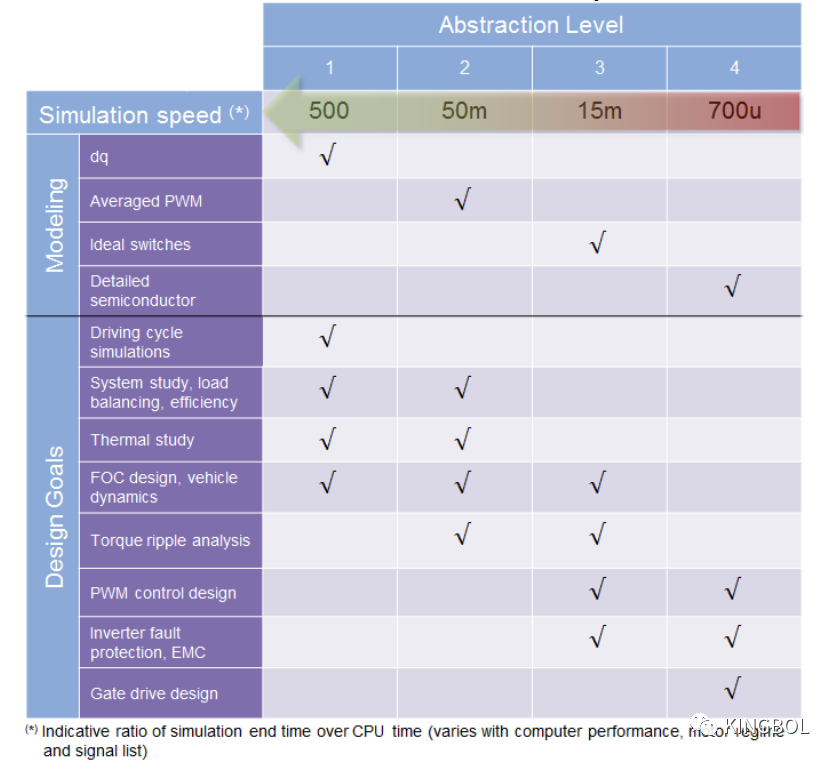
一些建模技术已经证明,提供仿真速度与精度的权衡适当的电机驱动设计的不同阶段。下表总结了这些技术。
*dq模型提供了最高的仿真速度,以有效地模拟驾驶循环,评估整体系统效率,评估负载平衡或电池管理策略,并分析长时间内发展的热方面。
*逆变器的平均PWM模型适用于优化电机控制(FOC或DTC)和分析驱动动态,包括电机缺陷引起的转矩波动和振动。
*理想的开关模型是实用的,以评估PWM替代品(如正弦或空间矢量)和故障保护策略(保险丝,冗余逆变器等)。
*详细的半导体模型对于评估逆变器应力(最大dl/dt和dV/dt,电压和电流峰值),设计栅极驱动器以获得最佳的开关速度和死区时间,以及确定缓冲元件的尺寸是必要的。此级别的建模对于生成支持更高级别抽象的损耗也是必要的。
-
电动汽车动力系统CAN网络设计2018-01-29 1434
-
汽车动力系统技术大盘点2015-04-20 0
-
电动汽车电机2013-03-13 0
-
汽车动力系统解决方案集锦2015-04-20 0
-
汽车动力系统大盘点:助你设计绝佳方案2015-04-21 0
-
电动汽车的高性能运行离不开这项试验2018-11-09 0
-
电动汽车电池动力系统铜绞线软连接2020-08-19 0
-
原理 - 动力系统-电机控制器MCU与驱动电机2021-06-30 0
-
基于容差控制的电动汽车动力系统动态负载模拟2017-01-04 1043
-
电动汽车动力系统工作原理及解决方案2017-01-10 10216
-
ISG型客车混合动力系统的仿真2018-03-12 1139
-
福特纯电动汽车F150渲染图曝光该车动力系统进行了新的设计2020-03-06 807
-
纯电动汽车动力系统选型匹配与仿真2023-03-14 1738
-
SaberRD基于JMAG电机模型的电动汽车动力系统仿真(一)2023-12-06 2292
-
EV4000新能源汽车动力系统综合测试仪2024-07-01 2829
全部0条评论

快来发表一下你的评论吧 !
