

室内环境大规模雷达SLAM具体原理是什么?
RF/无线
描述
0. 笔者个人体会
相对视觉和LiDAR SLAM来说,基于Radar的SLAM较为小众。但视觉SLAM对光照和低纹理区域敏感,在室内使用还有隐私问题。LIDAR SLAM在长走廊、雾烟尘等退化环境效果不好。所以在一些专用领域,Radar SLAM还是有不可替代的价值。
今天笔者将为大家分享伊利诺伊大学和北京大学联合提出的最新工作Radarize,是一种基于小型低成本Radar的SLAM算法。Radarize利用FMCW雷达信号的特性,甚至超越了Radar+IMU的SLAM算法。
1. 这篇文章希望解决什么问题?
现有的Radar SLAM主要有如下几个问题:
(1)、在走廊等低纹理场景,由于缺乏明显的几何特征,导致当前帧可能和距离很远的帧发生误匹配(a);
(2)、IMU在恒速模式下会产生较大噪声,且IMU和Radar的外参标定、时间同步很难操作;
(3)、无线电信号反射会在Radar地图中产生伪影(b);
(4)、3D地图投影到2D时,受到单片毫米波雷达的方位波束影响,地板和天花板反射会产生伪影(c)。

2. 具体原理是什么?
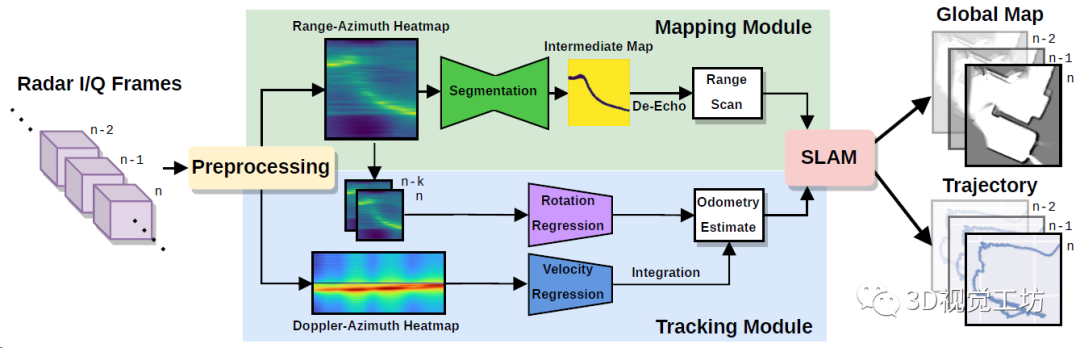
来看一下Radarize的具体pipeline,输入是Radar帧,输出是机器人轨迹和全局地图。Radarize主要利用FMCW雷达信号的特性,由三部分组成。
首先,预处理模块将雷达I / Q帧转换为热力图,跟踪模块分别从多普勒-方位热图和距离-方位热图中识别出平移和旋转,建图模块首先抑制垂直反射(例如地板和天花板),然后使用轻量级分割模型(UNet )对距离-方位热图中的反射体进行分割。分割模型之后是执行多径抑制的去回波过程,最后将建图和跟踪模块的输出输入到SLAM后端,优化后输出实时全局地图和轨迹估计。
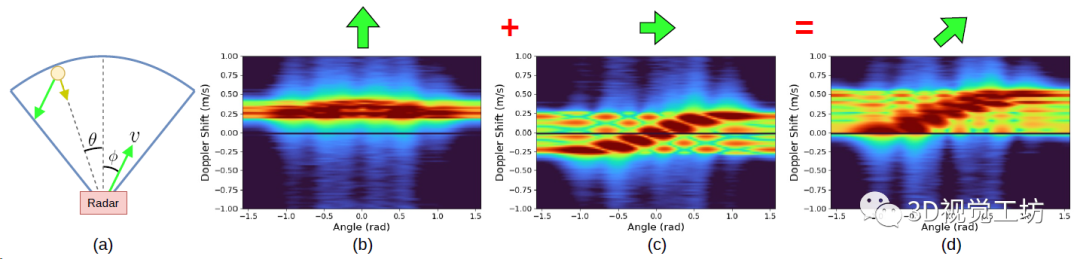
再来看一下如何从合成的多普勒-方位热图估计二维平移运动,其中前视雷达将环境中的反射体投射到水平面(蓝色)上并测量其速度(a)。后面三列分别是向前运动时的多普勒-方位热图(b)、右移时的多普勒-方位热力图(c)、(向前+右)对角线移动时多普勒-方位热力图(d)。
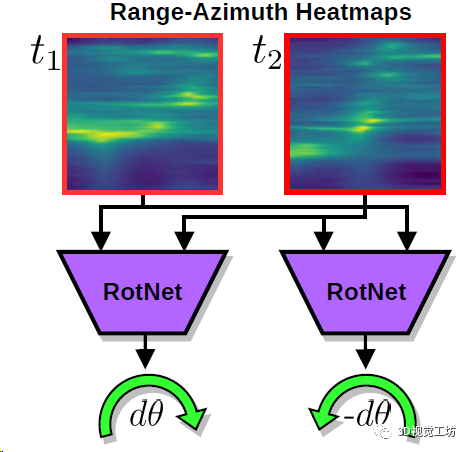
因为在旋转运动过程中,反射体相对于雷达的径向速度为零,所以基于多普勒的估计很难解算旋转运动。因此旋转估计是使用距离-方位图来预测的,雷达从t1到t2有一个向右的旋转,会导致t2的热力图左移。
3. 再来看看和同类方法的对比
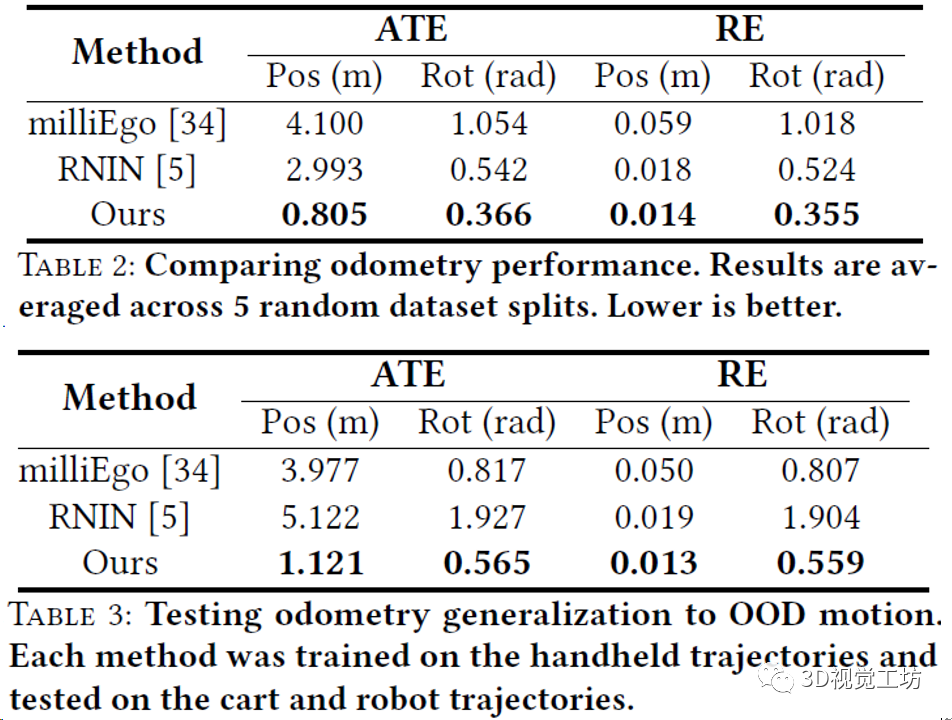
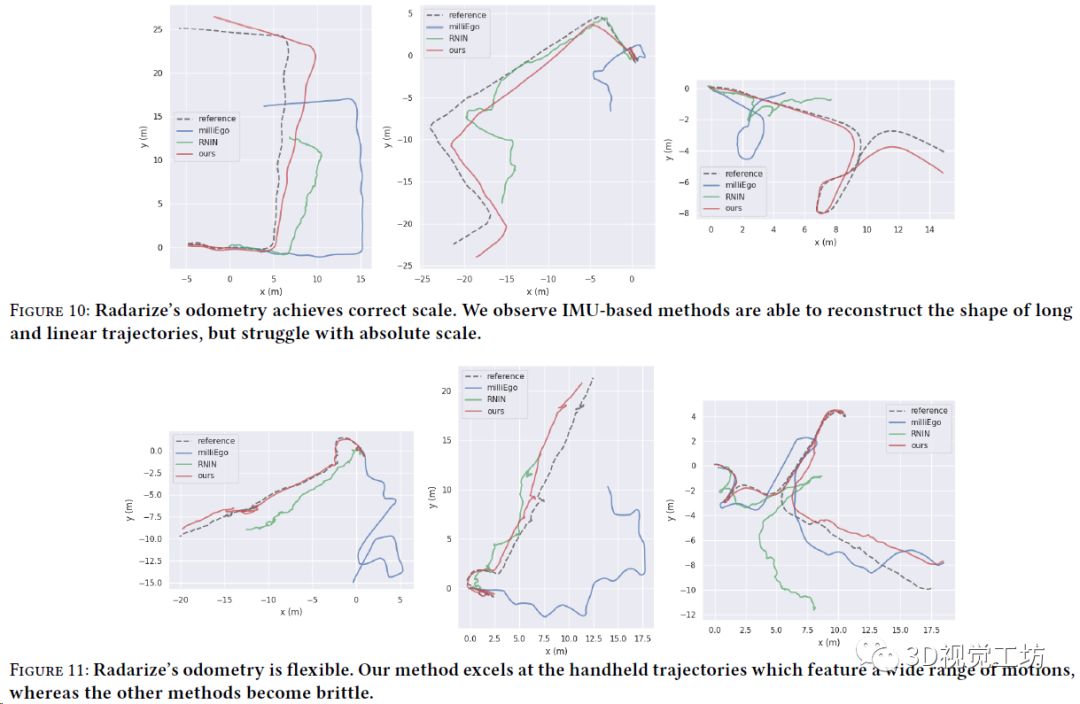
简单介绍一下对比的同类算法:MilliEgo是一种基于稀疏点云的Radar-IMU里程计,利用交叉注意力机制将里程计估计值与辅助的IMU数据进行融合。RNIN是一种将IMU读数回归到里程计估计值的神经-惯性导航模型。
可以发现Radarize在不使用IMU的情况下,精度和泛化性都超越了多传感器方案,OOD是Out-of-Distribution的缩写,表示不同的运动分布。
轨迹精度的定性对比,可以发现Radarize的轨迹距离真值最近。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~
4. 论文信息
标题:Radarize: Large-Scale Radar SLAM for Indoor Environments
作者:Emerson Sie, Xinyu Wu, Heyu Guo, Deepak Vasisht
机构:伊利诺伊大学、北京大学
审核编辑:黄飞
-
【GoKit申请】+室内环境检测系统2015-04-26 0
-
“基于labview的室内环境检测系统设计”的,一起交流啊2015-05-02 0
-
有人的毕业设计是“基于labview的室内环境设计”吗2015-05-02 0
-
【CANNON申请】室内环境监测器2016-01-26 0
-
【IntoRobot Neutron试用申请】基于IntoRobot的室内环境远程监控系统2017-05-08 0
-
怎么实现基于单片机的室内环境参数自控系统设计?2021-11-08 0
-
基于OpenCV的室内环境下多目标跟踪2013-09-23 719
-
基于单片机的室内环境监测系统设计_王君岩2015-12-07 987
-
室内环境温控系统建模研究_吴豪2017-02-07 539
-
多传感器室内环境监测系统_孙占鹏2017-03-19 840
-
关于多功能室内环境监测系统的设计介绍2018-07-10 4910
-
勒夫迈|室内环境检测仪可以检测哪些数据?2020-05-02 1187
-
室内环境监测仿真图2022-03-14 604
-
室内环境监控系统为智慧办公带来哪些优势?2023-04-25 1322
-
温湿度传感器在室内环境监测中的应用2023-06-18 1291
全部0条评论

快来发表一下你的评论吧 !
