

基于LiDAR的行人重识别的研究分析
MEMS/传感技术
描述
作者:戴沐白
行人重识别是指在大规模场景中对未经脚本的行人进行身份识别,每个身份的样本数量往往很少,这通常需要多个采集设备。我们的研究利用低成本的LiDAR解决行人重识别的挑战。我们构建了LReID数据集,这是第一个基于LiDAR的行人重识别数据集,用于促进利用LiDAR点云进行行人重识别的研究。
2、研究内容
基于激光雷达(LiDAR)的行人重识别。我们利用低成本的LiDAR设备解决了人员再识别中的挑战,构建了名为LReID的LiDAR数据集,并提出了一种名为ReID3D的LiDAR-based ReID框架。
3、创新
主要体现在以下几个方面:
首次提出了基于LiDAR的人员再识别(ReID)方法
构建了第一个LiDAR-based ReID数据集(LReID)
提出了LiDAR-based ReID框架(ReID3D)
4、方法
提出了一种基于LiDAR的行人重识别方法,称为ReID3D。该方法利用预训练来引导图形增强编码器(GCEE)提取全面的3D内在特征。
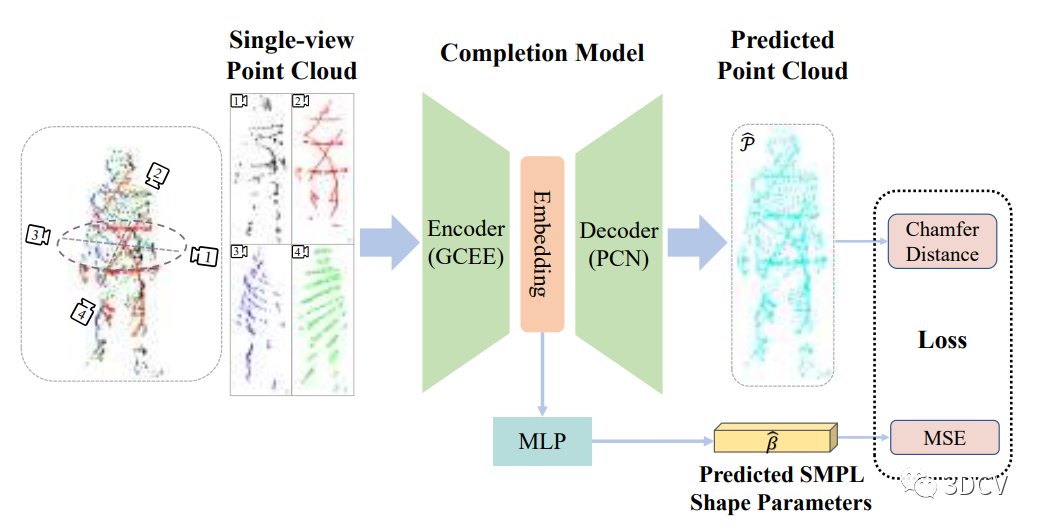 图1
图1
ReID3D采用多任务预训练来引导编码器学习基于LReID-sync的3D人体特征,如上图1所示。ReID3D的ReID网络由基于图的互补增强编码器(GCEE)、互补特征提取器(CFE)和时间模块组成,如下图2所示。预训练的GCEE用于初始化ReID网络。
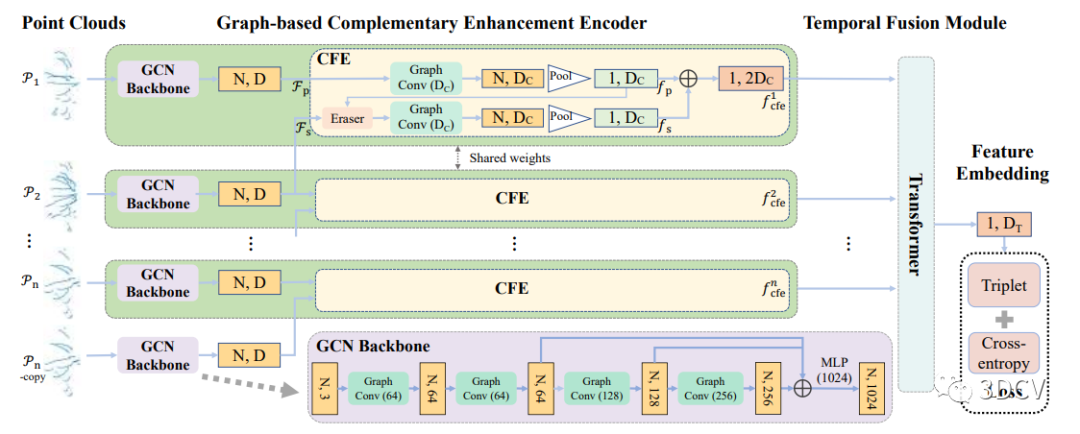 图2
图2
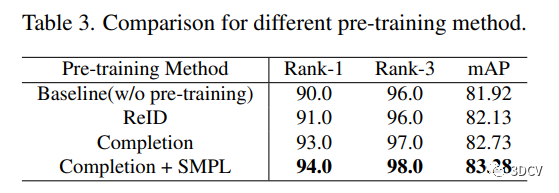
基于我们的观察,可能影响ReID模型性能的关键因素是(1)在跨视图设置下,不同视角导致的信息变化,以及(2)来自单视图的不完整信息。此外,真实数据的收集和注释涉及显著的成本,而模拟数据成本低廉,并且具有丰富和准确的注释。因此,我们利用模拟数据对编码器进行预训练,用于点云完成和SMPL参数学习的任务。我们提出的预训练方法的整体思路如图1所示。
5、数学原理
在这篇文章中,有几个数学公式被用来描述算法和模型的工作原理。
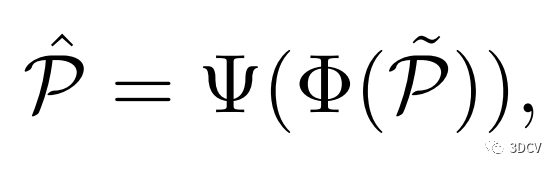
第一个公式是关于点云完成任务的。它表示了通过编码器将输入的点云转换为潜在向量,然后通过解码器基于来预测完整的点云。公式如下:
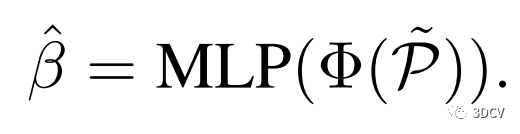
第二个公式是关于学习人体特征的。它表示了通过将潜在向量输入到一个多层感知机(MLP)网络中,将转换为预测的形状参数。公式如下:
第三个公式是关于点云完成任务的损失函数。它使用Chamfer距离(CD)作为预测点云和真实点云之间的差异度量。公式如下:

第四个公式是关于学习形状参数的损失函数。它使用均方误差(MSE)作为预测形状参数和真实形状参数之间的差异度量。公式如下:
这些公式用于描述算法和模型的训练过程和损失函数,以及从点云中提取特征的方法。
6、实验方法与结果
本研究采用了两种实验方法:LReID和LReID-sync

LReID实验方法:
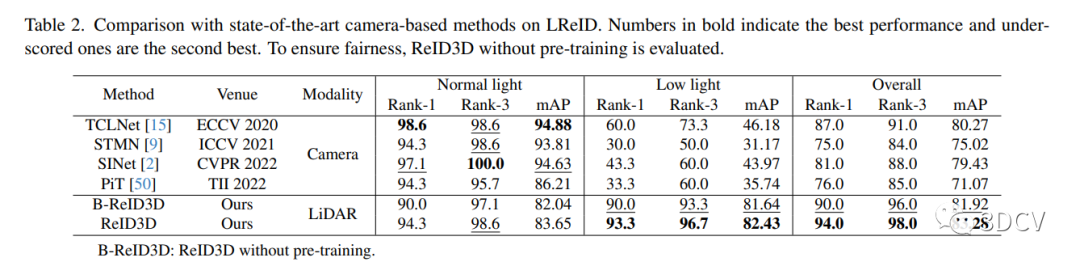
数据集划分:LReID数据集分为训练集和测试集,训练集包含220个身份,测试集包含剩余的100个身份。测试集中有30个身份在低光条件下采集,而70个身份在正常光照条件下采集。
查询和画廊集:在测试集中,选择每个身份的一个样本作为查询集,将其他样本作为画廊集。
评估指标:使用累积匹配特征(CMC)和平均精度(mAP)作为评估指标,与基于摄像头的数据集一致。

LReID-sync实验方法
数据集生成:使用Unity3D软件生成LReID-sync数据集,模拟了多个视角的多个同步LiDAR捕捉到的场景中的行人。数据集包括了点云的完整视图和单个视图之间的补全注释,以及SMPL参数。
数据集特点:LReID-sync包含了600个行人的点云数据,每个行人展示了不同的动作、独特的身体形状和步态,确保了数据集的多样性。
预训练:使用LReID-sync数据集进行预训练,引导编码器学习3D身体特征。
评估指标:与LReID相同,使用CMC和mAP作为评估指标。
7、还有那些改进?
算法改进:可以进一步改进LiDAR-based ReID算法,提高人物识别的准确性和鲁棒性。
数据集扩充:可以进一步扩充LiDAR-based ReID数据集,增加更多的场景、季节和光照条件的样本。
多模态融合:可以将LiDAR数据与其他传感器数据(如RGB图像、红外图像等)进行融合,以提高人物识别的准确性和鲁棒性。
实时性能优化:可以进一步优化LiDAR-based ReID算法的实时性能,以适应实际应用场景中的实时需求。
跨数据集泛化:可以将LiDAR-based ReID算法在其他数据集上进行验证和评估,以验证其在不同数据集和场景下的泛化能力。
8、结论
本研究是第一个关于基于LiDAR的行人重识别的研究,证明了在具有挑战性的真实世界室外场景中利用LiDAR进行人员再识别的可行性。
审核编辑:黄飞
-
人脸识别的研究范围和优势2017-06-29 0
-
ARM海思行人检测/行人识别/人体检测/人体识别解决方案2018-06-14 0
-
实现“三重视野” – LiDAR技术实现安全驾驶2020-08-20 0
-
指纹识别的原理及关键算法的研究2016-07-26 1008
-
动态加权平均行人识别模型2017-11-21 1127
-
核局部Fisher判别分析的行人重识别2017-12-13 880
-
安防:“行人重识别”与“行人检测”的区别分析2018-01-23 6048
-
基于块稀疏表示的行人重识别方法2018-03-29 737
-
如何使用孪生网络和重排序进行行人重识别2018-11-22 1051
-
大华股份的AI行人重识别技术有新突破了2019-07-13 4085
-
中山大学提出新型行人重识别方法和史上最大最新评测基准2021-01-05 2539
-
基于局部区域特征选择的内容一致性行人重识别算法2021-03-21 904
-
可提高跨模态行人重识别算法精度的特征学习框架2021-05-10 717
-
基于视点与姿态估计的视频监控行人再识别2021-05-28 658
-
情感语音识别的研究方法与实践2023-11-16 848
全部0条评论

快来发表一下你的评论吧 !
