

EPSON助力智能泳池清洁机器人导航
描述
目前泳池清洁机器人成为一个新的热点赛道,许多公司都在此新领域投入研发,其中主要为曾经从事家用扫地机的相关公司,因为泳池清洁机器人的智能化与曾经的扫地机器人智能化路径接近,而且目前还处于技术起步阶段
与家用扫地机器人相同的部分是目前泳池清洁机器人主要还是随机式行走,没有加入路径规划部分,清洁效率较低,未来将很快步入规划式时代。不同的部分是泳池内的环境与家用扫地机工作环境完全不同,导航方式无法采用目前主流的激光导航或者视觉导航方式,未来可能主要以惯性导航+超声波为主要的导航方式。目前超声波雷达主要应用为避障等功能,所以主要能应用于泳池清洁机器人导航的最可靠的方式还是惯性导航
首先分析一下泳池机器人的工作环境,泳池机器人的工作主要在泳池底部和墙部的清洁,墙部的清洁由于一般的加速度传感器能够非常清晰的提供俯仰角的数据,而且功能接近过去的擦窗机器人,所以墙部的清洁没有太多的技术难点。而由于泳池机器人是需要上墙的,因此在结构上泳池机器人无法跟家用扫地机一样设置前碰撞开关,所以检测墙体目前一般根据泳池机器人爬上墙壁后造成的俯仰角变化来判断,由此而造成机器人每次碰到墙都会有俯仰角变化。
频繁的俯仰角变化又会对偏航角的精度造成较大的干扰,因此泳池机器人不仅仅需要Z轴陀螺仪的精度高,对X轴和Y轴也有同样的要求。关于工作时间,一般家用泳池在20平到50平左右,虽然面积比较小,但是泳池机器人的移动速度也较低,一般为10CM/SEC,大约是家用扫地机器人的三分之一,清洁30平米的泳池底部大概需要的时间为1个小时,所以惯性导航对陀仪的精度要求也较高,
如果用超声波传感器解决机器人非必要上墙的问题,那么只需要在Z轴使用高精度陀螺仪就能达到这个要求,技术方案推荐为惯性导航扫地机器人过去常使用的1+6方案,即1颗爱普生高精度陀螺仪+1颗6轴陀螺仪传感器。如果机器人需要频繁上墙,那么此方案便不太适合,需要用较高端的IMU来导航。考虑到消费电子的成本要求,爱普生联合第三方合作开发了SGPM01系列陀螺仪模块,在此类工作环境中实测中能达到1小时5度偏差能够满足行业的普遍要求,
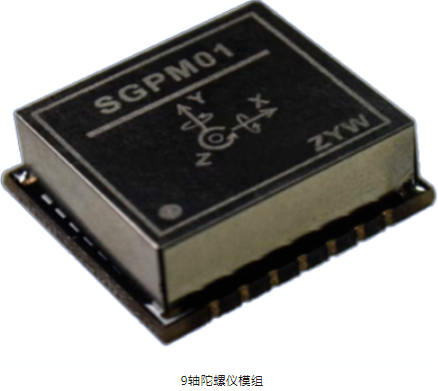
关于SGPM01系列陀螺仪模块
1)产品描述
SGPM01是基于高性能陀螺仪传感器和加速度计、磁力计开发的模组内置3轴陀螺仪和3轴加速度计传感器和3轴地磁传感器。
依赖于高精度的传感器、高性能的处理器和高级的数字信号处理算法,输出非常稳定的角速度值、加速度值、磁力计和姿态角。模块可以支持UART,SPI数据通讯,产品总体尺寸:24*22*8mm
2)产品特性
高精度9轴陀螺仪模组
输出三轴加速度值,三轴角速度值,三轴地磁,态角(Pitch,Roll,Yaw),温度
数字通讯接口UART和SPI
产品尺寸:24*22*8mm
低功耗
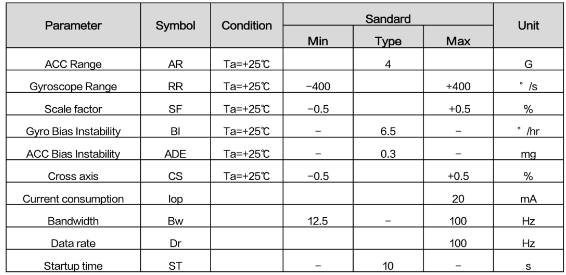
3)规格参数
-
智能清洁机器人2013-11-08 0
-
【深联华杯】基于SLH89F5162单片机的智能清洁机器人2014-01-04 0
-
【mBot申请】智能家居之智能清洁机器人2015-11-02 0
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 0
-
什么是基于SLH89F5162的智能清洁机器人?2019-09-05 0
-
泳池清洁机器人的眼睛--传感器2018-06-06 1273
-
EPSON机器人编程2016-05-09 1766
-
电应普水下测距传感器赋予泳池清洁机器人智能感知2023-07-22 1107
-
爱普生电子助力智能泳池清洁机器人导航方案2023-12-25 901
-
EPSON爱普生助力智能泳池清洁机器人导航方案应用2023-12-26 688
-
智能清洁:泳池机器人的无线充电技术变革2024-03-15 496
-
爱普生陀螺仪模块助力智能泳池清洁机器人导航方案2024-04-01 776
-
水下测距传感器:泳池清洁机器人精准定位的必备智能感知“神器”2024-05-26 368
-
泳池清洁机器人的EMC问题整改案例2024-06-24 1617
-
爱普生SGPM01助力智能泳池清洁机器人导航方案2024-09-04 278
全部0条评论

快来发表一下你的评论吧 !
