
资料下载


×
吸尘机器人硬件设计分析
消耗积分:1 |
格式:rar |
大小:0.6 MB |
2017-10-17
分享资料个
0引言
随着人们生活水平的日益提高,我国人口的老龄化也越来越明显,吸尘机器人作为服务机器人的一种,能够代替人进行清扫房间、车间、墙壁等一些简单劳动。
使服务机器人有了广阔的市场,已成为一些企业和科研院所研究的焦点。目前市场上的吸尘机器人虽然也具有智能性,但大多由于结构不尽合理、通用性差、集成度高而导致成本高,不利于普及。在研究总结市场上相对成熟产品的基础上,基于ARM Cortex-M3处理器设计一款具备自我导航功能的室内吸尘机器人。外形紧凑、结构简单、运行平稳、噪音小,并且成本低,操作方便,还具有可扩展接口,用户能够根据实际需要对其功能做进一步开发。
1吸尘机器人总体构成
利用ARM Cortex-M3处理器设计一款应用于室内的移动清洁机器人,主要任务是能够自主清扫房间,因此应该具备以下功能:
(1)能正确判断机器人所处的房间和在房间中所处的方位;
(2)能正确检测出房间内的墙壁、家具等障碍物;
(3)在游历完所有房间完成清扫任务后能自主回到出发点,关机。
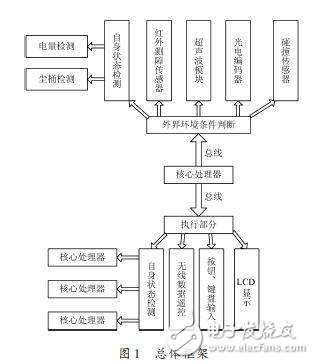
为了防止机器人在工作时出现堵转现象,并且能自由进入一些家具比如沙发、桌子等的底下,吸尘机器人不能太高,外形采用半圆柱形。底盘由四个轮子共同支撑,其中左右两侧为驱动轮,分别由两个微型直流电机直接驱动,前后两个万向轮起到支撑和导向的作用。采用碰撞、红外传感器、超声波等组成多传感器系统。在机器人的上方装有红外接收传感器,底盘边缘均匀分布装有接近传感器,用来检测障碍物;在机器人的前方装有碰撞传感器;前方和左右装有超声波测距传感器,用来检测周围环境。
总体框架设计如图1所示。
2硬件主体设计
硬件系统主要由ARM Cortex-M3处理器、传感器模块、电机驱动模块、人机交互模块、无线遥控发射模块组成。
2.1 ARM Cortex-M3处理
机器人控制系统的主要任务是根据传感器和编码器等反馈回来的数据,进行清扫路径规划,控制清扫、吸尘机构,完成各种控制动作。设计合适的人机接口,在LCD上显示机器人状态和运行时间。因此,机器人控制系统包括传感器模块,电机驱动模块,红外遥控接收模块、LED指示灯和液晶显示模块。采用ARM Cortex-M3处理器作为机器人控制系统的核心,主要是低成本、小管脚数和低功耗,并且具有极高的运算能力和极强的中断响应能力,工作电流仅为50 mA.
2.2电机模块
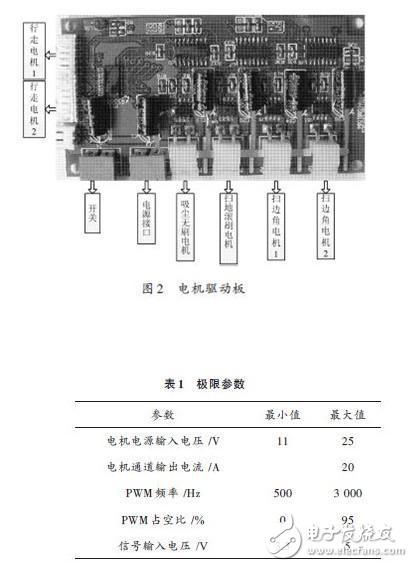
分成小电机驱动威廉希尔官方网站 和两路大功率驱动板,包括用于行走的两个小直流电机和用于吸尘的大功率无刷直流电机、扫地的直流滚刷电机、扫边角的直流边刷电机。因为电机分别决定机器人的行走路径和吸尘功率,所以设计了专门的驱动板,如图2所示。行走模块的设计对吸尘机器人避障规划有着至关重要的作用,我们将吸尘机器人设计成一个闭环控制,主要包括驱动威廉希尔官方网站 和光电编码反馈威廉希尔官方网站 。光电编码反馈威廉希尔官方网站 通过计算反馈回来的脉冲数量和相位而得到当前的电机速度。芯片最高可以驱动25 V的电机,吸尘机器人里行走电机的工作电压为24 V,芯片的电压为5 V,芯片输出的PWM波转化成大电压PWM波控制电机。其极限参数如表1所示。
随着人们生活水平的日益提高,我国人口的老龄化也越来越明显,吸尘机器人作为服务机器人的一种,能够代替人进行清扫房间、车间、墙壁等一些简单劳动。
使服务机器人有了广阔的市场,已成为一些企业和科研院所研究的焦点。目前市场上的吸尘机器人虽然也具有智能性,但大多由于结构不尽合理、通用性差、集成度高而导致成本高,不利于普及。在研究总结市场上相对成熟产品的基础上,基于ARM Cortex-M3处理器设计一款具备自我导航功能的室内吸尘机器人。外形紧凑、结构简单、运行平稳、噪音小,并且成本低,操作方便,还具有可扩展接口,用户能够根据实际需要对其功能做进一步开发。
1吸尘机器人总体构成
利用ARM Cortex-M3处理器设计一款应用于室内的移动清洁机器人,主要任务是能够自主清扫房间,因此应该具备以下功能:
(1)能正确判断机器人所处的房间和在房间中所处的方位;
(2)能正确检测出房间内的墙壁、家具等障碍物;
(3)在游历完所有房间完成清扫任务后能自主回到出发点,关机。
为了防止机器人在工作时出现堵转现象,并且能自由进入一些家具比如沙发、桌子等的底下,吸尘机器人不能太高,外形采用半圆柱形。底盘由四个轮子共同支撑,其中左右两侧为驱动轮,分别由两个微型直流电机直接驱动,前后两个万向轮起到支撑和导向的作用。采用碰撞、红外传感器、超声波等组成多传感器系统。在机器人的上方装有红外接收传感器,底盘边缘均匀分布装有接近传感器,用来检测障碍物;在机器人的前方装有碰撞传感器;前方和左右装有超声波测距传感器,用来检测周围环境。
总体框架设计如图1所示。

2硬件主体设计
硬件系统主要由ARM Cortex-M3处理器、传感器模块、电机驱动模块、人机交互模块、无线遥控发射模块组成。
2.1 ARM Cortex-M3处理
机器人控制系统的主要任务是根据传感器和编码器等反馈回来的数据,进行清扫路径规划,控制清扫、吸尘机构,完成各种控制动作。设计合适的人机接口,在LCD上显示机器人状态和运行时间。因此,机器人控制系统包括传感器模块,电机驱动模块,红外遥控接收模块、LED指示灯和液晶显示模块。采用ARM Cortex-M3处理器作为机器人控制系统的核心,主要是低成本、小管脚数和低功耗,并且具有极高的运算能力和极强的中断响应能力,工作电流仅为50 mA.
2.2电机模块
分成小电机驱动威廉希尔官方网站 和两路大功率驱动板,包括用于行走的两个小直流电机和用于吸尘的大功率无刷直流电机、扫地的直流滚刷电机、扫边角的直流边刷电机。因为电机分别决定机器人的行走路径和吸尘功率,所以设计了专门的驱动板,如图2所示。行走模块的设计对吸尘机器人避障规划有着至关重要的作用,我们将吸尘机器人设计成一个闭环控制,主要包括驱动威廉希尔官方网站 和光电编码反馈威廉希尔官方网站 。光电编码反馈威廉希尔官方网站 通过计算反馈回来的脉冲数量和相位而得到当前的电机速度。芯片最高可以驱动25 V的电机,吸尘机器人里行走电机的工作电压为24 V,芯片的电压为5 V,芯片输出的PWM波转化成大电压PWM波控制电机。其极限参数如表1所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






