
资料下载


×
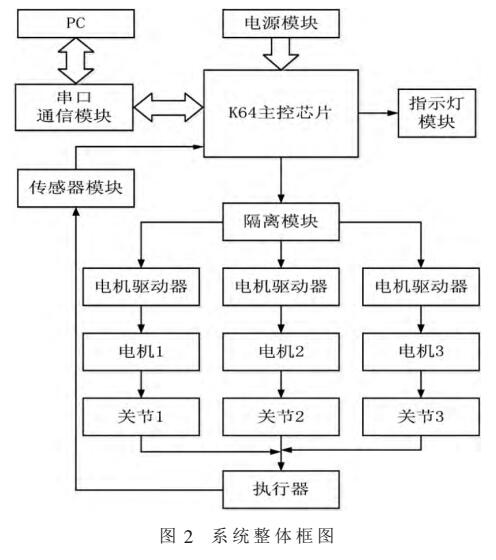
K64机械臂嵌入式控制系统
消耗积分:3 |
格式:rar |
大小:0.41 MB |
2018-01-25
分享资料个
机器人技术是一种融合了机械、计算机技术、电子、人工智能等众多学科于一体的先进技术,各国竞相在机器人的研发及生产上投入大量人力物力。我国的机器人控制技术仍然和欧美一些国家存在较大差距,机械臂也属于机器人范畴的一部分。
为了解放人类生产力,用机器取代人类做一些重复且危险的工作已成为必然。在调研了目前市面上机械臂的发展情况下,结合实际设计了一套基于K64的三自由度机械臂控制系统。该机械臂在平面上具有良好的顺从性,在竖直方面具有良好的刚性,配合机械臂末端携带的工具能够满足不同操作要求。经过研究比对,采用恩智浦的K64芯片作为核心控制芯片、以MQX_Lice为操作系统的控制系统能够充分利用嵌入式软硬件结合的优点,使控制系统的性能更加优越,成本更低,功能更健全,改善了传统机械臂存在的控制功能单一、生产成本高等一些问题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




