

基于EVK1105开发平台设计的交互式机器人小车
工业控制
描述
一. 正文
(1)、项目摘要
交互式机器人小车是可以通过wifi实现数据的采集,视频监控等功能的智能控制平台。它集娱乐、现场勘测等于一体,采用了具有超强的音频解码和流媒体处理能力的AT32UC3A0512作为核心,在EVK1105开发平台上成功嵌入网页。并且实现无需插件或asp、php等语言,仅依靠html语言的交互式控制。交互式机器人小车还可以完成视频的动态监控,无需任何插件即可在网页查看相关媒体。小车的控制也是直接在网页上完成,无需任何软件。如手机上有wifi,经测试也可直接登录控制。而且在小车上增加相关传感器模块,还可直接把数据发到网页上,再结合浏览器插件便可将数据直接导入相关数据库或上传到internet。
(2)、硬件原理
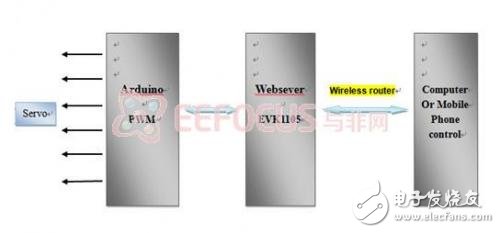
2.1 系统结构图
2.2、小车驱动模块
为了加强小车的野外数据采集能力,我们将小车设计为四驱结构并且全部采用360度舵机控制。这样虽然会降低小车的运行速度,但却让小车获得较大力矩和载重能力,使其在崎岖不平的草地上一样可以行动自如。在整个交互式机器人小车结构设计上我们一共采用了6个舵机:DS04-NFC 和 FUTABA3010。
DS04-NFC是360°舵机,主要用来驱动小车前进。它的控制信号是50HZ方波信号,一个高电平脉冲持续的时间对应一个速度。高电平为1毫秒~1.5毫秒时,舵机正转(1毫秒时正转速度最快,越接近1.5毫秒越慢,1.5毫秒时舵机停转),高电平为1.5毫秒~2毫秒时舵机反转(1.5毫秒时舵机停转,越接近2毫秒反转的速度越快,2毫秒时以最快的速度反转),转弯用差速控制。FUTABA3010则拥有摄像头云台,是180°舵机,根据所给PWM占空比不同可控制摄像头的左右转和上下转。
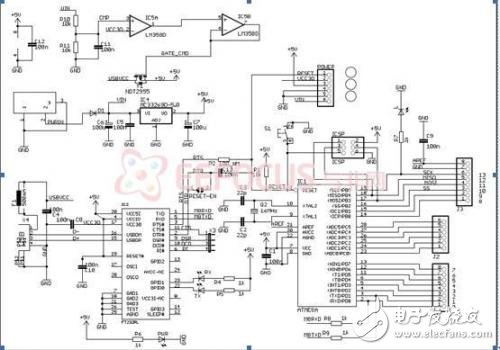
2.3 、Arduino控制板
在本次设计中我们采用了arduino328驱动电机,它主要是以Atmel的Atmega328作为核心,将MCU内部所有资源都编为开源的函数,可直接调用、查看、修改。具体原理图如下:
2.4、 DC-DC升压模块
这一模块主要是用于为无线路由器提供电源,具体威廉希尔官方网站 如下:
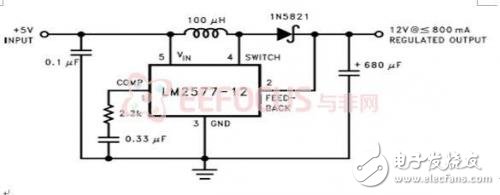
图(4):DC—DC升压威廉希尔官方网站
(3)、软件架构
软件部分我们主要分为三块:无线路由加motion摄像头监控、EVK1105上的Websever、Arduino上的舵机驱动。
3.1 无线路由模块
在无线路由上我们嵌入了openwrt操作系统用于管理网络连接、自动拨号、wifi控制等。UVC摄像头我们也是挂在路由器上的,采用了motion做视频管理。具体编辑如下:
-
基于atmel evk1105开发板实现MP3的设计2018-07-10 3130
-
【NanoPi2申请】智能机器人小车2015-12-02 0
-
我和我的mbot机器人小车2016-05-24 0
-
【VEML4020近距离感应申请】基于手势识别的可交互式智能家居机器人2016-12-09 0
-
使用G传感器和Arduino的手机控制机器人小车2021-08-27 0
-
基于C8051单片机的足球机器人小车系统设计2009-12-04 753
-
基于AT32UC3A EVK1105设计的32位MCU开发技2010-05-07 1855
-
循线机器人小车系统威廉希尔官方网站 模块设计2014-11-17 3437
-
基于SPCE061A单片机的音控智能机器人小车设计2015-11-30 398
-
交互式机器人小车设计方案指南2017-10-16 767
-
基于B/S的web交互式教学平台2017-11-13 954
-
EVK1105和UC/OS-II操作系统自主能量开发解析2017-11-15 685
-
DIY交互式智能机器人设计方案2018-03-20 9091
-
Node.js网页控制的机器人小车2023-02-08 516
-
机器人小车开源设计2023-06-28 233
全部0条评论

快来发表一下你的评论吧 !
