

TI 应用处理器的第三方硬件模块简化机器人设计
描述
当今对于机器人自动化水平的要求越来越高,机器人系统设计人员需要努力满足这样的需求,因此他们面临着日益增长的设计复杂性。这种复杂性增加趋势在与人类紧密协作的机器人领域尤为明显,比如协作机器人 (cobot) 和自主移动机器人 (AMR),如[图 1] 所示。为了确保机器人在与人类接触和靠近人类的情况下可靠运行,这些机器人需要更多的电子元件。因此,这些机器人中的嵌入式处理器变得越来越复杂,必须分析和响应系统中不断增长的数据以支持感知、导航和运动控制等功能。
 图 1 仓库环境中的自主移动机器人
图 1 仓库环境中的自主移动机器人
在使用这些嵌入式处理器时,一些公司不具备开发硬件和软件所需的内部资源和专业知识,无法从一开始就为其系统中的处理器提供全面支持。另一方面,拥有更多内部资源和专业知识的公司需要投入大量时间来开发硬件和软件资源,而这些时间和资源本来可以更好地用于进一步研究和开发新产品。
为了降低设计成本和复杂性,设计人员可以选择与德州仪器 (TI) 及其广泛的第三方合作伙伴生态系统合作,直接利用合作伙伴专门提供的“可直接部署的”硬件元件。TI 还提供有助于进一步简化机器人应用开发的软件和设计资源,包括可用于开发、评测和部署人工智能 (AI) 模型的软件开发套件和基于云的易用工具。
本文将探讨机器人系统设计人员如何借助 TI 广泛而成熟的第三方网络以及 TI 提供的设计资源和易于使用的软件来简化开发流程并加快产品上市步伐。
尽管许多机器人系统都将受益于“可直接部署的”硬件资源,尤其是用于电机控制、通信和功能安全的硬件资源,但本文将重点说明适用于视觉处理应用的资源,并着重介绍 TI 的几个硬件合作伙伴。请访问 TI [合作伙伴目录],了解有关 TI 合作伙伴生态系统的更多信息。
借助 TI 应用处理器的第三方硬件模块简化机器人设计
随着现代制造业和全球供应链需要提高生产率和控制力,协作机器人和 AMR 越来越受欢迎。特别是在制造环境中,这些机器人可以加强与人类和其他机器人的协作,以提高运行效率,同时还能让人类专注于优先级更高的任务。
虽然这些机器人的优势可能简单明了,但其设计可能很复杂,尤其是实施在网络边缘使用分析功能和深度学习技术的视觉处理系统时。开发摄像头模块并随后在协作机器人和 AMR 中测试和部署 AI 模型需要花费大量时间,而且需要特定的编程专业知识和专业软件。
为了在空间受限的基于 Arm® 的设计中加快视觉处理的开发,设计人员可以使用 TI 的第三方硬件合作伙伴提供的模块,例如 TechNexion ROVY-4VM 模块上系统 (SoM)、Congatec 智能移动架构 (SMARC) 模块 conga-STDA4、BeagleBone AI-64® 和 Arducam V3Link™ 摄像头套件。TechNexion、Congatec 和 BeagleBone 模块基于 [TDA4VM 处理器],该处理器采用异构架构,具有双 Arm Cortex®-A72、DSP 和加速器,适合用于在基于视觉的应用中进行深度学习。
TechNexion ROVY-4VM
通过使用 TechNexion ROVY-4VM 等 SoM,设计人员可以围绕一个能够简化设计流程的模块来开发其 AMR 产品。ROVY-4VM 在经过全面测试并可立即投入生产的单个 PCB 上集成了处理器、电源管理 IC (PMIC) 和存储器(DDR、UFS、SPI NOR 闪存),处理器的所有其余外设采用方便的板对板高密度互连 (HDI) 布线。虽然设计人员可以从头开始设计具有所需功能的载板,但更方便的做法是利用 TechNexion 开发的 [ROVY-4VM-EVK],这是用于 ROVY-4VM 的完整 AMR 专用套件(如[图 2] 的 AMR 演示所示)。该套件可用作快速实现所需功能的参考设计,例如使用 FPD-Link™ III 技术添加多达 8 个即插即用摄像头 ([TECHN-3P-VLS3-X-SL]),添加显示屏(也使用 FPDLink III),使用标准或单线对以太网来扩展以太网端口,以及使用易于实现的标准 USB3/Gb 以太网端口进行快速原型设计和开发。
 图 2 具有底盘的 TechNexion“Rovybot”AMR 演示 (ROVY-4VM-EVK)
图 2 具有底盘的 TechNexion“Rovybot”AMR 演示 (ROVY-4VM-EVK)
Congatec conga-STDA4
借助 [conga-STDA4],设计人员可以利用 SGeT 的开放式标准 SMARC 模块外形和引脚排列来增强功能安全等特性,并利用基于 ARM 的处理器和基于 Linux 的软件来添加本机分析功能。如今,工厂自动化中使用的许多工业应用都基于 SMARC 模块。作为得到众多开发人员支持的开放式标准,SMARC 外形便于设计,并且可在不同设计之间进行扩展,因为现有载板的某些方面可以重复使用,例如载板布线以及用于 DIN 轨安装式 IPC 的外设集,通常只需要简单交换模块即可。因此,易用性将得到增强,有助于设计人员更轻松地更新现有设计,降低系统总成本和尺寸,同时还可利用 TDA4VM 处理器的高级功能集。
BeagleBone AI-64 和 ArduCam
[BeagleBoard.org 基金会]的 [BeagleBone AI-64]是机器人系统视觉处理早期开发的另一种选择。[BEAGL-BONE-AI-64] 是一个基于 TDA4VM 的完整系统,可以使用 Debian 操作系统,并能够与来自 [ArduCam]的 [ARDCM-3P-V3LINK-CAM V^3^Link 摄像头套件]相结合(如[图 3]所示),从而简化视觉处理设计,并帮助设计人员学习如何控制机器人。对于 Raspberry Pi 生态系统的用户来说,[Beagle AI®](基于 [AM67A 处理器])可能会更熟悉,也可以和 ArduCam 套件兼容,以便快速开发和测试适用于其特定应用的多摄像头视觉处理。
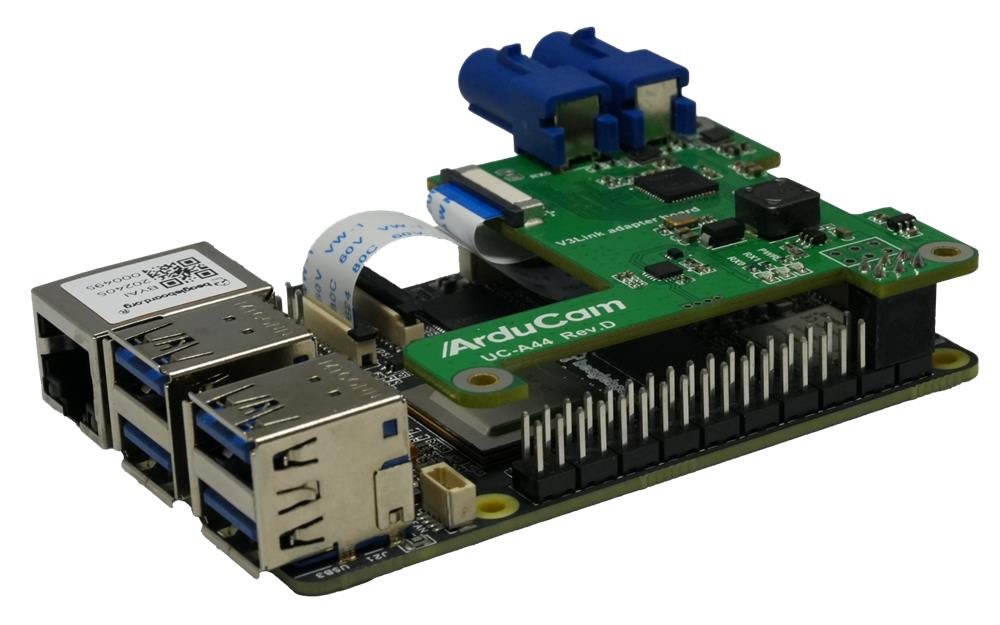 图 3 ArduCam V ^3^Link 摄像机套件
图 3 ArduCam V ^3^Link 摄像机套件
利用直观的软件和开发资源简化机器人视觉处理
除了“可直接部署的”硬件外,机器人系统设计人员还需要使用对用户友好的直观软件来简化开发过程。此软件可实现更高效的任务控制、协调和执行。软件越直观,工程师就越容易进行机器人系统的设计、编程和故障排除。
对用户友好的软件可减少学习时间,使工程师能够更专注于应用的功能,而不是纠结于复杂的软件界面或接受额外培训。当使用 TI 处理器进行视觉处理设计时,机器人系统设计人员可以使用一整套软件、基于网络的工具和开发资源,包括:
- [适用于 TDA4VM 的软件开发套件 (SDK)]适用于 TDA4VM 的 SDK 是一个统一的软件平台,可在不同的片上系统 (SoC) 器件之间进行扩展,从而简化实施和代码重用。该 SDK 提供了灵活的软件平台,可帮助简化和加快具有 AI 驱动视觉处理功能和实时处理功能的机器人应用的开发。该 SDK 附带广泛的文档和一整套软件,包括驱动程序、中间件和应用程序示例,可大幅加快机器人应用的开发。
- [适用于 TDA4VM 和 AM6xA 应用处理器的 TI Robotics 软件开发套件 (SDK)]TI Robotics SDK 旨在支持基于 TDA4VM 和 AM6xA 应用处理器进行机器人应用开发。该 SDK 具有软件组件、库和工具,旨在加快机器人应用(包括实时控制、3D 图形、图像和视频处理)的开发。此外,还包括一些示例和文档,可帮助开发人员快速开始开发。
- [Edge AI Studio]Edge AI Studio 是一系列基于网络的工具的集合,旨在简化和加快边缘 AI 应用的开发。该工具集提供了一个对用户友好的界面,方便基于 TI 处理器进行机器学习模型的开发、培训和部署。如果设计人员和开发人员正在开发需要在网络边缘进行实时处理的 AI 应用,Edge AI Studio 中的 Model Composer、Model Analyzer 和 Model Maker 工具非常有用。
Edge AI Studio 为使用远程 TI 硬件开发 AI 应用提供了简化的图形界面,对于在机器学习模型开发方面没有丰富经验的设计人员而言非常有用。此外,还提供预先训练的模型,并允许对这些模型进行定制。
结语
在嵌入式处理器和支持这些处理器的第三方硬件方面的创新将继续推动机器人技术的发展。虽然我们已经在各行各业中见识了其中一些功能,但利用先进的视觉处理组件来实时处理和分析大量视觉数据的能力将有助于机器人更可靠、更安全地对瞬间决策做出反应,并适应动态情况。从工厂和仓库中与人类密切合作的协作机器人,到可以在城市街道上安全行驶并运送货物的自动驾驶汽车和无人机,机器人将持续革新我们世界的运作方式。
审核编辑 黄宇
-
如何把第三方库加到PROTEUS中?2013-06-15 0
-
第三方dll调用问题!!!2018-05-11 0
-
LabVIEW与第三方软件交互问题2018-12-26 0
-
国内知名第三方检测认证机构排名2019-07-19 0
-
第三方设备不支持TDO / TDI线路的菊花链2019-09-20 0
-
关于LabVIEW调用第三方exe,如何去控制第三方exe按钮的问题2020-08-12 0
-
头文件中包含第三方文件2021-08-18 0
-
如何在蜂鸟处理器核的基础上扩展第三方指令?2023-08-16 0
-
TI的基于DSP兼容的第三方算法协议的详细资料概述2018-05-07 918
-
第三方实例:iView开发介绍 (1)2018-08-22 4369
-
Nginx在不加载第三方模块的情况下到底能做说明2019-04-20 3175
-
大疆正式发布RoboMaster EP教育机器人 支持一机多形态并兼容树莓派等第三方硬件2020-03-09 3762
-
第三方脚本成为网络攻击“重灾区”,多管齐下防范第三方脚本安全隐患2020-09-04 3583
-
如何安装第三方模块爬取4K壁纸2021-12-27 1776
-
提供基于MikroSDK 2.0的GSDK扩展支持以简化第三方硬件集成设计2023-05-09 836
全部0条评论

快来发表一下你的评论吧 !
