

MS41929——双通道超低噪声 256 细分微步进低压电机驱动
电子说
描述
产品简述
MS41929 是一款双通道 5V 低压步进电机驱动芯片,通过
具有电流细分的电压驱动方式以及扭矩纹波修正技术,实现了
超低噪声微步进驱动。
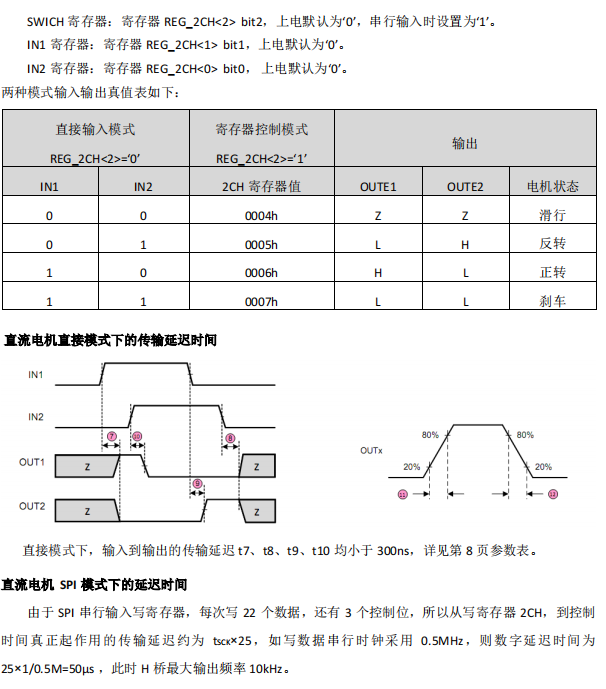
芯片另外内置一个直流电机驱动器,上下开关的电阻之和
低至 1.1Ω。
MS41929 内置了晶振放大模块,可以使用无源晶振。
主要特点
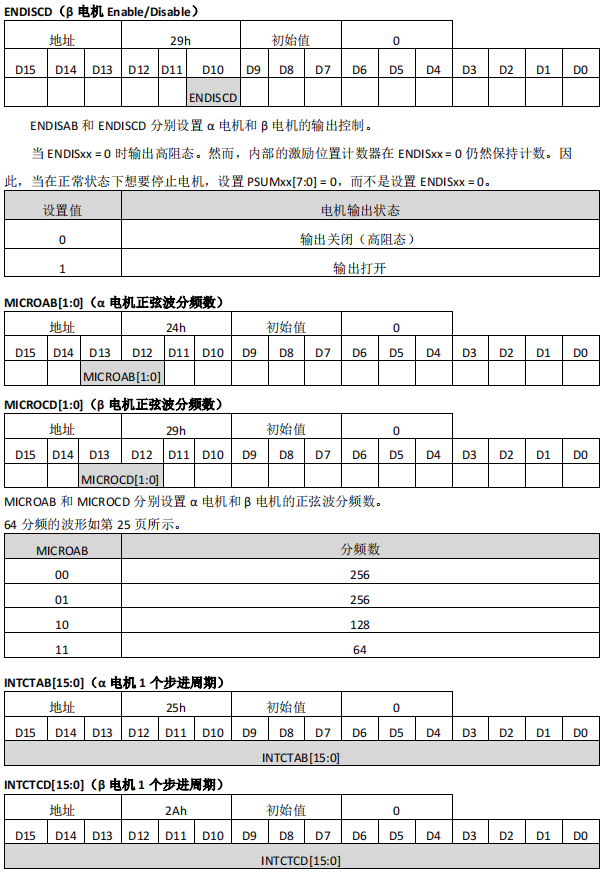
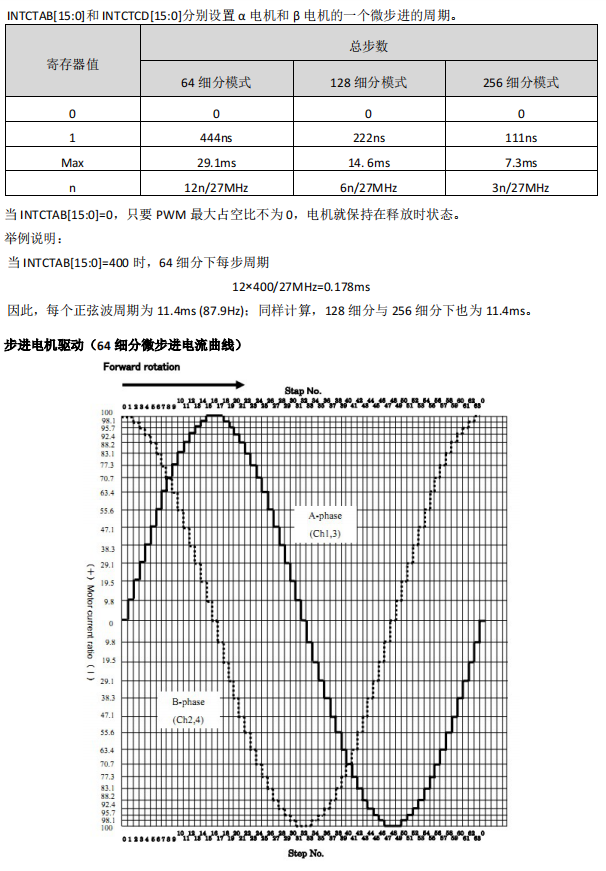
◼电压驱动方式,256 细分微步进驱动威廉希尔官方网站 (两通道)
◼每个 H 桥最大驱动电流±0.5A
◼四线串行总线通信控制马达
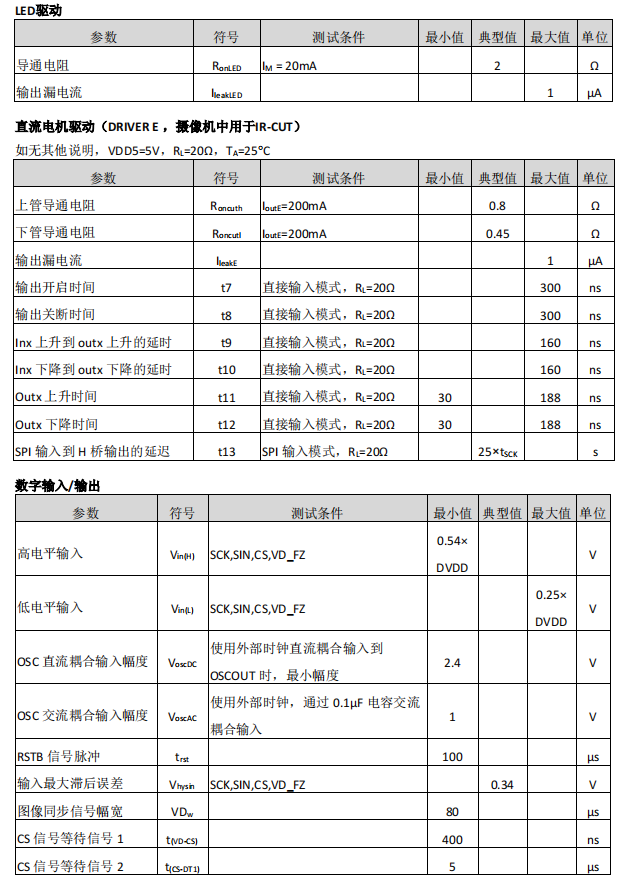
◼内置双路 LED 驱动(开漏输出)
◼内置直流电机驱动,最大驱动电流±0.5A
◼无源晶振
◼QFN32 封装(带散热片)
应用
◼机器人、精密工业设备
◼摄像机
◼监控摄像机
产品规格分类

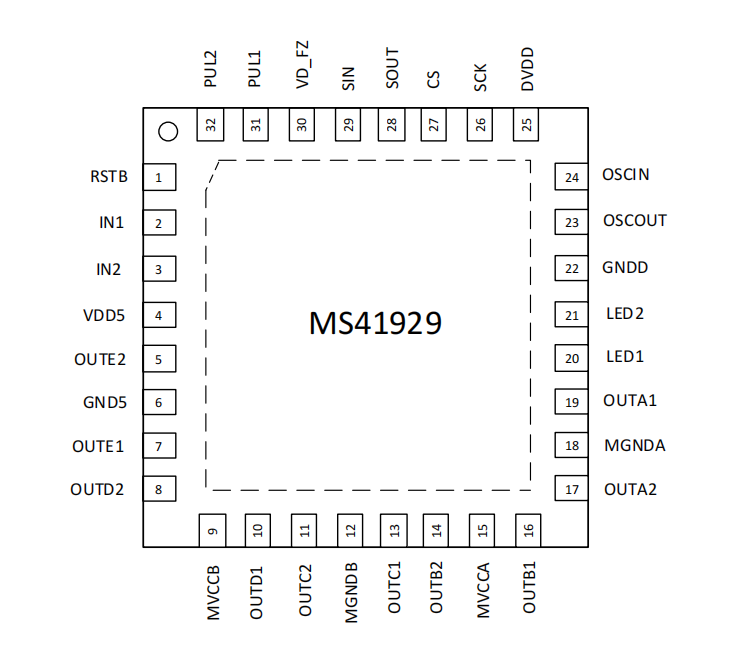
管脚图
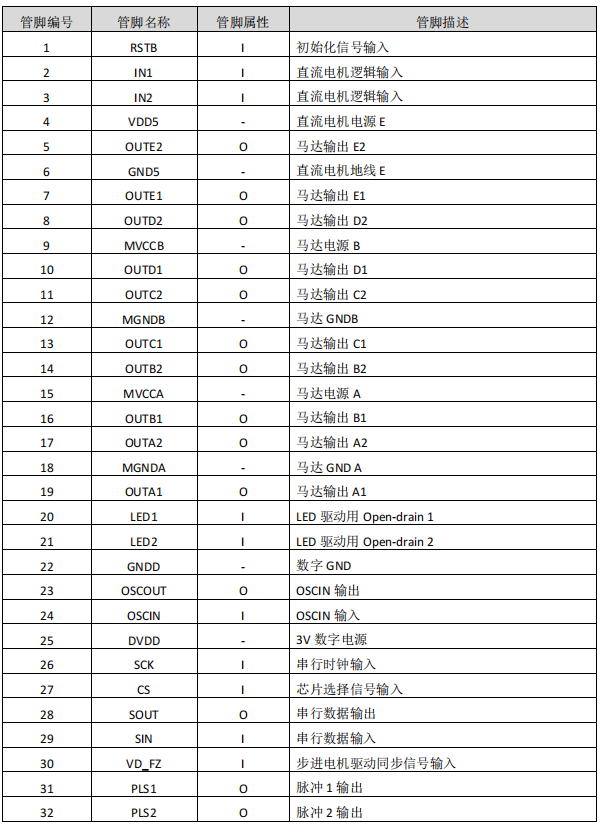
管脚说明
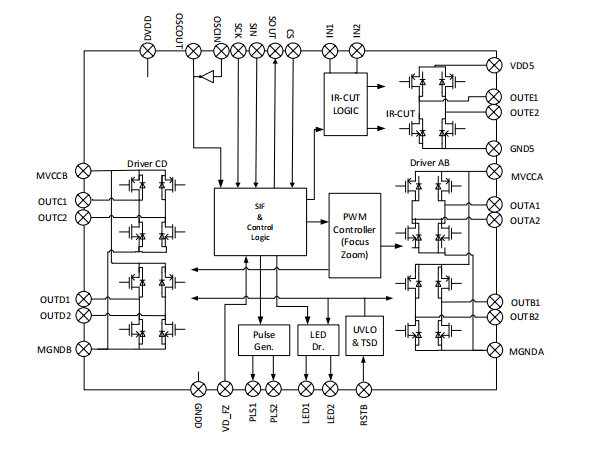
内部框图
极限参数
绝对最大额定值
芯片使用中,任何超过极限参数的应用方式会对器件造成永久的损坏,芯片长时间处于极限工作
状态可能会影响器件的可靠性。极限参数只是由一系列极端测试得出,并不代表芯片可以正常工作在
此极限条件下。
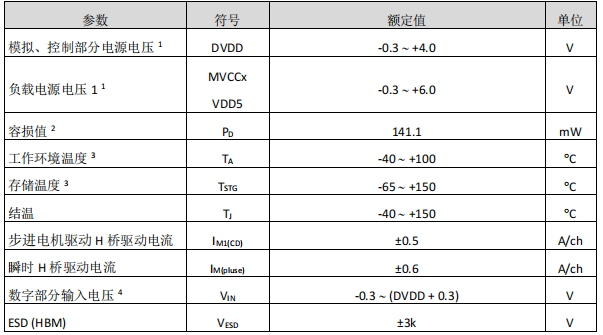
注:1. 绝对最大额定值,是指在容损范围内使用的场合。
2. 容损值,是指在 TA= 85°C 时封装单体的值。实际使用时,希望在参考技术资料和 PD- TA特性图的基础上,
依据电源电压、负荷、环境温度条件,进行不超过容损值的散热设计。
3. 容损值、工作环境温度以及存储温度的项目以外,所有温度为 TA= 25°。
4. 输入电压(DVDD + 0.3)不可超过 4.0V。
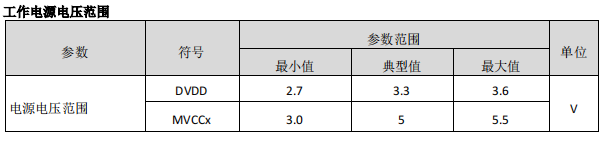
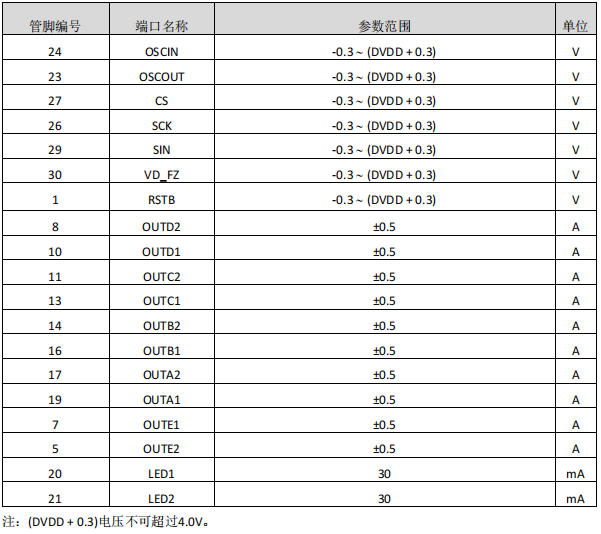
端子容许电流电压范围
注:1. 容许端子电流电压范围,是指不被破坏的限界范围,不保证实际工作状态。
2. 额定电压值,是指对 GND 的各端子的电压。GND 是指 GNDD,MGNDA,MGNDB,GND5 的电压。另外,
GND = GNDD = MGNDA = MGNDB=GND5。
3. 3V 电源,是指 DVDD 的电压。
4. 在下面没有记述的端子以外,严禁从外界输入电压和电流。
5. 关于电流,“+”表示流向 IC 的电流,“-”表示从 IC 流出的电流。
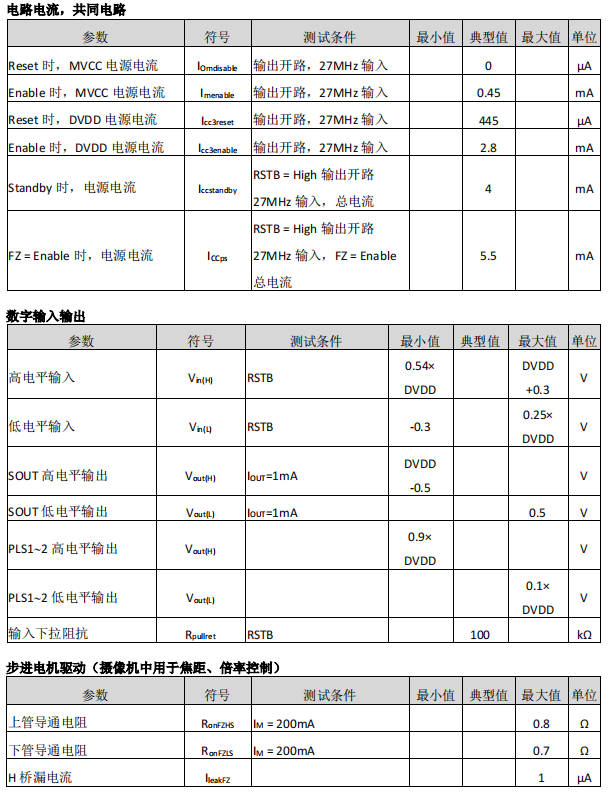
电气参数
MVCCx =VDD5= 5V, DVDD =3.3V。没有特别规定,环境温度为TA= 25°C ±2°C。
如有需求请联系——三亚微科技 王子文(16620966594)
功能描述
1. 串行接口
电气参数(设计参考值)
VDD5=MVCCx =5V, DVDD = 3.3V。
注意:没有特别规定,环境温度为 TA= 25°C ±2°C。本特性为设计参考值,仅供参考。
1.1 串行口输入
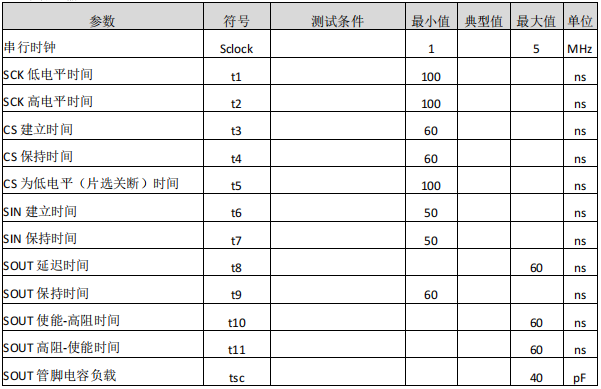
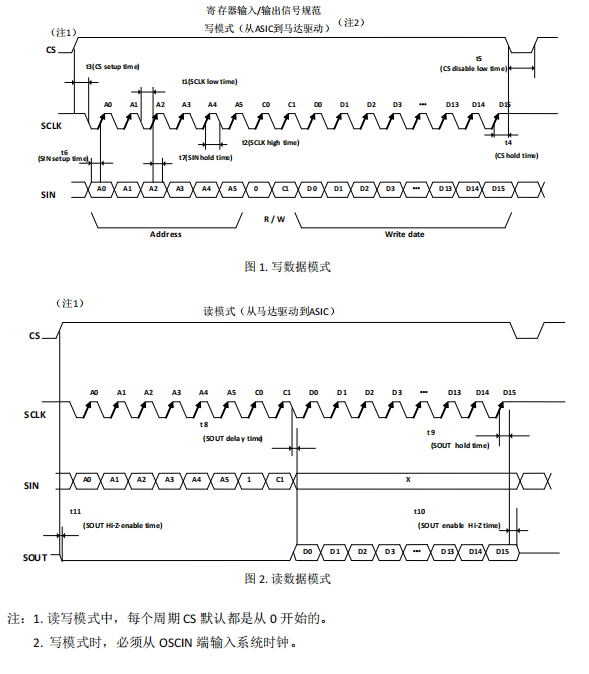
1. 数据转换在 CS 的上升沿开始,在 CS 的下降沿停止。
2. 一次转换的数据流单位是 24 位。
3. 从 SIN 引脚输入地址和数据时,在 CS = 1 的条件下,时钟信号 SCK 保持一致。
4. 在 SCK 信号的上升沿,数据被打入 IC。同时,数据输出时,在 SOUT 引脚读出(数据在 SCK 的上升
沿输出)。
5. 当 CS=0 时,SOUT 输出高阻态。并且当 CS=1 时,输出“0”除非有数据读出。
6. 当 CS=0 时,复位整个串行接口控制。
1.2 数据格式
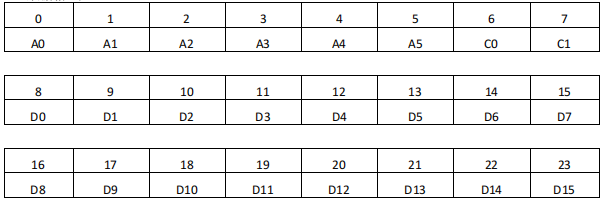
C0:寄存器读写选择: 0:写模式;1:读模式
C1:不使用
A5A0:寄存器地址
D15D0:写入寄存器的数据
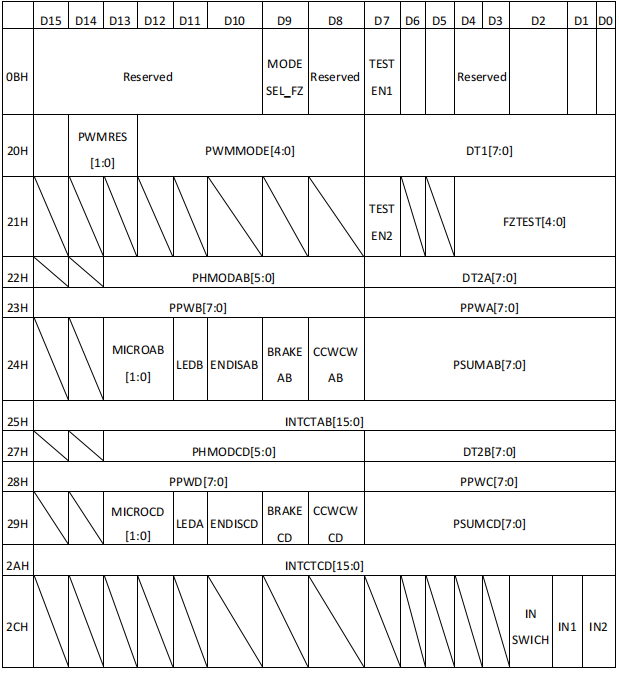
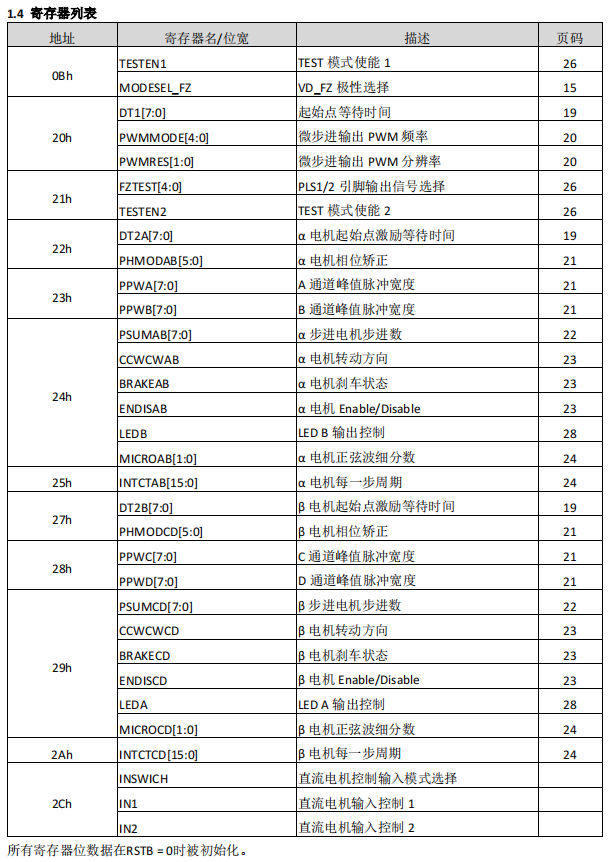
1.3 寄存器分布图
1.5 寄存器建立时刻
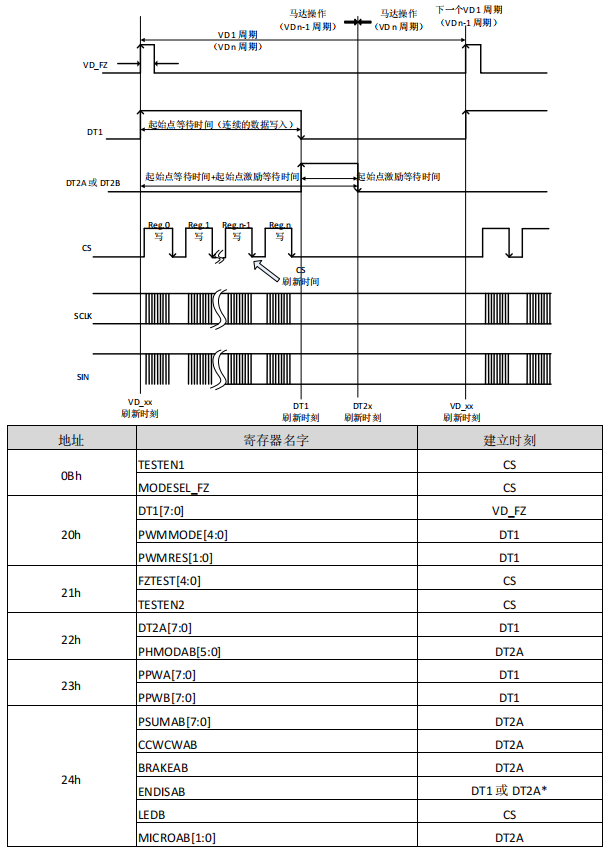
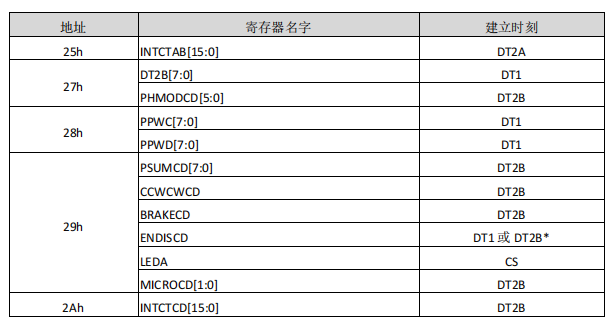
* 0→1:起作用于DT1;1→0:起作用于DT2x。
原则上来说,用于细分步进的寄存器的建立,应该在起始点延时的这段时间段内执行完(参考第
14页图)。在起始点延时这段时间外,写入的数据也能被存入寄存器。然而,如果写操作在刷新时间
后继续执行的话,好比在起始点激励延时的最后,建立刷新时刻不会在计划的时刻有效。举例说明:
如果在起始点激励延时后更新的数据14如下图一样被写入,数据1和2在a时刻立即被更新,数据3和4
在b时刻被更新。即使数据是连续写入的,更新的时间间隔了1个VD的周期。
由于上述原因,为了数据及时更新,寄存器数据的建立需要在起始点延时的这段时间段执行完。
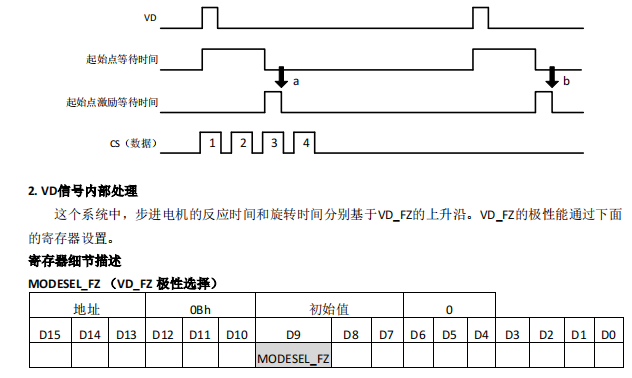
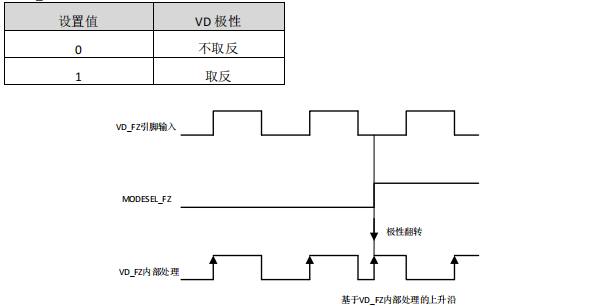
MODESEL_FZ设置输入IC内部的VD_FZ的极性。
当设置为“0”,极性基于VD_FZ的上升沿。当设置为“1”,极性基于VD_FZ的下降沿。
MODESEL_FZ 选择输入 VD_FZ 的极性。因此,基于 MODESEL_FZ 的选择时刻,产生如下图所示的边沿
和 VD_FZ 的边沿无关。
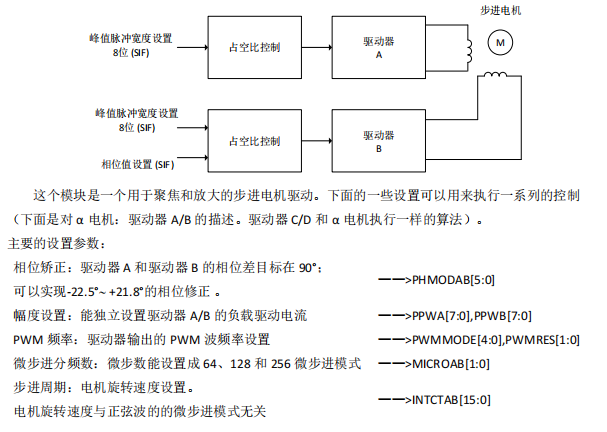
3. 步进电机细分步进驱动
3.1 模块框图
3.2 相关设置的建立时刻
建立时刻和相关时间如下所示。
地址 27h 到 2Ah 的设置同 22h 到 25h 的设置相同,所以 27h 到 2Ah 的描述就省略了。如果相关寄
存器被刷新,则每一个 VD 周期来到时,会实现一次设置的加载刷新。当同样的设置被执行时超过 2
个 VD 脉冲时,没有必要在每个 VD 脉冲都写入寄存器数据。
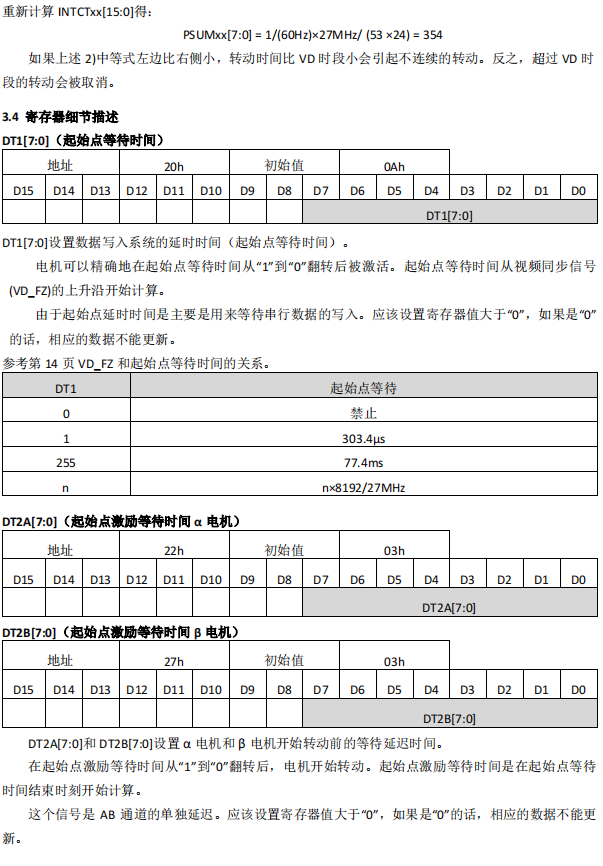
DT1[7:0](起始点延时,地址 20h)
更新数据时间设置。在系统硬件复位后(引脚 RSTB:低→高),开始激励和驱动电机前(DT1 结
束)这段时间内,必须设置此项.
由于这个设置在每次 VD 脉冲来到时更新,没有必要一定在起始点延迟时内写入。
PWMMODE[4:0], PWMRES[1:0](微步进输出 PWM 波频率,地址 20h)
设置微步进输出 PWM 波频率。需要在开始激励和驱动电机前设置执行(DT1 结束)。
DT2A[7:0](起始点激励延时,地址 22h)
更新数据时间设置。复位后(引脚 RSTB:低→高),需要在开始激励和驱动电机前被设置执行
(DT1 结束)。
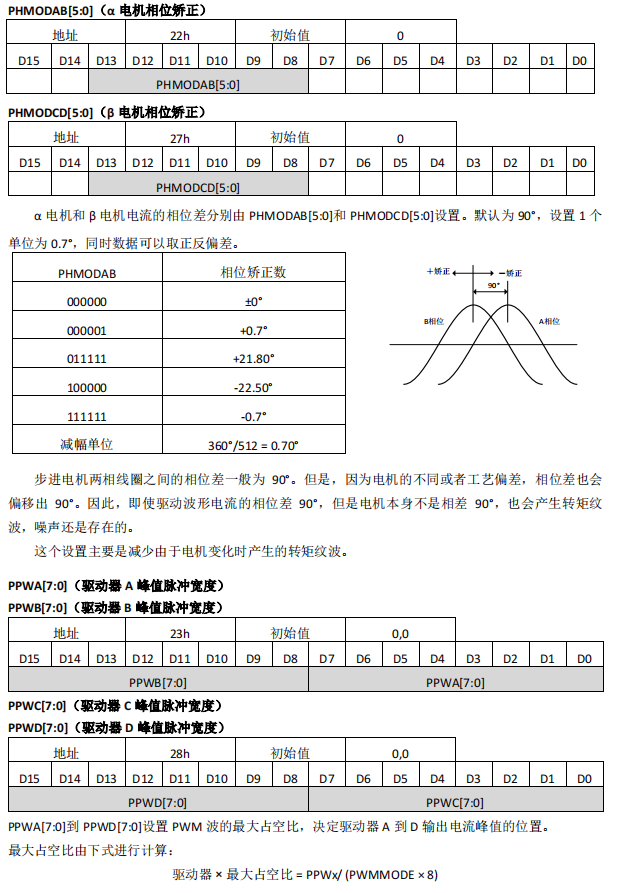
PHMODAB[5:0](相位矫正,地址 22h)
通过矫正线圈 A 和 B 的相位差,驱动器产生的噪声会减少。合适的相位矫正必须依据于电机的旋
转方向和速度,此设置需要随着旋转方向(CCWCWAB)或者旋转速度(INTCTAB)的变化而改变。
PPWA[7:0],PPWB[7:0](峰值脉冲宽度,地址 23h)
设置 PWM 最大占空比。设置需要在开始激励和驱动电机前被设置执行(DT1 结束)。
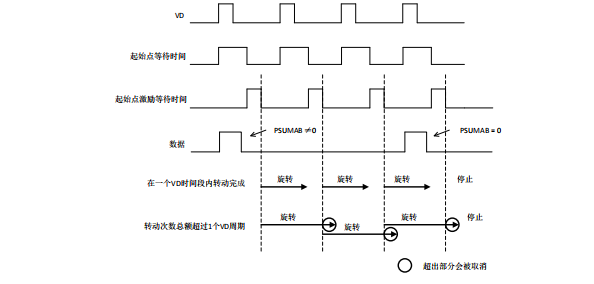
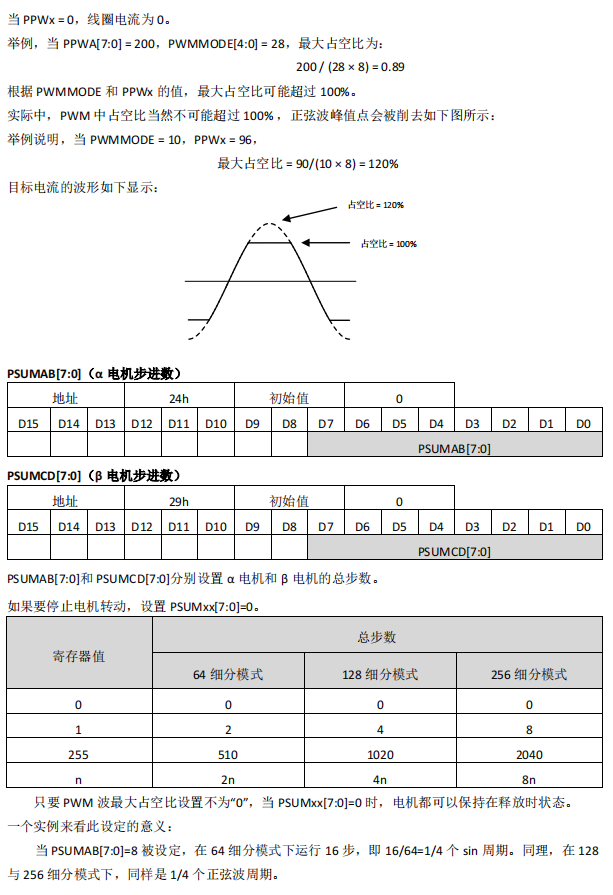
PSUMAB[7:0](步进电机步进数,地址 24h)
1 个 VD 的时间间隔内的电机的转动次数设置。
每次 VD 脉冲输入时,电机转动所设置的次数。因此,设置次数为“0”是可以停止电机的转动。
当设置的转动次数总额超过了 1 个 VD 脉冲的时间,超出部分会被取消。
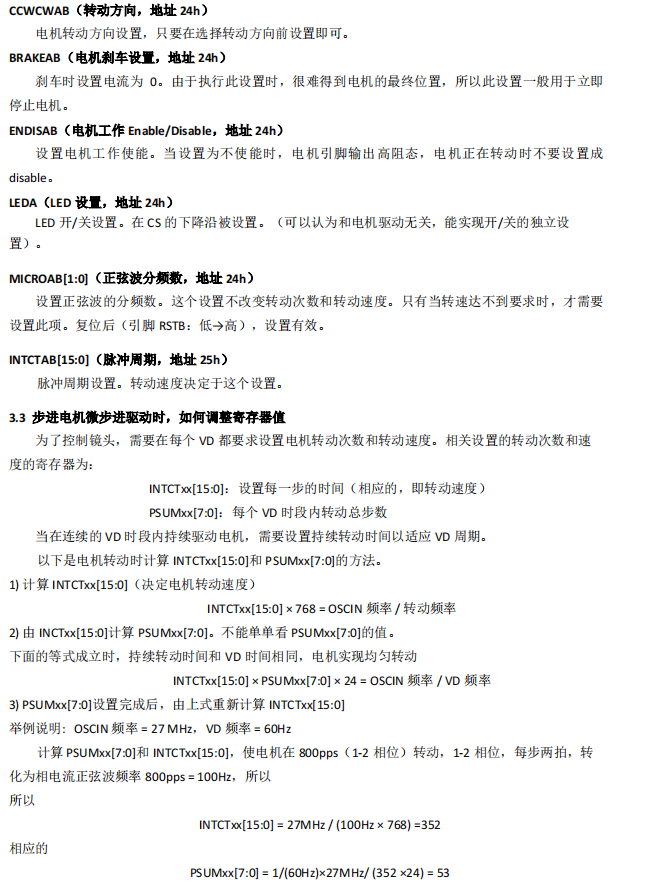
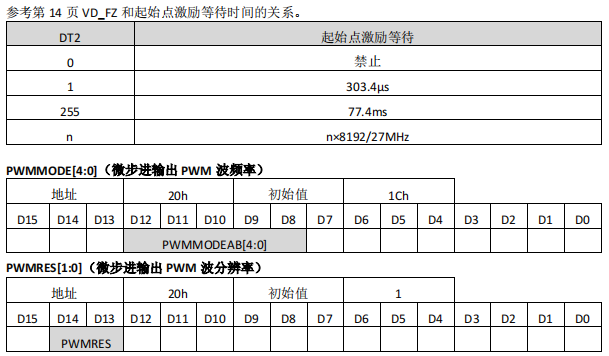
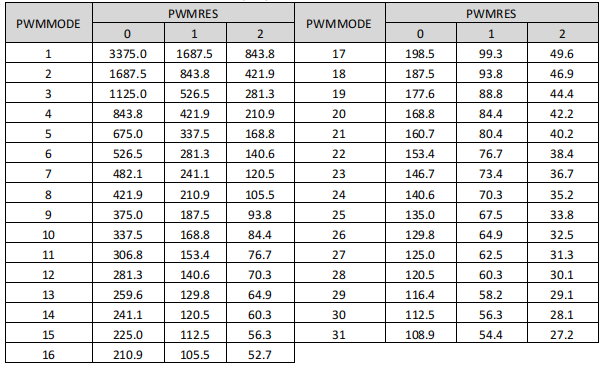
PWMMODE[4:0]通过设置系统时钟 OSCIN 的分频数来设置微步进输出 PWM 的频率。
PWMMODE[4:0]能在 131 的范围内设置,PWM 波的频率在 PWMMODE = 0 和 PWMMODE = 1 时候的取
值是一样的。
PWMRES[1:0]与 PWMMODE[4:0]一起决定 PWM 频率。
PWM 频率由下面的式子进行计算
PWM 频率 = OSCIN 频率 / ((PWMMODE × 23 ) × 2PWMRES)
OSCIN = 27MHz 时,PWM 的频率如下表: (kHz)
如有需求请联系——三亚微科技 王子文(16620966594)
如有需求请联系——三亚微科技 王子文(16620966594)
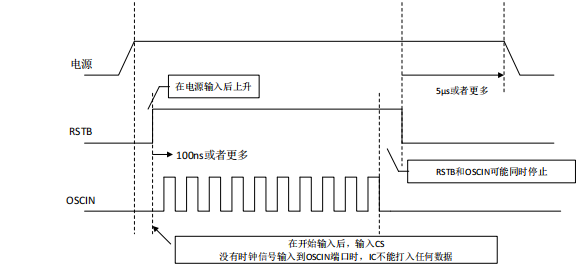
(1) 开始结束时序
电源信号、RSTB 和 OSCIN 的开始结束时序如下图所示:
(2) 输入引脚的输入电容
输入引脚的电容值为 10pF 或者更小。
(3) OSCIN 和 VD 信号的时刻
一旦 VD 信号(VD_FX 或者 VD_IS 输入)和 OSCIN 同步,那么 VD 信号和 OSCIN 信号对输入时刻没
有约束。
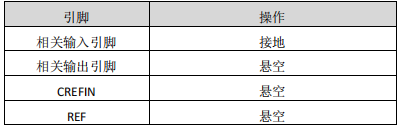
(4) 掉电模式
当 PDWNB = 0,掉电模式被设置。
掉电模式下,光圈模拟部分的威廉希尔官方网站 停止工作(电机驱动不受影响)。当只有电机驱动在使用时,
设置 PDWNB 为“0”可以减少功耗。
掉电模式下,相关引脚的操作如下:
典型应用威廉希尔官方网站 图
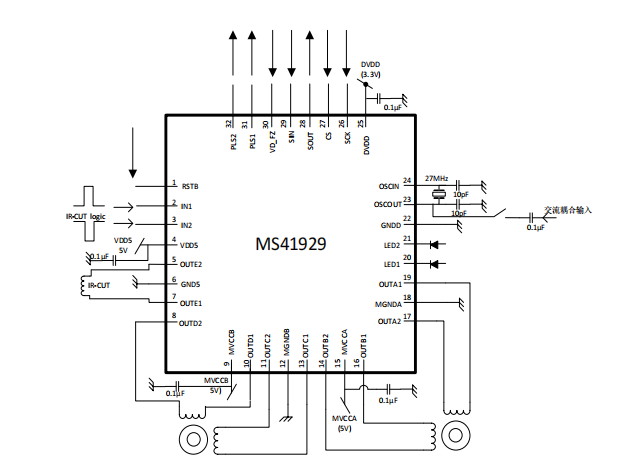
注:应用中 MS41929 Pin23, 24 接 27MHz 无源晶振, 也可以从 Pin23 外接 27MHz 时钟输入。注意,直
流耦合输入时钟幅度需要超过 2.4V,接 0.1μF 电容耦合交流输入时,输入时钟幅度需要超过 1V。
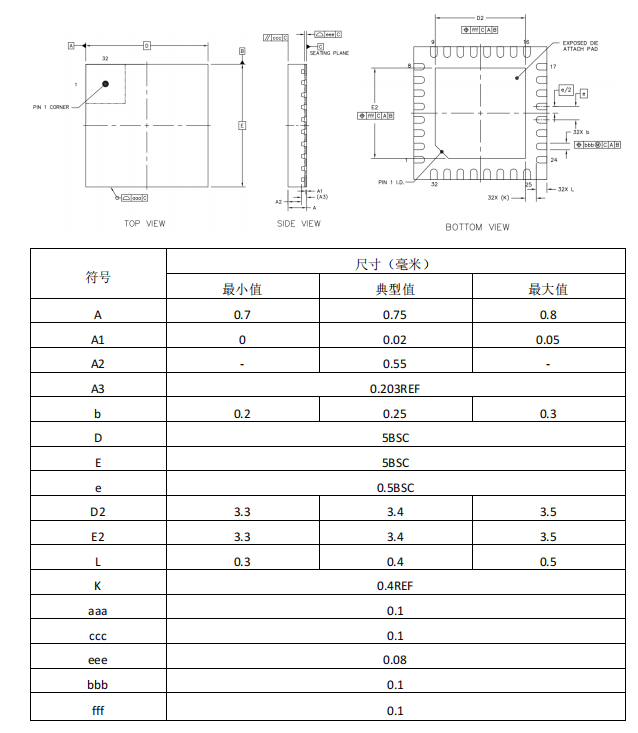
封装外形图
QFN32
——爱研究芯片的小王
审核编辑 黄宇
- 相关推荐
- 电机驱动
-
步进电机驱动芯片2019-02-16 0
-
杭州瑞盟原装MS35775 低噪声 256 细分微步进电机驱动,替代进口TMC2208可提供样品,有哪位大神用了?2021-04-09 0
-
瑞盟 MS41929驱动IC2021-07-08 0
-
低噪声 256 细分微步进电机驱动2023-03-29 0
-
瑞盟MS41929步进电机驱动IC使用心得2023-03-17 792
-
MS41929双通道5V低压步进电机驱动芯片2023-03-20 499
-
两相步进电机马达驱动芯片MS35776,低噪声256细分微步进电机驱动2023-04-03 682
-
低噪声 256 细分微步进电机驱动MS357742023-04-07 417
-
MS41929—双通道超低噪声 256 细分微步进低压电机驱动2023-05-15 664
-
国产,低噪声 256 细分微步进电机驱动MS35774/MS35774A2023-07-11 998
-
MS35774/MS35774A低噪声 256 细分微步进电机驱动2023-08-15 550
-
TMC5130A-TA国产替代、低噪声、256细分微步进电机驱动2023-11-14 1420
-
MS41959——低噪声、256 细分、微步进电机驱动2024-10-14 338
-
MS41919——双通道超低噪声 256 细分微步进低压电机驱动2024-10-25 266
-
MS41949——四通道、超低噪声、256 细分、低压 5V、微步进电机驱动2024-11-18 364
全部0条评论

快来发表一下你的评论吧 !
