

“亦”真“亦”假?——MXsteerWheel与DYNA4的强强联手
描述
作者 | Jo
小编 | 不吃猪头肉
高性能力反馈方向盘MXsteerWheel作为线控转向开发的新帮手,在北汇信息的展台上一直是大家关注的焦点。由于它简练出众的外表与真实阻尼的手感,吸引参展的朋友都乐此不疲地进行尝试。而后又不禁感叹,亦真亦假!

图1 桌面式驾驶模拟器

系统组成
整体来看,驾驶模拟器由CANoe测试平台、高性能实时机、方向盘电机与控制中枢,三者构成测试闭环。不过,在系统中,有位“扫地僧”在暗自发力,它就是虚拟车辆仿真软件(含转向模型)。其不仅为方向盘提供实时动力学响应,还让驾驶员可通过动画来观测车辆行径。真实的手感体验,离不开它,让我们一探究竟。
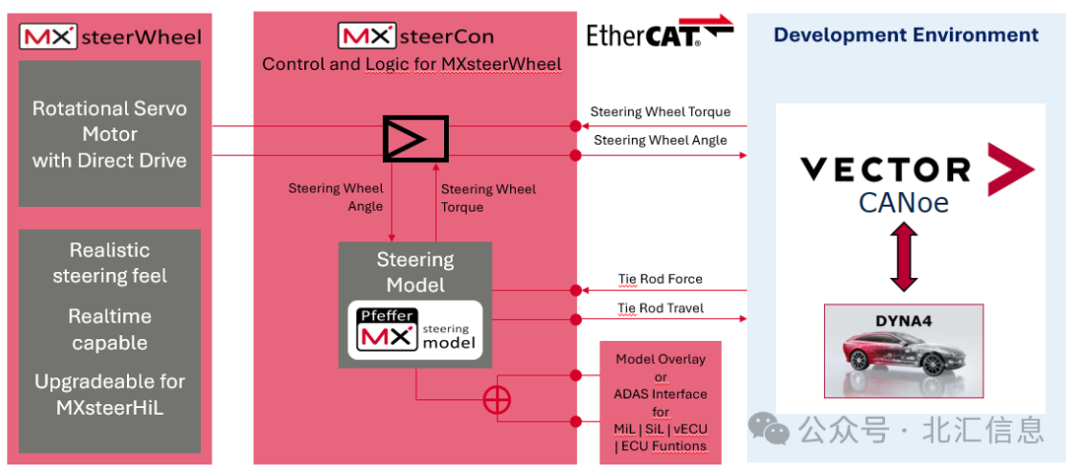
图2 系统交互概念

MdynamiX转向模型
MXsteerWheel采集的驾驶员方向盘角度传输给控制中枢MXsteerCon,其中包含了由Pfeffer教授团队开发的转向模型MXsteering Model。该模型为实时的三自由度模型,常用于EPS和HPS的转向手感仿真和分析,并支持集成ADAS接口,或自定义ECU功能,如反馈手感算法和车道保持功能。
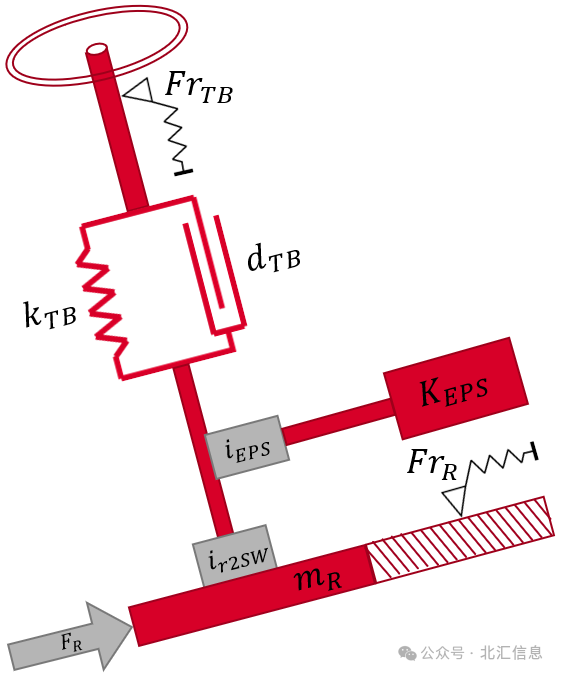
图3 MXsteering模型
在与DYNA4的集成中,该模型根据转向角度计算出齿条位移,通过EtherCAT通信协议传输给CANoe,在CANoe中以系统变量的形式再发送给DYNA4中。由于DYNA4与CANoe的集成高度简洁,只需要在DYNA4中关联上相应的系统变量,一键编译后生成虚拟节点挂载在CANoe中,模型数据便能低时延传输,保证实时性。
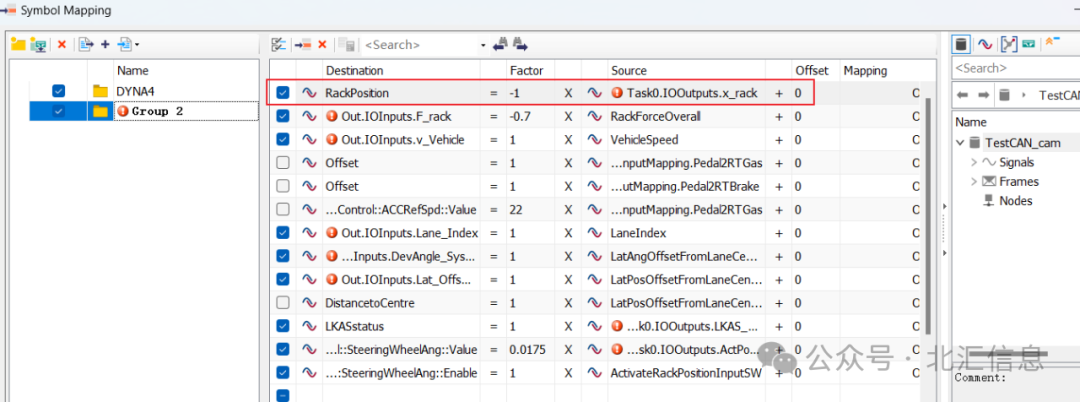
图4 系统变量关联
DYNA4也自带转向模型,包括转向柱和带有静摩擦模型的转向传统装置,支持齿轮齿条式和摇臂拉杆式两种不同的机械结构形式,前者常用于乘用车,后期应用于商用车和卡车。
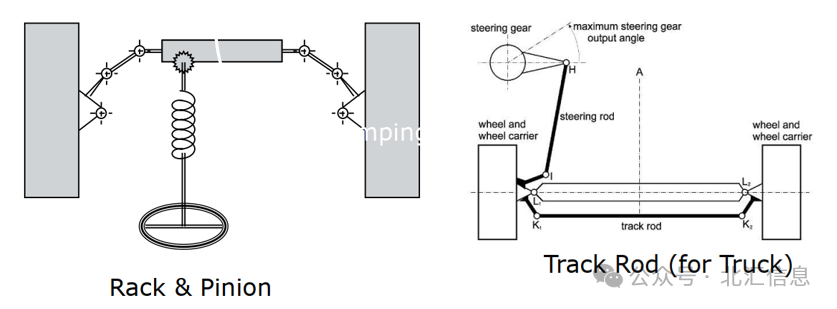
图5 DYNA4中转向模型类型

DYNA4车辆动力学模型
DYNA4将接收到的齿条位移再传输到自身的多体动力学底盘中,底盘模型结合道路环境、轮胎、动力传动等综合信号,计算出最终作用在传动轴上的负载力,并将此值再回传给手感方向盘。简易的信号交互形式,让工程师非常方便地获取诸如车身姿态等信息,来进行例如主动回正功能的测试。
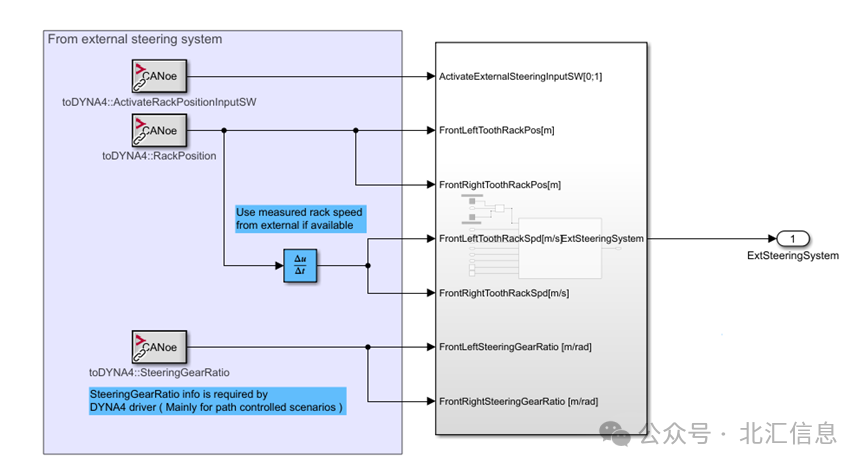
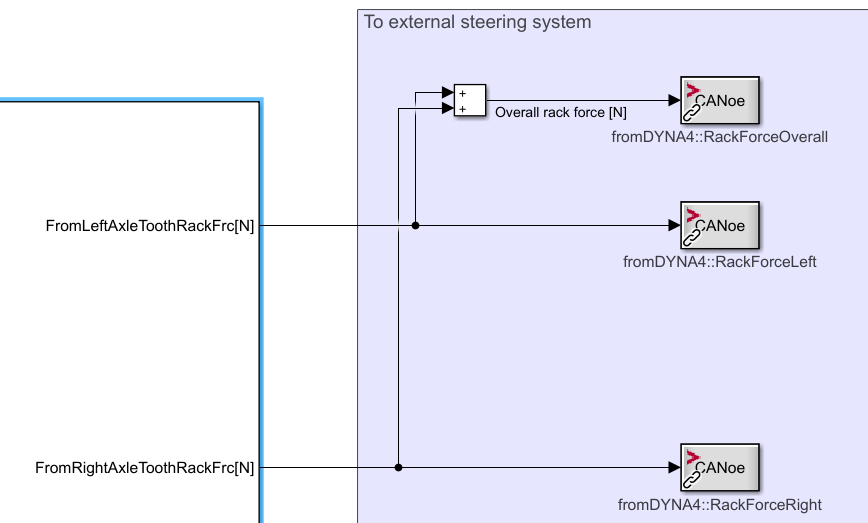
图6 DYNA4模型与CANoe信号交互
此外,DYNA4与整个转向总成配合得也非常好。对于常见的EPS测试,亦或是针对传统或者线控转向结构,都可以进行SiL、HiL的仿真测试。
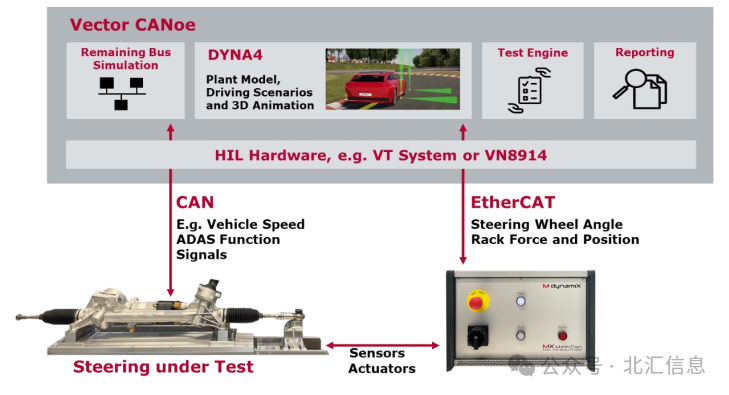
图7 DYNA4与转向总成
以乘用车为例,齿轮齿条式转向系统由一对齿轮组成,将方向盘的角度转换为转向齿条的平移运动,并可以设置转动刚度、阻尼、摩擦阻力、转动惯量、左右两端传动比、万向节传递(不等速传递特性),以及不同EPS助力形式。
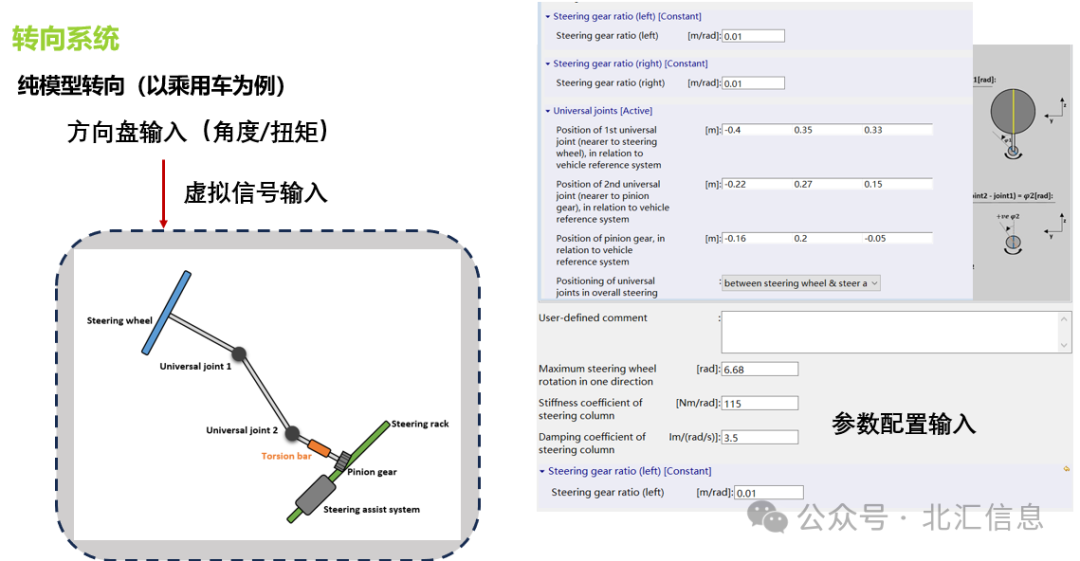
图8 DYNA4中齿轮齿条式转向
DYNA4也支持前后四轮转向。如下图为主车前、后两轴实现多轮转向,同时全挂拖车的前轴随转,半挂式拖车同样也支持。
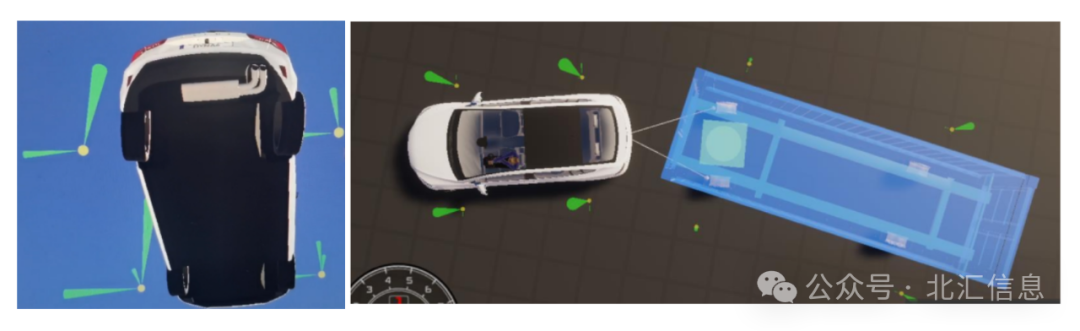
图9 DYNA4四轮转向
DYNA4自身包含丰富的场景库,也提供道路编辑功能,支持用户自行搭建测试赛道。其动画显示采用游戏引擎Unity渲染,最高可达4K分辨率。不同视角的自由切换,帮助工程师更好地观测车辆行为。
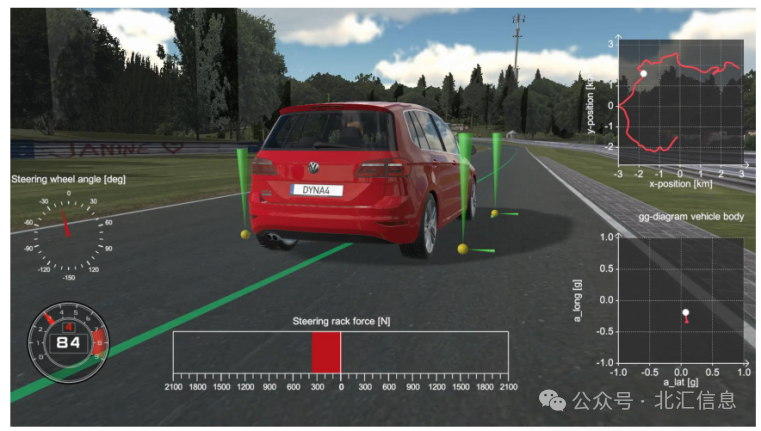
图10 DYNA4中的道路
在ADAS领域,DYNA4提供交通(Traffic)功能。不同的交通场景包括若干同道车辆以及障碍物。交通车辆支持多种驾驶任务,比如触发的车速变化,触发的变道或者这些动作的组合。从DYNA4 R8开始也支持使用OpenSCENARIO来定义和模拟复杂的驾驶场景。通过虚拟测试,自动驾驶和驾驶辅助系统能够在安全、高效、低成本的条件下进行验证与优化,为系统在真实道路上的应用奠定基础。

LKAS演示
以车道线保持功能LKAS(Lane Keeping Assist System)为例,通过观测动画以及力反馈方向盘的主动转动,验证控制策略实施的效果。LKAS算法接收车道线信息,若识别到脱离行驶车道的行为,会控制电机输出转向力矩来修正行驶方向,使车辆处于正确的车道上,同时可以集成脱手检测功能,例如若驾驶员超过20S未接管方向盘,将自动退出保持,直至检测到驾驶员手力矩的输入。此外,也可以加入摄像头来识别前方车辆,进行自适应巡航(ACC)或者主动紧急制动(AEB)功能的验证。
北汇信息依托⼗多年技术积累和项⽬经验,可以为OEM和零部件件企业提供全域全链的汽⻋电⼦测试解决⽅案,涵盖五⼤域,从模型、代码、HiL台架到实⻋测试需求。如需了解更多北汇信息的产品和服务,请随时联系我们。期待与您的交流!
注:文章部分图片来源于Vector。
-
MXsteerWheel与DYNA4的强强联手#ADAS #智能驾驶 #线控转向北汇信息POLELINK 2024-11-19
-
华为与美的的强强联手或将引领进智能家电时代2019-08-21 3164
-
鸿蒙系统不再“孤军奋战” 华为、美的强强联手2021-02-25 1265
-
车辆动力学虚拟仿真环境平台DYNA4的新特性介绍2022-11-25 3687
-
【文章转载】车辆动力学及场景建模软件DYNA4新特性介绍2022-12-02 1809
-
DYNA4集成SUMO在CANoe中实现V2X三维场景2023-10-18 2119
-
聊聊车辆仿真软件之DYNA4——Overview2023-10-19 964
全部0条评论

快来发表一下你的评论吧 !
