

MATLAB和Simulink助力智能底盘技术革新
描述
MATLAB 为工程师提供了一个强大的平台,用于整车系统的虚拟化开发。通过这一平台,工程师能够高效地构建和测试车辆模型,优化控制算法,并在虚拟环境中进行全面的系统验证。这不仅加速了开发流程,还确保了车辆系统在发布前的安全性和可靠性。
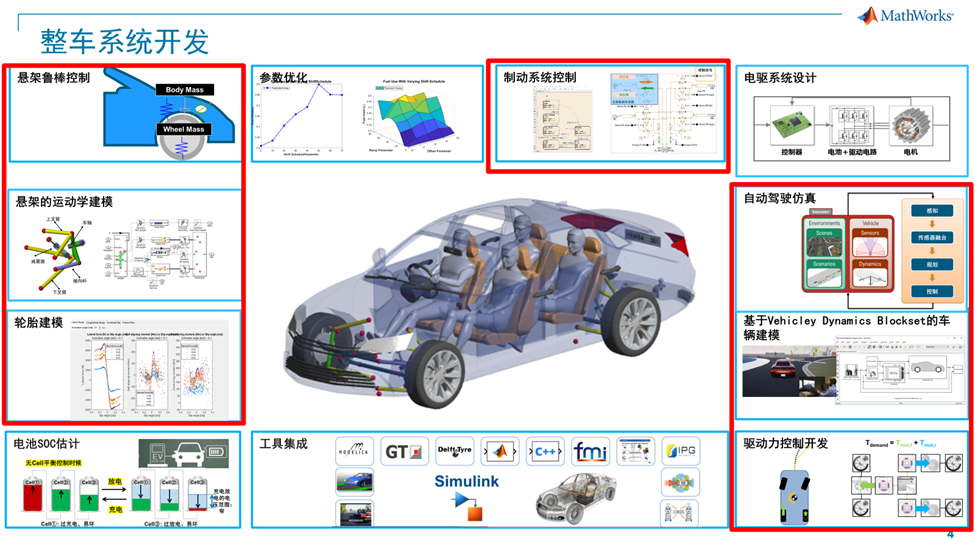
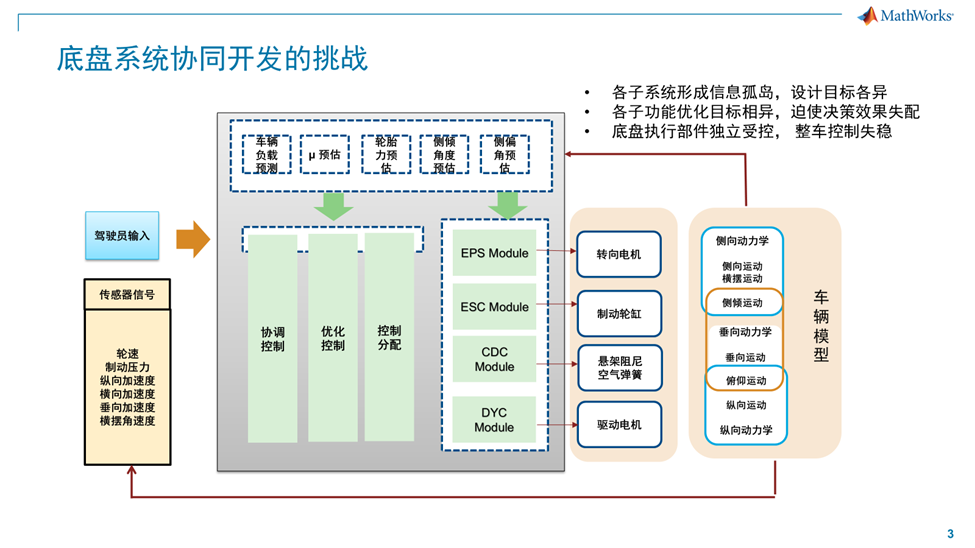
在众多整车开发的难点中,智能底盘系统因其涉及范围广泛而尤为复杂,超出了以往系统开发的范畴。它不仅需要整合多个子系统,如制动、转向、悬架等,还涉及自动驾驶和电动化等前沿技术的深度融合。因此,开发智能底盘系统对工程师提出了更高的要求,需要跨学科的知识和创新的解决方案。
MathWorks 于 11 月 12-14 日参加了由中国汽车工程学会(CSAE)在重庆举行的 2024 国际电动汽车智能底盘大会,并发表了相关演讲。
《智能底盘的虚拟化开发及验证》 演讲摘要
随着电动化、智能化和自动驾驶技术的进步,底盘技术的重要性日益增加,对高集成度、优化控制和跨域融合的需求成为提升车辆性能的关键。 MATLAB/Simulink 的结合为底盘控制系统开发提供了先进的工具和仿真平台,通过整合虚拟仿真,数据科学和基于模型的设计,支持新一代底盘架构及控制设计。包括复杂的集成控制系统设计,分布式驱动系统开发,以及集成制动、转向和悬架的设计开发,以提升车辆稳定性和安全性;自动驾驶算法的开发和测试,实现与底盘控制系统的紧密集成;以及使用 Simulink 的虚拟车辆仿真平台进行测试和验证,减少实车测试需求,加速开发流程,确保系统在发布前的安全性和可靠性。 通过 MATLAB 和 Simulink,开发者可以:
快速构建反映真实动态行为的虚拟车辆模型
设计车辆状态估计算法优化控制策略设计
集成自动驾驶场景
利用仿真环境和自动化测试功能
这些功能在开发前期进行全面系统验证,确保设计要求的满足。此外,MATLAB 解决方案还促进跨学科团队协同,加速产品上市。 ▼ 扫描下方二维码,立即获取大会演讲资料!
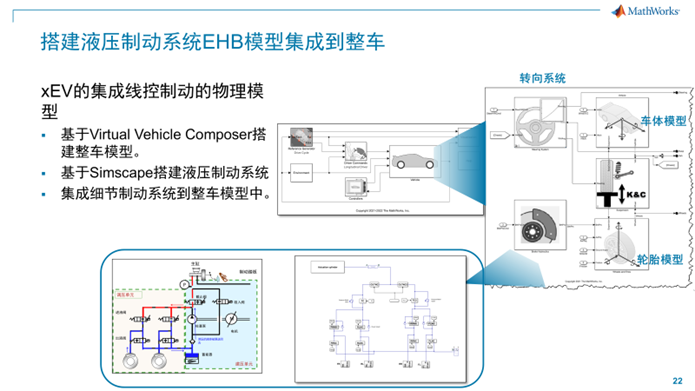
▼ 此外,在部件层级,基于 MATLAB 平台搭建虚拟整车模型,并借助 Simscape 的物理建模完成部件建模,用以开发底盘的制动、转向、悬架系统。 xEV 集成制动系统的开发。 通过整车建模验证集成线控制动系统与电机制动扭矩的协调控制,开发者可以实现 EHB 系统的液压系统建模与控制,并开发 ABS 和 ESC 系统的先进控制算法。通过将这些系统模型有效地集成到整车中,开发者能够在各个环节应用基于模型设计的策略。
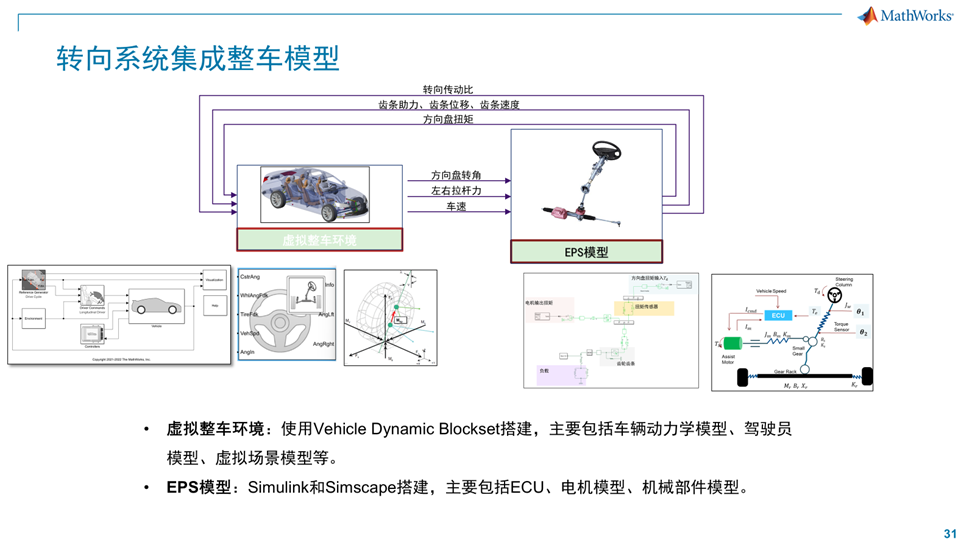
参考内容 浅谈基于 MATLAB 仿真的车辆协调再生制动控制策略与集成线控制动系统开发 在转向系统开发方面,MATLAB 平台提供了全面的支持。开发者可以使用 Simscape 搭建转向系统部件模型,快速开发转向电机模型及控制算法,并通过系统辨识和控制理论设计助力转向电机控制。整车模型的搭建及转向系统的集成进一步确保了开发的高效性。
从部件到整车,MATLAB 还支持悬架系统的开发。通过悬架系统建模,开发者可以在部件层级上开发并验证主动悬架的控制算法,实现良好的平顺性。将悬架模型外特性仿真结果集成到整车模型中,对整车系统进行建模,分析悬架系统对整车舒适性和操稳性的影响。MATLAB 产品在车辆仿真工作流上的支持,包括模型准确性对标和自动化测试等,进一步推动了智能底盘的创新与发展。 MATLAB 和 Simulink 正成为智能底盘开发者的得力助手,助推未来出行的创新与发展。
-
什么是MATLAB SIMULINK?Simulink有哪些应用实例?2021-07-02 0
-
基于MATLAB/Simulink的系统仿真技术与应用2008-06-19 0
-
MATLAB、SIMULINK、FPGA是什么2021-07-12 0
-
基于MatLab/Simulink的GPS系统仿真2010-02-08 707
-
威廉希尔官方网站 实验与Matlab/Simulink仿真2010-04-14 1025
-
基于MATLAB Simulink的系统仿真技术与应用 教材2010-04-29 1229
-
Matlab-Simulink教程集合(文档)2016-08-23 781
-
快速发展的无线标准以及如何应对技术革新者们面临的困境2017-11-17 813
-
人工智能全面加速安防智能化技术革新2017-11-27 3498
-
高通剑指下一代智能手机技术革新的关口———人工智能2018-01-09 3113
-
基于dSPACE_MATLAB_Simulink平台的实时仿真技术的研究2021-09-15 662
-
基于Matlab simulink的蓄电池双向DCDC控制模型2021-09-28 1530
-
深耕技术革新,华为云构建优质CDN服务2022-10-22 680
-
讲解MATLAB/Simulink HDL使用入门2023-11-06 1353
-
分享两则MATLAB和Simulink助力教学案例2024-12-05 313
全部0条评论

快来发表一下你的评论吧 !
