

特斯拉CEO马斯克再批激光雷达,纯视觉方案才是自动驾驶的未来
电子说
描述
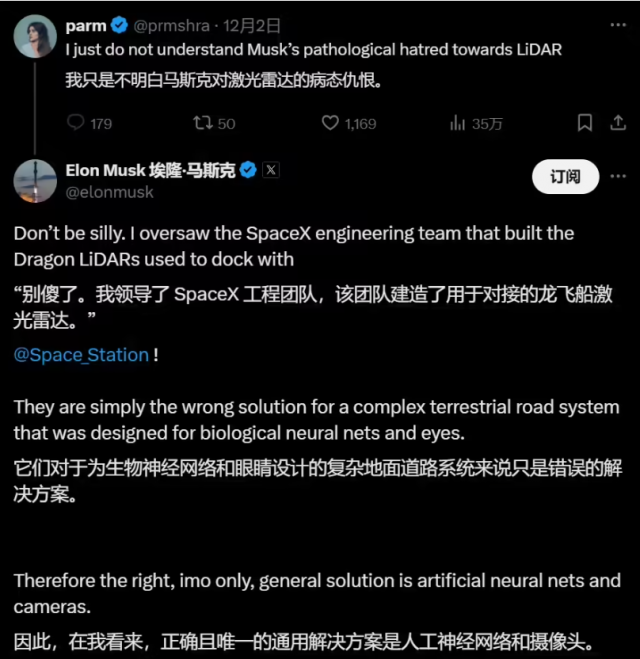
近日,特斯拉的首席执行官埃隆·马斯克再次公开批评激光雷达技术,直言其为“错误的解决方案”,并重申了其一贯的观点:在复杂的道路驾驶环境中,模拟生物神经网络和眼睛的视觉系统才是最为有效的方式。这一言论再次引发了业界对自动驾驶技术路线的广泛讨论。
马斯克在多个场合都曾表达过对激光雷达的批评。他认为,激光雷达虽然能够提供高精度的距离和障碍物信息,但其高昂的成本、复杂的系统架构以及与视觉系统结合时可能产生的“感知不一致性”等问题,使得激光雷达并非自动驾驶的最佳选择。相反,特斯拉坚持的纯视觉方案,通过摄像头实时采集路况信息,并借助视觉神经网络将图像转化为三维场景,再由自动驾驶计算机进行分析和决策,具有更高的成本效益和可靠性。
特斯拉的这一理念在其车型中得到了充分体现。该公司已决定在所有车型中取消毫米波雷达,完全依赖摄像头与人工神经网络来实现自动驾驶功能。马斯克认为,这种纯视觉方案不仅更为简洁,而且在感知精度和可靠性上远超激光雷达与雷达、视觉结合的方案。他指出,当雷达与视觉感知数据发生冲突时,系统难以判断应该信任哪一方,这种不确定性是自动驾驶系统无法接受的隐患。而纯视觉方案则能够避免这一问题,因为视觉系统能够像人类驾驶员一样,通过实时采集和分析路况信息,做出准确的驾驶决策。
然而,并非所有人都认同马斯克的观点。国内多数汽车制造商和供应商采用的是融合感知方案,这种方案结合了激光雷达、摄像头、毫米波雷达等多种传感器,旨在增强系统的冗余性和感知能力。一些专家认为,激光雷达具有超远距离探测和三维立体空间扫描的能力,能够为自动驾驶系统提供更丰富的环境信息,从而提高系统的安全性和可靠性。
尽管如此,马斯克依然坚持认为,纯视觉方案才是自动驾驶的未来。他指出,随着技术的不断进步和成本的降低,视觉系统将在自动驾驶领域发挥越来越重要的作用。特斯拉将继续致力于优化和完善其纯视觉方案,为消费者提供更加安全、便捷、高效的自动驾驶体验。
此次马斯克的言论再次引发了业界对自动驾驶技术路线的关注和讨论。未来,随着技术的不断发展和市场的不断变化,自动驾驶技术将呈现出更加多元化和竞争化的格局。无论是纯视觉方案还是融合感知方案,都将为自动驾驶技术的发展和进步贡献自己的力量。
审核编辑 黄宇
-
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观2021-03-18 0
-
谈一谈自动驾驶的激光雷达2021-06-17 0
-
马斯克反对在特斯拉autopilot设计中引入激光雷达2018-04-30 674
-
马斯克反对特斯拉自动驾驶汽车使用激光雷达2018-04-23 794
-
特斯拉不用激光雷达 马斯克在自动驾驶技术方向错了吗?2018-07-02 6150
-
特斯拉不使用激光雷达的自动驾驶汽车到底有什么看头2018-07-22 2082
-
马斯克:依靠激光雷达的自动驾驶公司都注定失败2019-04-25 3183
-
马斯克怒怼激光雷达技术引众怒,多传感器融合才是王道2019-05-06 377
-
激光雷达vs纯计算机视觉 自动驾驶的两大流派2019-05-22 10473
-
激光雷达在自动驾驶技术中的发展情况分析2019-12-30 4364
-
Luminar: 特斯拉是其最大激光雷达客户2024-05-08 366
-
马斯克称特斯拉的FSD系统不需要激光雷达2024-05-14 1087
-
狂踩激光雷达的马斯克,如今竟成Luminar的榜一大哥?2024-05-28 154
-
激光雷达与纯视觉方案,哪个才是自动驾驶最优选?2024-09-29 479
-
马斯克重申:纯视觉是自动驾驶的未来2024-12-04 452
全部0条评论

快来发表一下你的评论吧 !
