

突破限制 如何打造一个更符合远距离作业需求的无人机?
描述
无人机无论是在战争还是我们的日常生活中都有着重要作用,随着应用场景的不断扩大,无人机也不再是进行简单的承担载物、充当摄像头等基础性工作,更多时候需要远程作业,替代人工进行一些危险性的工作。
而满足这些工作的一项基础就是需要图像传输。
例如在近些年的俄乌战场上,FPV穿越机一定程度上替代着精确制导导弹、信息侦察兵等传统需要大量人力物力支持的工作。
无人机进行这些各种能够大大提升效率,并且成本相对较低。但是也会存在很多问题:
1.FPV穿越机仍然需要人工手动操控
2.无人机很容易受到电子干扰
3.作用距离受限
针对前两个问题,可以利用人工智能和图像处理实现自动控制。
在无人机中安装带有AI算法的图像处理板,就能够帮助自主识别人、车、船等目标,并且可以进行锁定跟踪。
像慧视光电打造的国产化RK3588、RV1126系列芯片的图像处理板Viztra-HE030和Viztra-LE026就能够实现。

如果需要对特殊目标进行检测识别,慧视光电还可以提供专用的SpeedDP深度学习AI算法开发平台,快速对新的识别目标进行半自动化、自动化标注、算法效果评估和软件移植,缩短整个开发流程;这样飞抵目标上空时就可以自主选择目标进行检测和跟踪。
此外,图像处理识别打击还可以有效减少电子干扰的影响。
而对于作用距离的问题,一方面受制于带宽,一方面受制于整个链路的延迟时间比较长,慧视光电推出的基于RK3588的低延迟低带宽图传方案,可以很好地解决这个问题。
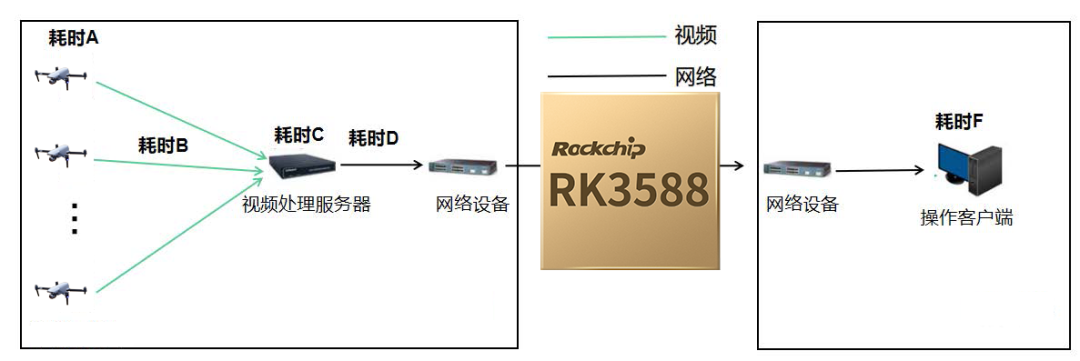
该方案编解码延迟只需要15ms,加上数据链30ms左右的延迟时间,整体时延能够控制在60ms左右(含相机、编解码、显示,不含传输),能够更方便实现实时控制 、实时打击。
同时只需要低至500K的通信带宽即可实现多路视频的低延迟回传和控制,增加FPV的飞行和控制距离,提升FPV的整体效能。
通过人工智能和低延迟图传技术的加入,无人机的远程作业效能将大大提升,能够更加精准的实现我们的一些目的。
-
植保无人机供电系统解决方案2016-04-23 0
-
限制无人机发展的因素有哪些2016-06-08 0
-
消费级还是工业级无人机,未来您更看好哪一个领域发展?2016-12-15 0
-
无人机侦测和反制系统2017-04-05 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
VxWorks操作系统在无人直升机控制系统有什么应用?2019-11-07 0
-
无人机远距离WiFi图传模块,无线音视频高清传输,智能安防预警应用2021-08-19 0
-
远距离WiFi传输模块,Mesh自组网通信系统, 无人机无线传输为应急现场保驾护航2021-09-11 0
-
CUAV推新品LTE LINK,突破无人机距离限制2018-08-14 5308
-
LakeDiamond利用人工钻石和激光发生器对无人机远距离无线充电2018-11-27 5214
-
手持无人机干扰器是一种远距离无人机拦截设备2021-05-31 2606
-
远距离WiFi模块在无人机系统的应用2021-07-02 2000
-
无人机链路系统的组成2023-05-29 17413
-
关于自连远距离Wi-Fi方案 这次就透露这么多2024-05-16 422
-
特信远距离反制无人机:定制化解决方案应对多元场景需求2024-10-12 152
全部0条评论

快来发表一下你的评论吧 !
