

发那科ROBOGUIDE机器人仿真助手入门
描述
发那科ROBOGUIDE
是一款强大的机器人仿真助手
专门为发那科机器人设计
本文给大家分享一下
ROBOGUIDE入门-创建项目
在开始操作前
要先安装好ROBOGUIDE软件
ROBOGUIDE创建项目
创建流程:
01 打开ROBOGUIDE
02 进入工作单元创建向导
03 等待软件生成,完成创建
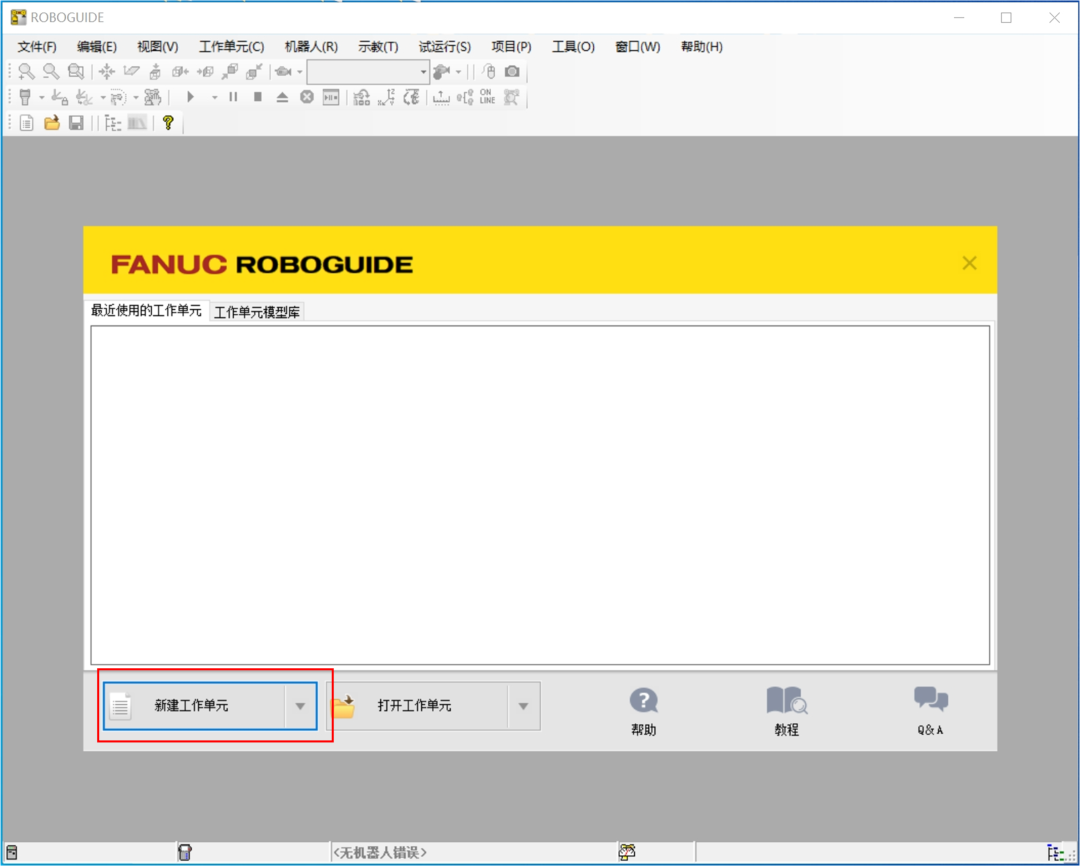
01 打开ROBOGUIDE
打开软件后,如下图所示。然后点击新建工作单元
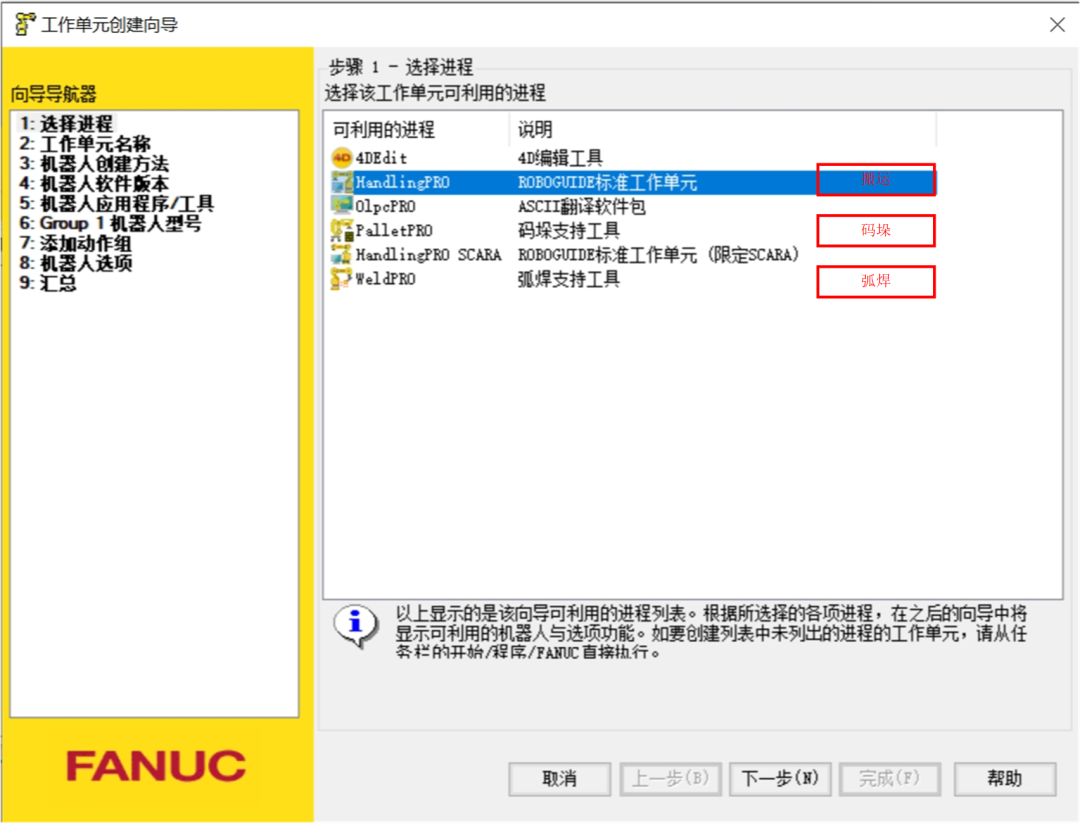
02 进入工作单元创建向导
2.1 在工作单元创建向导,选择“HandlingPRO”,即搬运工具(本例以搬运机器人进行举例说明),点击下一步;
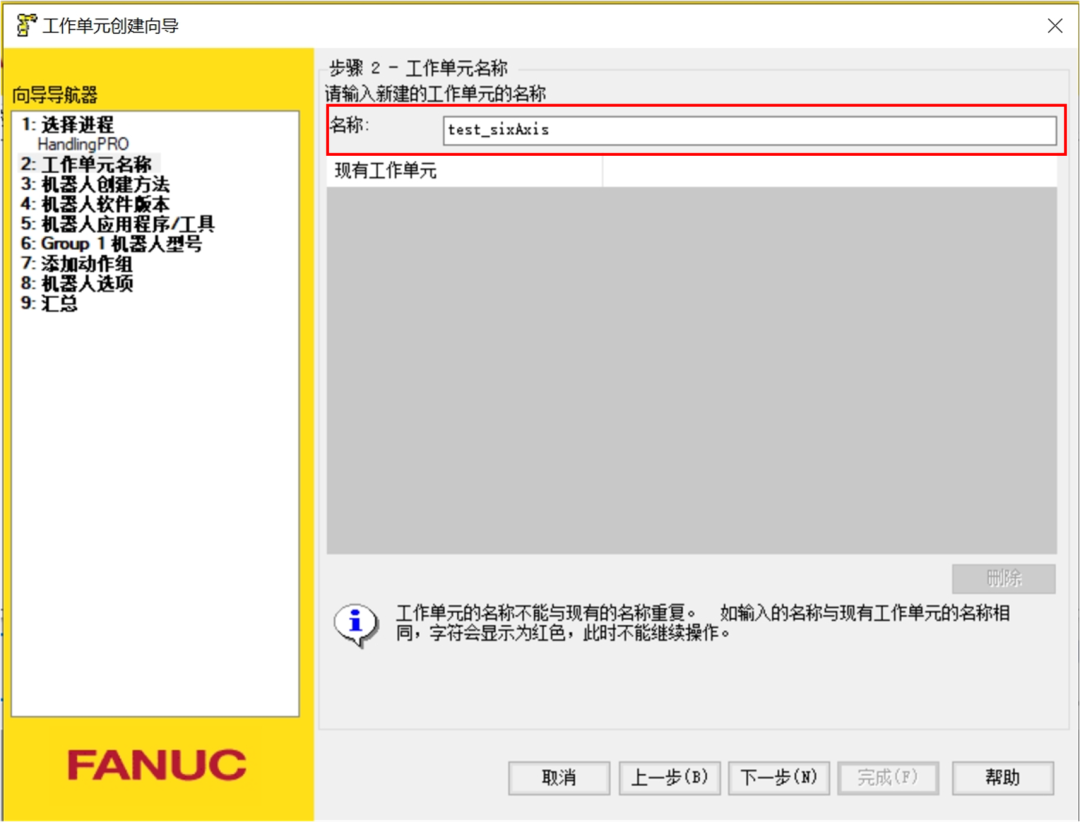
2.2 如下图所示,设置工作单元的名称,点击下一步;
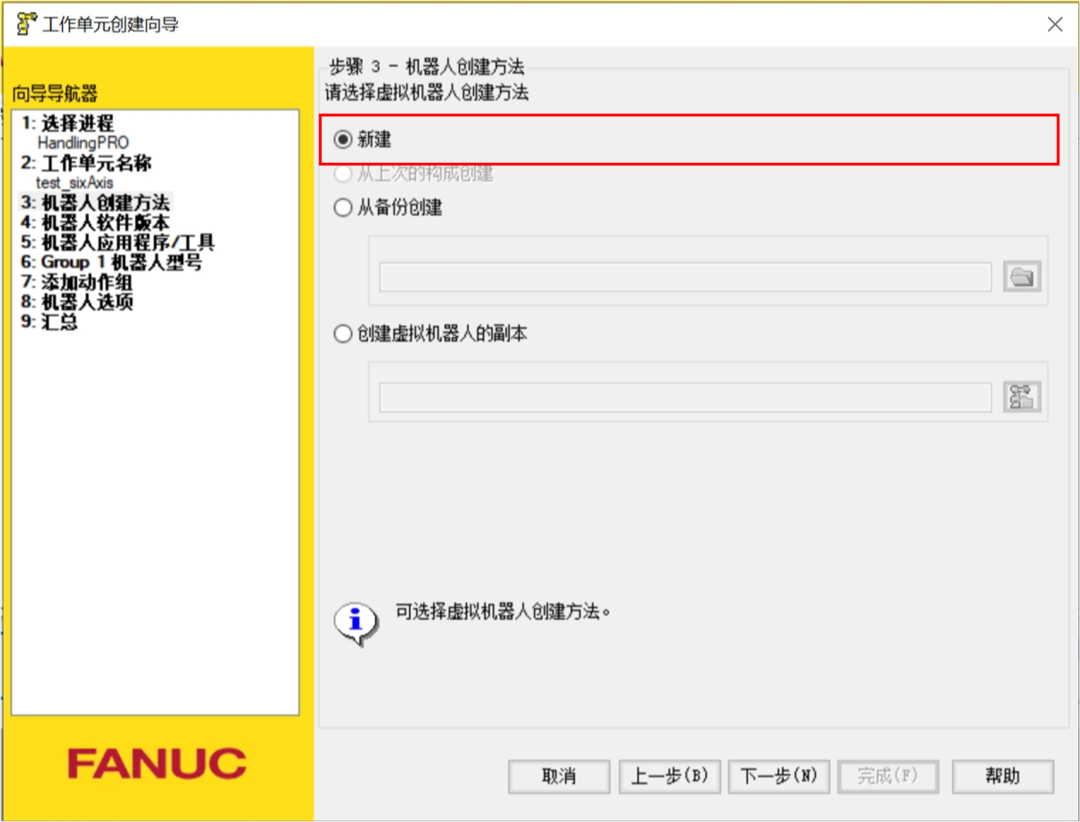
2.3 机器人的创建方法,选择新建,点击下一步;
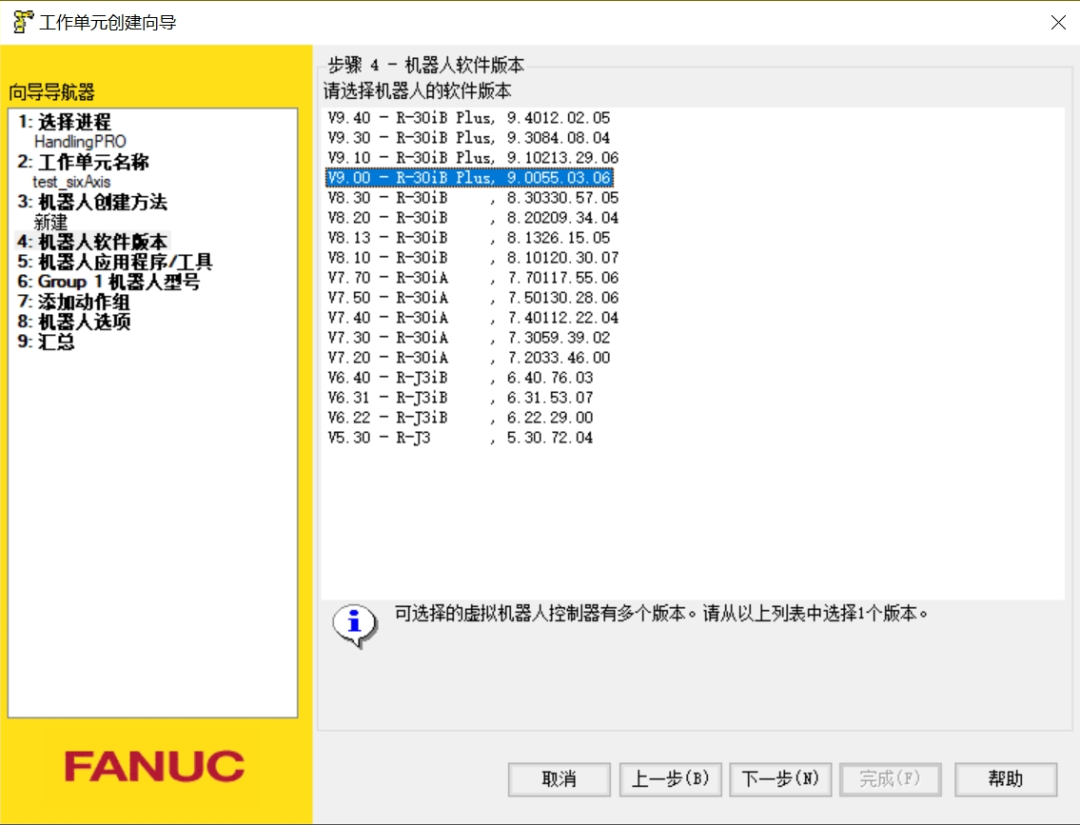
2.4 选择机器人软件版本(一般选择最高版本),这里以V9.00-R-30iB Plus为例,点击下一步;
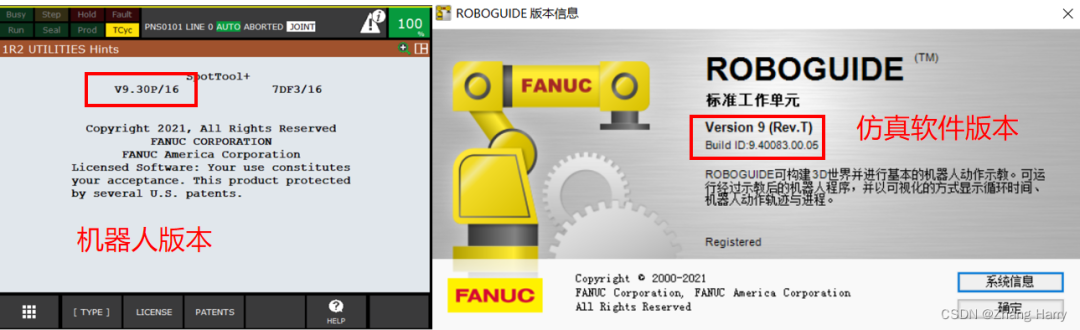
注:软件版本需要与现场机器人对应,如果想直接导入现场机器人的备份来生成一个仿真机器人,必须要Roboguide软件版本不低于现场机器人版本。比如V9.3、V9.4版本的软件可以打开V9.3机器人的备份,V9.1就不行。
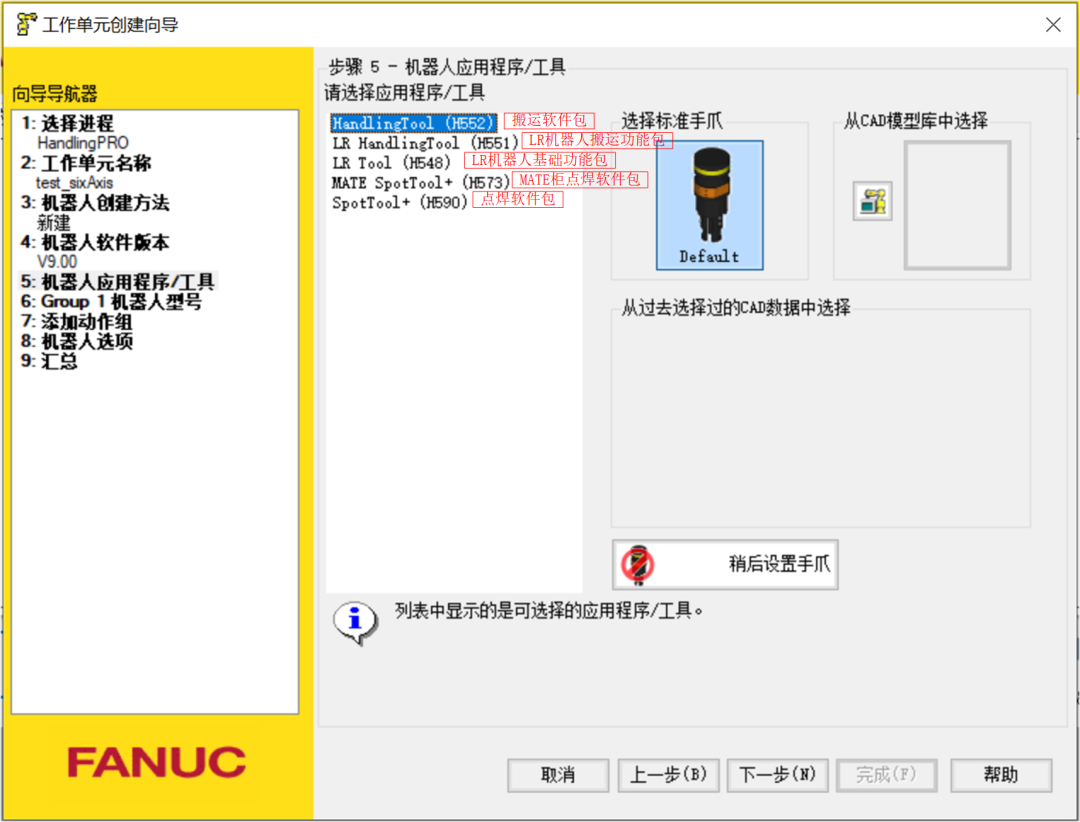
2.5 选择机器人应用程序,本文为搬运,所以选择搬运软件包,点击下一步;
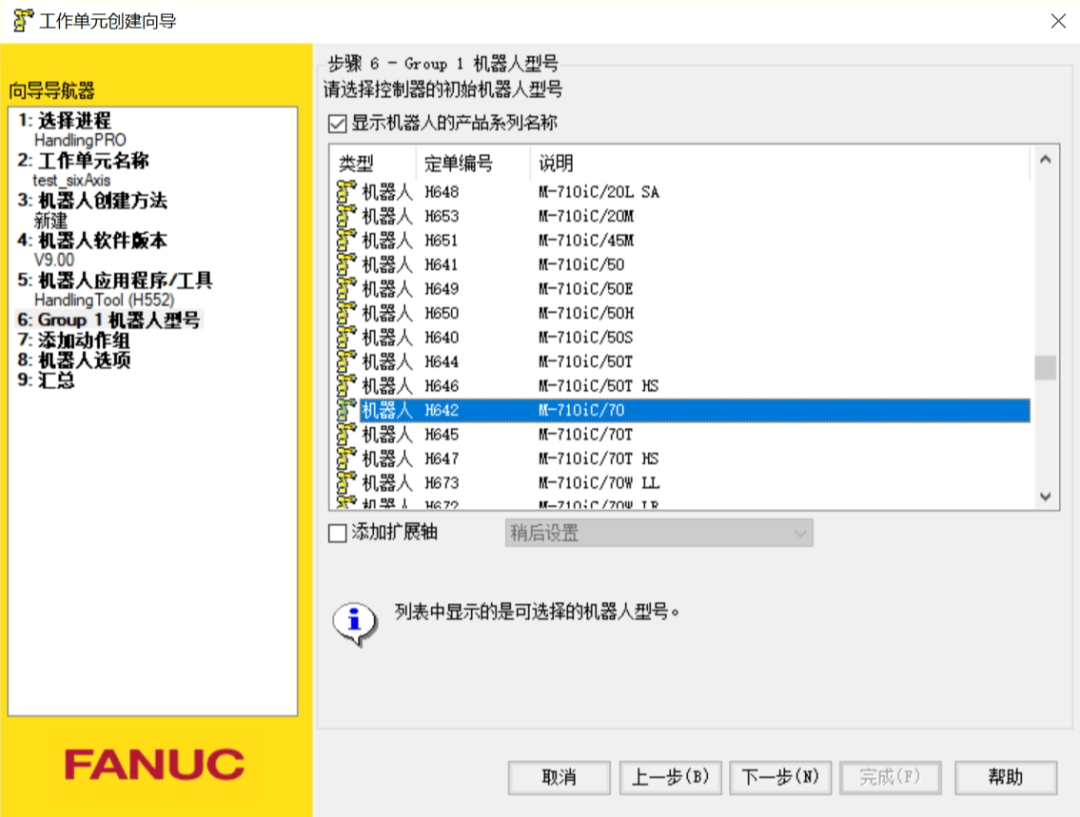
2.6 选择机器人型号(如果选型错误,可以在创建之后再更改),本文选择H642,点击下一步;
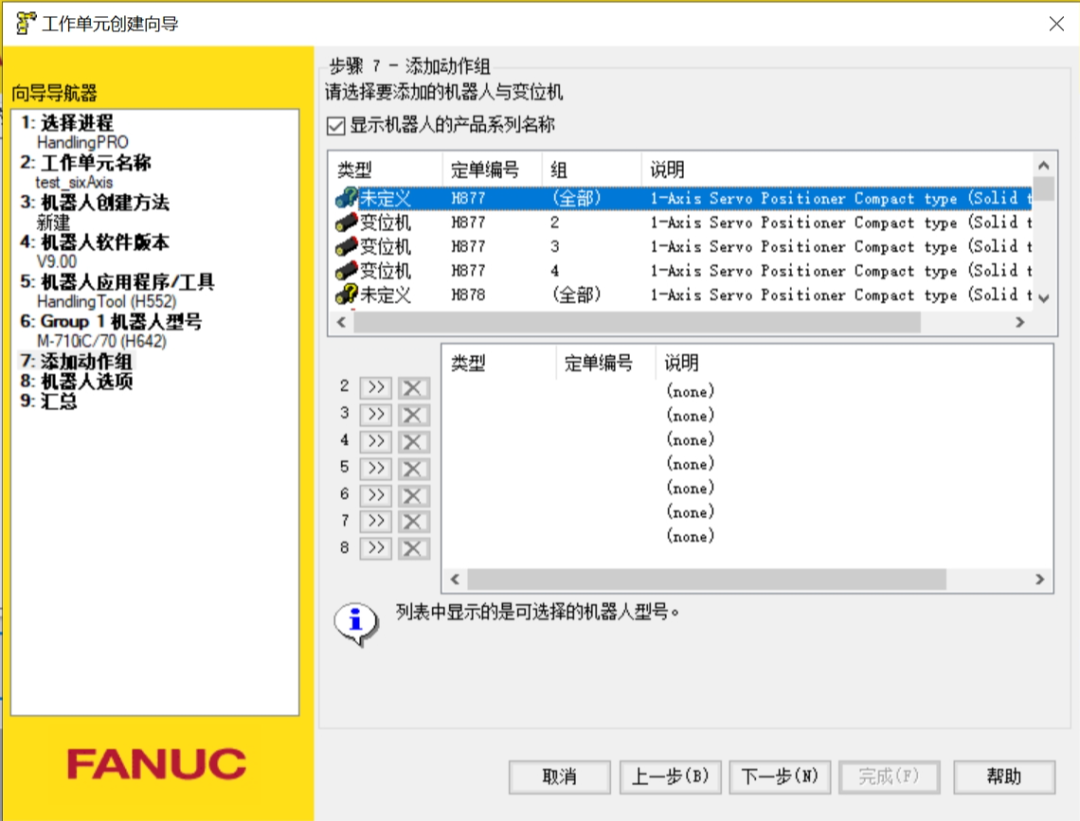
2.7 添加动作组,本文选择未定义H877,点击下一步;
添加完机器人本体后可以添加附加设备。可以选择在同一控制柜中继续添加额外的机器人(也可在建立Workcell之后添加),还可添加Group2~8的设备,如变位机等。
注意:
1.在添加Group2~8内的设备时需要依次添加,不能跳组;
2.在列表中选择变位机等设备时,设备信息中带有添加组限制的只能添加在限制的对应组内;
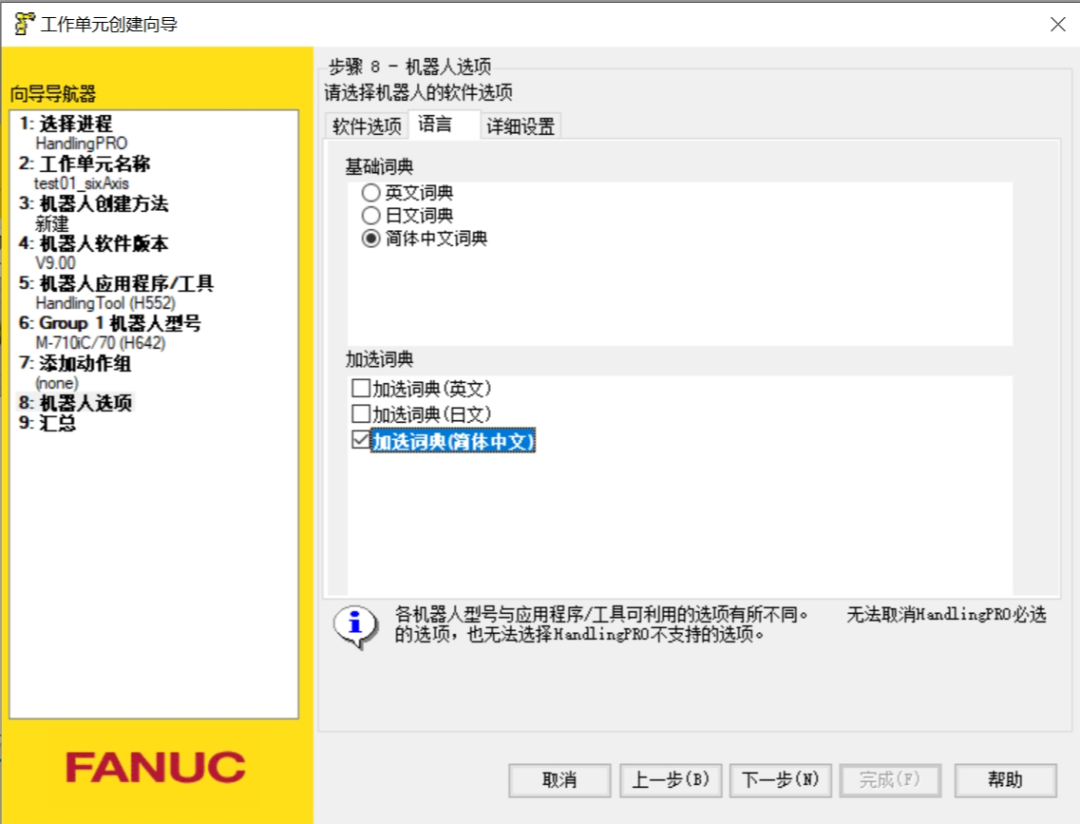
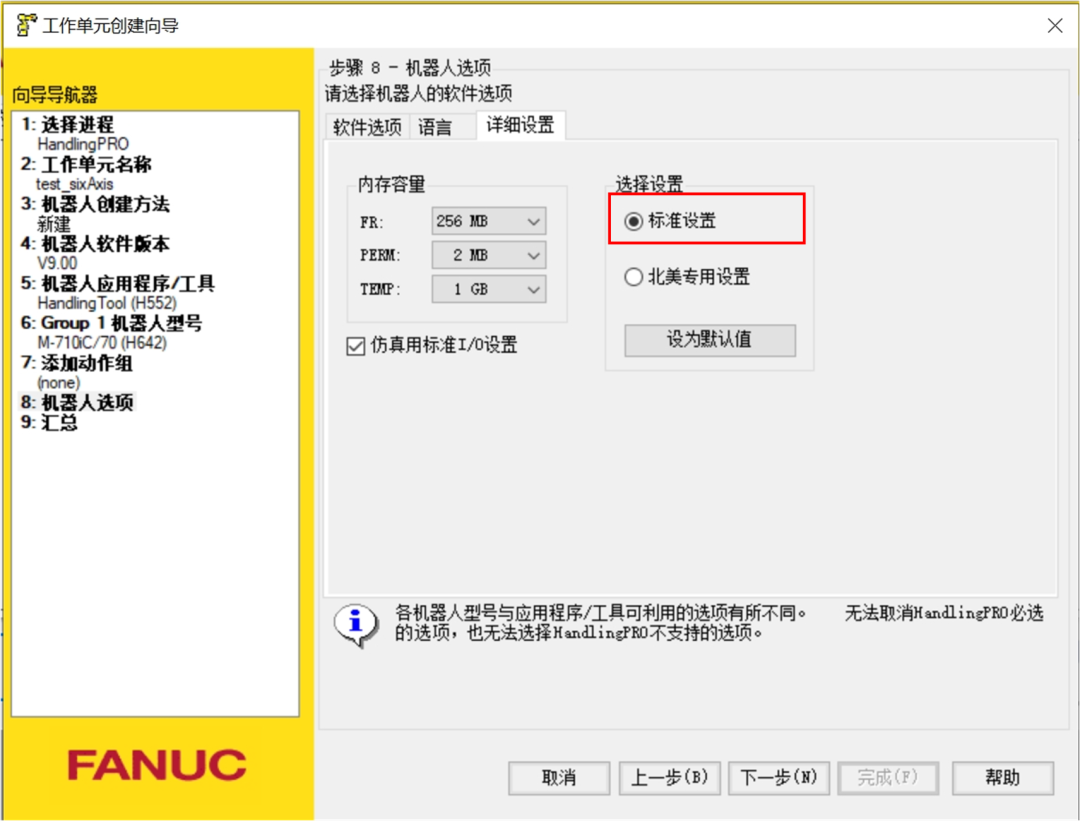
2.8 进行机器人选项:软件选项、语言、详细设置,点击下一步;
添加各种应用类型内的软件功能,将它们用于仿真,添加较多的功能应用是搬运中的附加轴控制、码垛、点焊中的伺服枪设置、弧焊中的协同等。
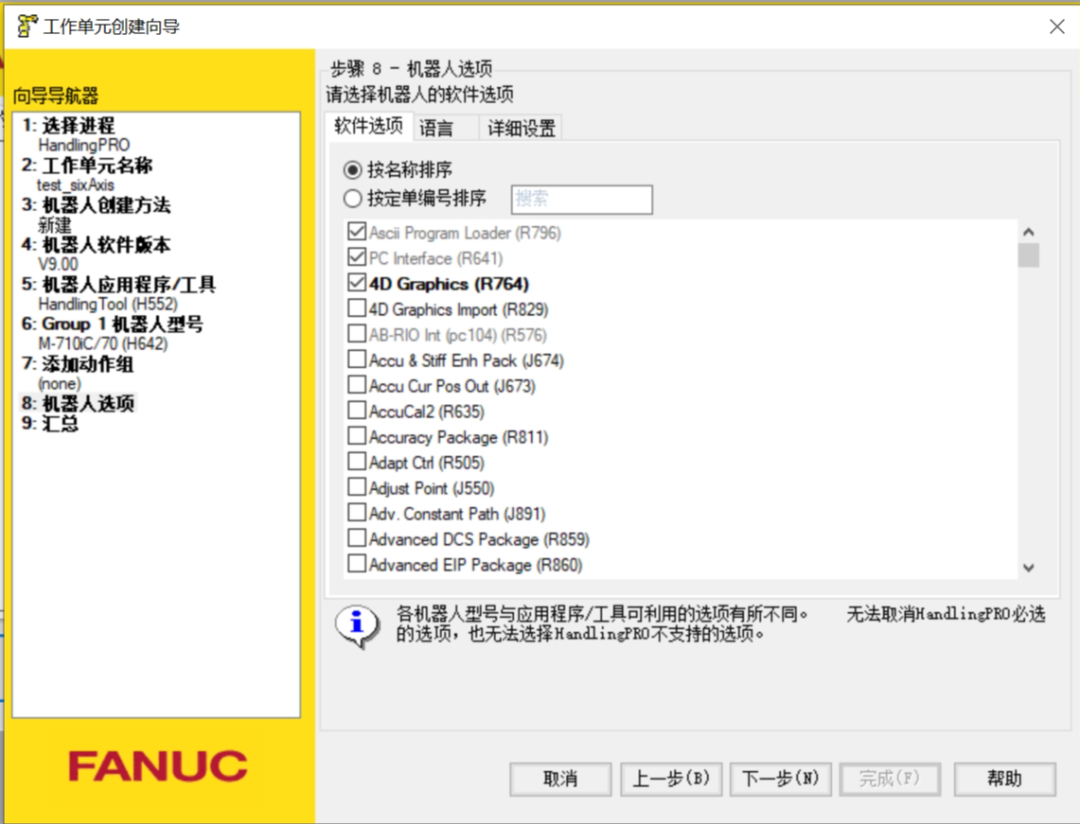
软件选项–4D Graphics(R764)
语言–加选词典(简体中文)
详细设置–标准设置
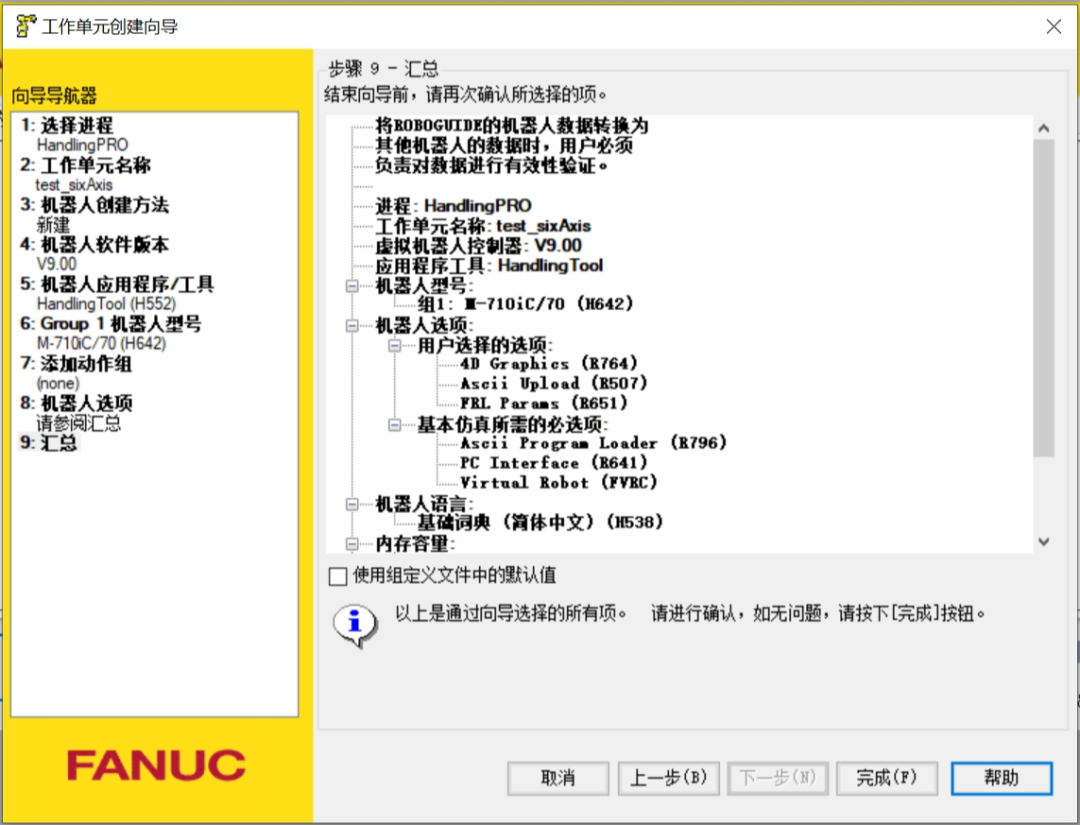
2.9 汇总,显示当前设置和选择的所有参数,点击完成;
03 等待软件生成,完成创建
等待软件生成
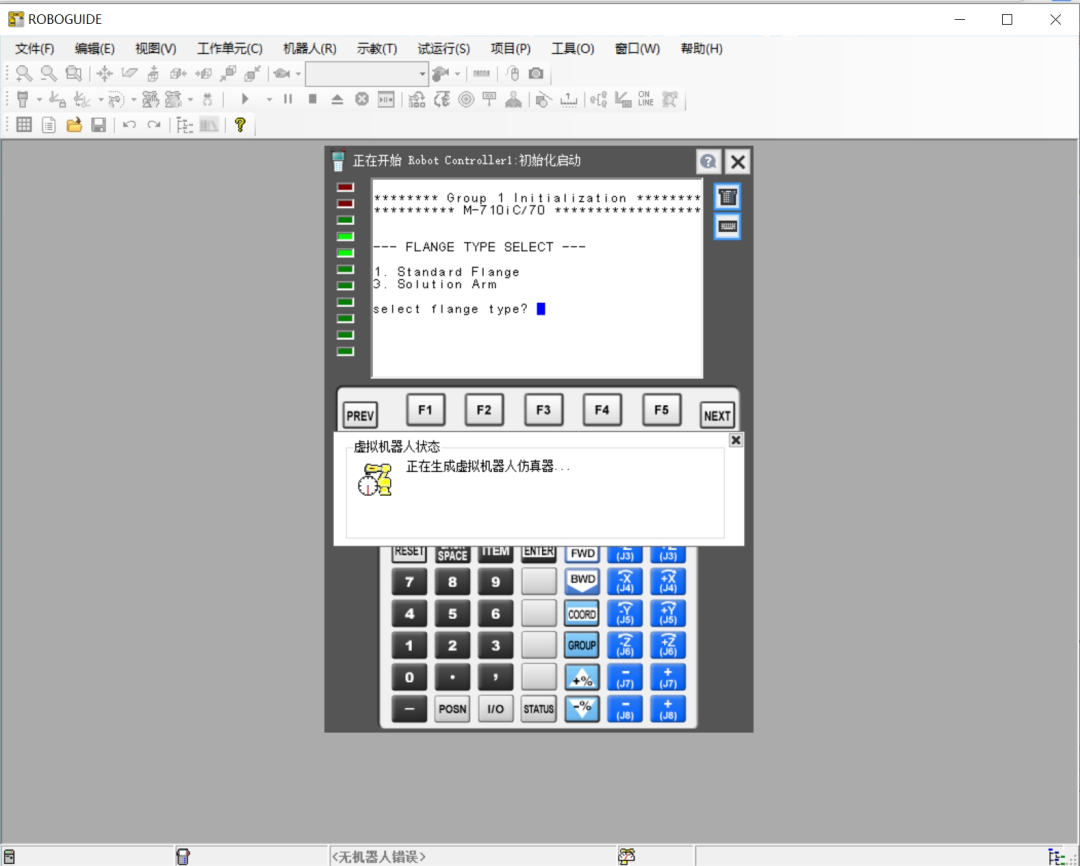
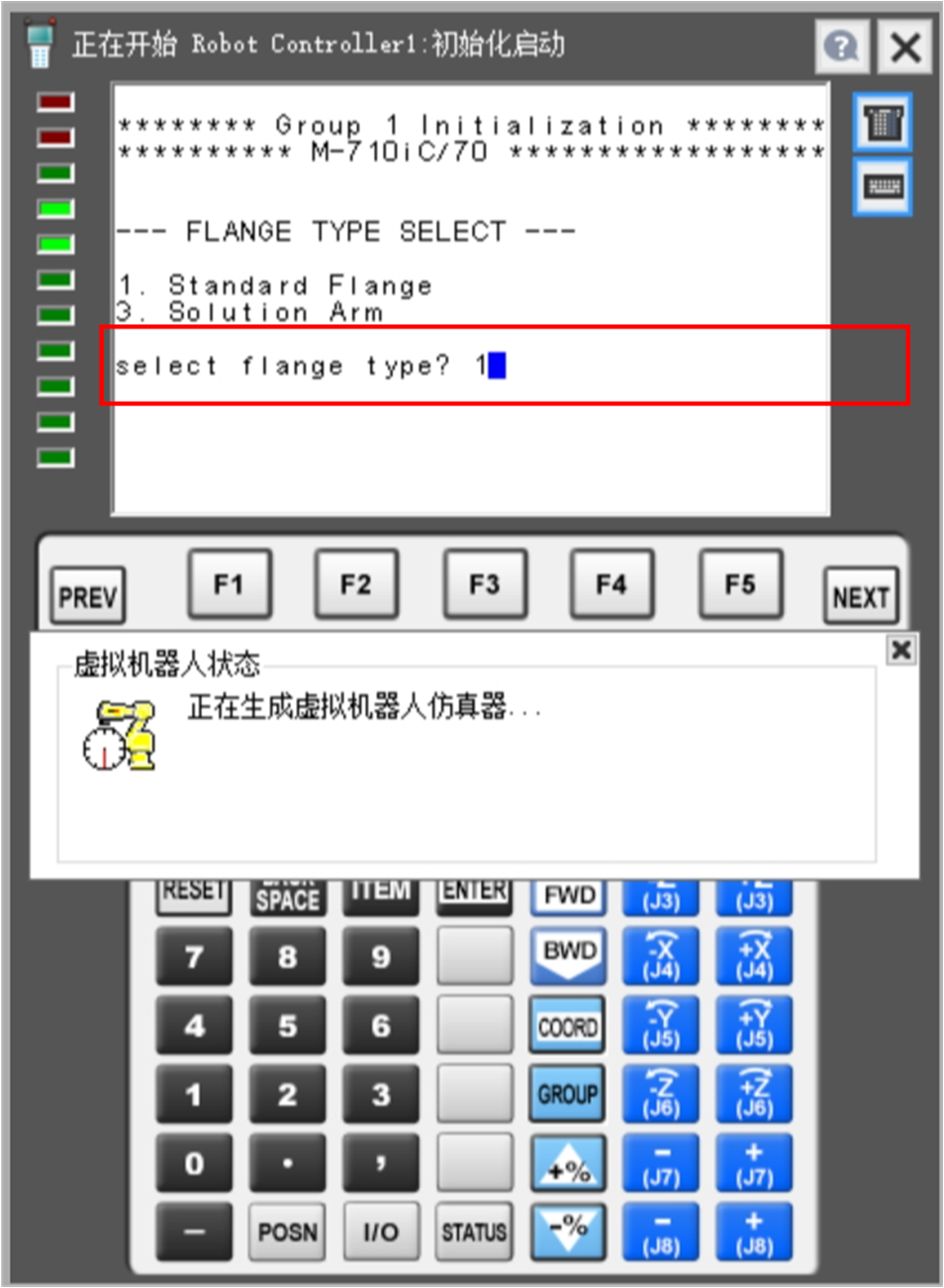
输入选项1,然后点击键盘回车,等待初始化;
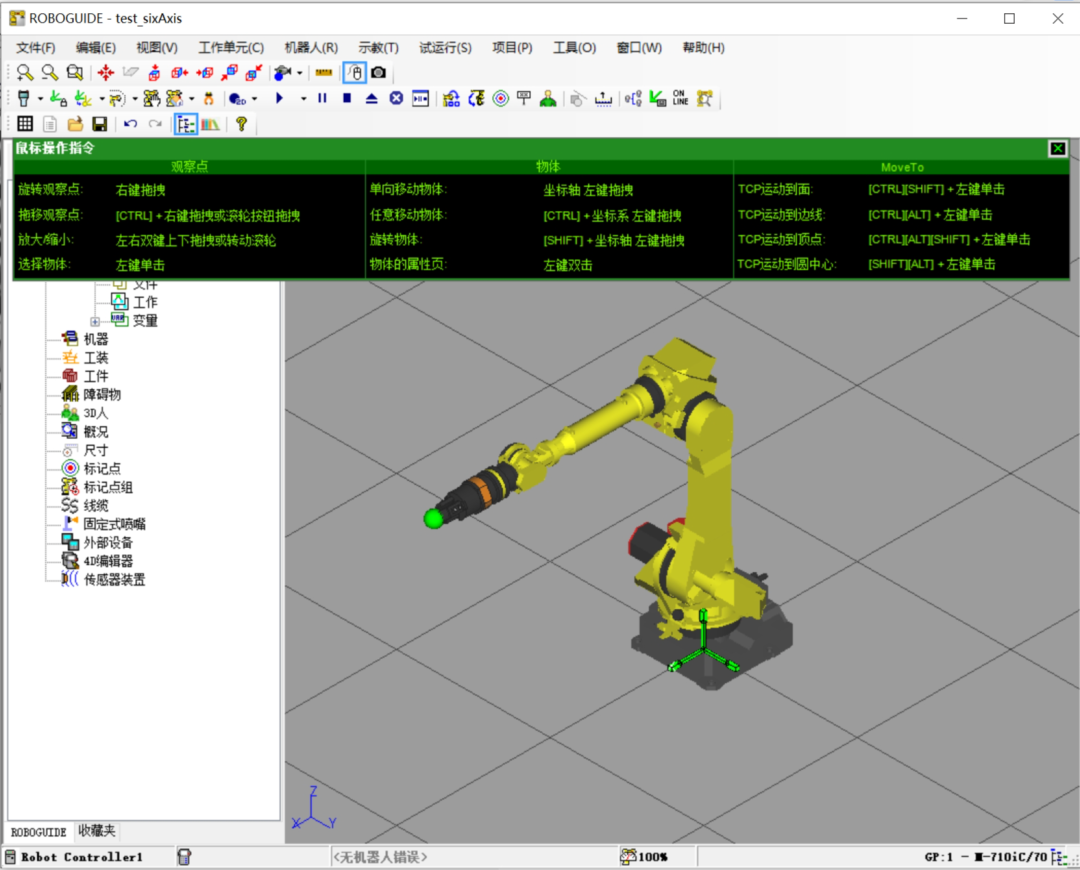
完成创建
-
发那科机器人搬运程序实例2016-01-05 0
-
发那科机器人伺服电机维修2020-08-14 0
-
发那科2000iB机器人焊接时出现焊点整体偏移故障维修2020-09-07 0
-
青岛发那科机器人SERVO-062伺服报警故障维修2020-10-12 0
-
求购发那科机器人配件;发那科伺服驱动器/全套系统模块高价上门回收2020-10-29 0
-
发那科机器人系统回收 发那科机器人配件常年高价回收2021-07-19 0
-
回收发那科放大器,回收发那科机器人,回收发那科CPU2021-07-27 0
-
最新版发那科机器人培训入门2015-12-23 1069
-
发那科新基地落户重庆,重庆究竟为何能吸引那么多的机器人厂商?2018-10-19 4397
-
发那科码垛机器人伺服电机的常见故障及处理方法2018-12-15 5768
-
发那科、ABB、安川、库卡—4大机器人品牌大对比!2019-04-01 18526
-
发那科机器人的资料合集免费下载2019-12-09 2987
-
发那科机器人截至到2019年已在全球累计安装超过了60万台2020-03-19 1724
-
发那科机器人示教手册DeviceNet配置流程详细说明2020-05-26 2905
-
上海发那科机器人智能工厂三期项目在上海开工2020-12-25 2785
全部0条评论

快来发表一下你的评论吧 !
