

华为与奇瑞合作的77G毫米波雷达内部拆解曝光
电子说
描述
实际早在90年代初,美国就开始在校车和长途巴士上安装24 GHz频段的毫米波雷达系统。它们能够提供诸如前向碰撞报警FCW和防撞制动CA等被动或主动的安全功能,且事实上对降低追尾事故和减少伤亡表现出显著的效果。而后,欧美各大车厂开始研发通过毫米波雷达实现基于安全和舒适驾驶目的ACC(Adaptive Cruise Control)自适应巡航功能。从1995年开始西方主要车企业陆续在其高端轿车上安装ACC系统。1999年梅赛德斯率先在其S级轿车上安装了77 GHz ACC雷达。接下来其他车厂相继跟进,如宝马7系、捷豹、奥迪A8和大众的辉腾等系列也安装了用以实现ACC功能的77 GHz毫米波雷达。至此汽车的ADAS时代正式拉开序幕。
机缘巧合得到了一个车用角毫米波雷达,今天拆解给大家看。
外观
整个外壳是塑料的,三个角上有植入螺丝固定孔。看着很结实,毕竟汽车级的电子产品,想想也实属正常。

模组背面有详细的零部件编号、厂家代码、软硬件版本号等等。看起来是华为给奇瑞开发的。
拆解
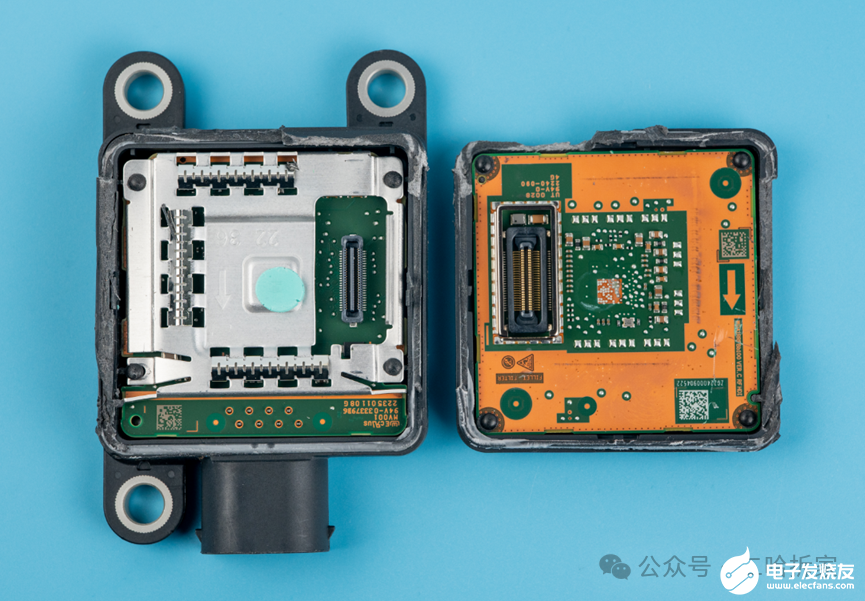
研究了半天发现只能用锤子砸开。在锤子快报废的时候,终于砸开了,可以看到底壳和顶壳里面各有一个板子,两个板子通过BTB连接器连接。我现在就想问一下搞结构的大佬们,这种黑色的外壳是什么材质?感觉强度快赶上不锈钢了。
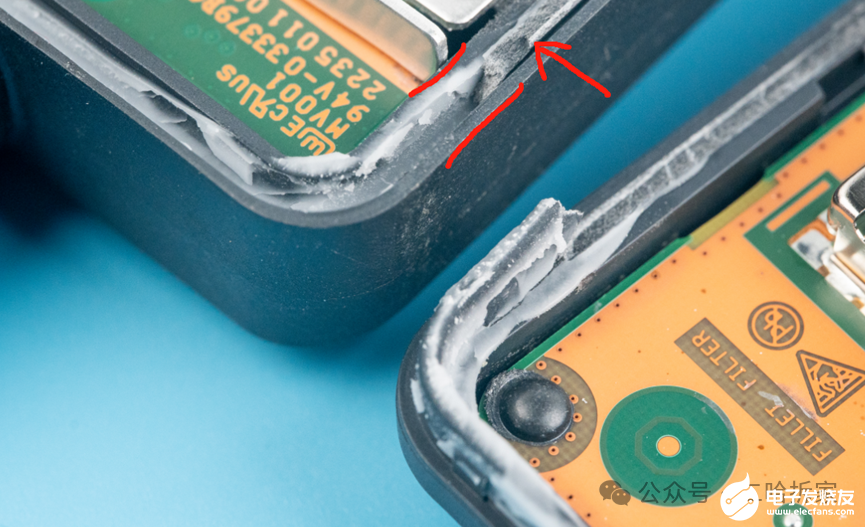
它这个外壳固定没有用螺丝。而是在底壳的墙体顶部中间开槽。然后把顶壳插进槽里,然后加了很多胶来固定的。
主控与电源板
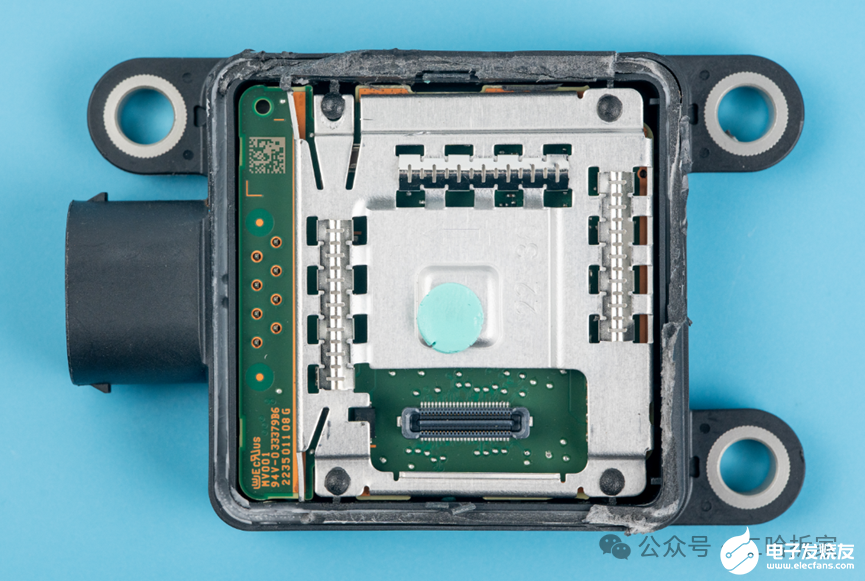
先看底壳部分,板子上面有一个铝合金屏蔽盖。
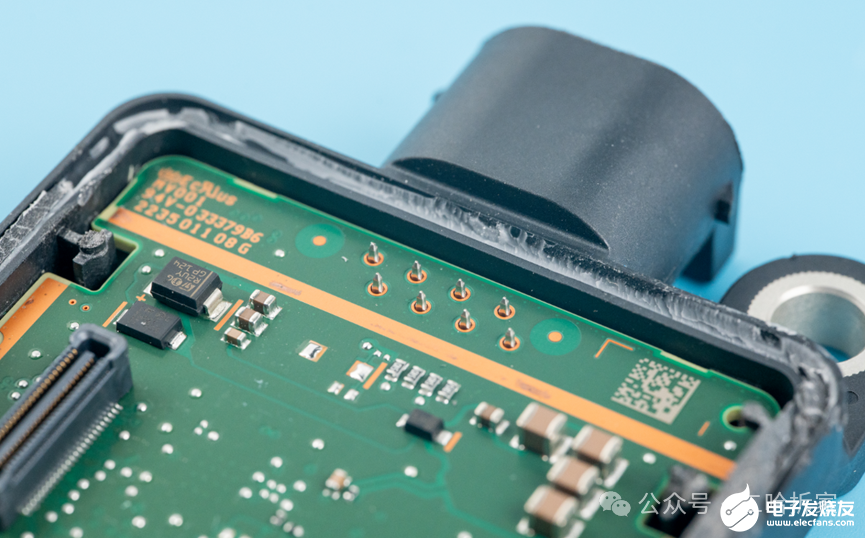
这个板子和线束连接器采用了压接的形式。

压接段子细节,一般服务器背板会采用这种压接工艺。
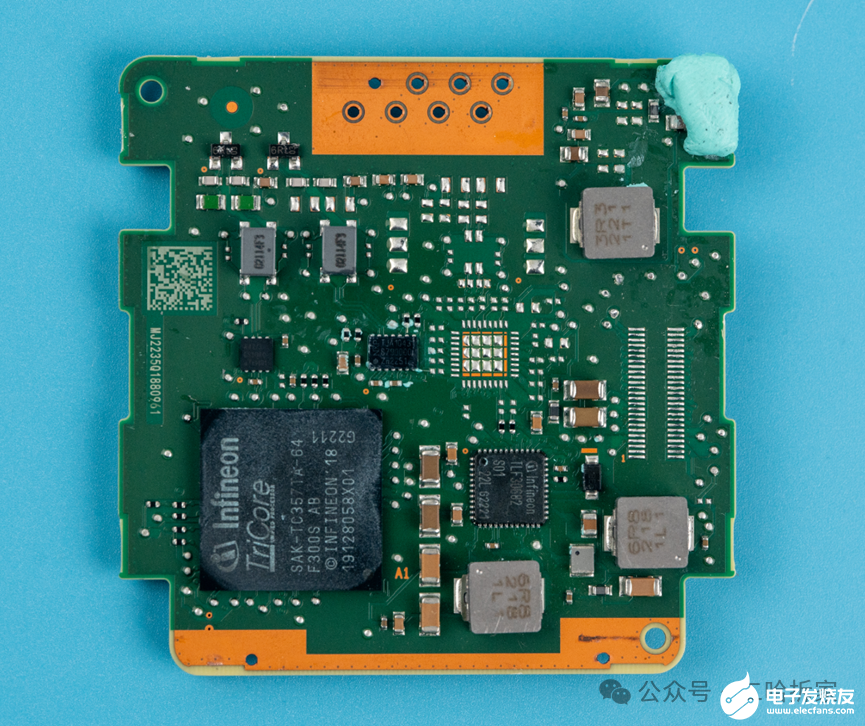
板子正面。

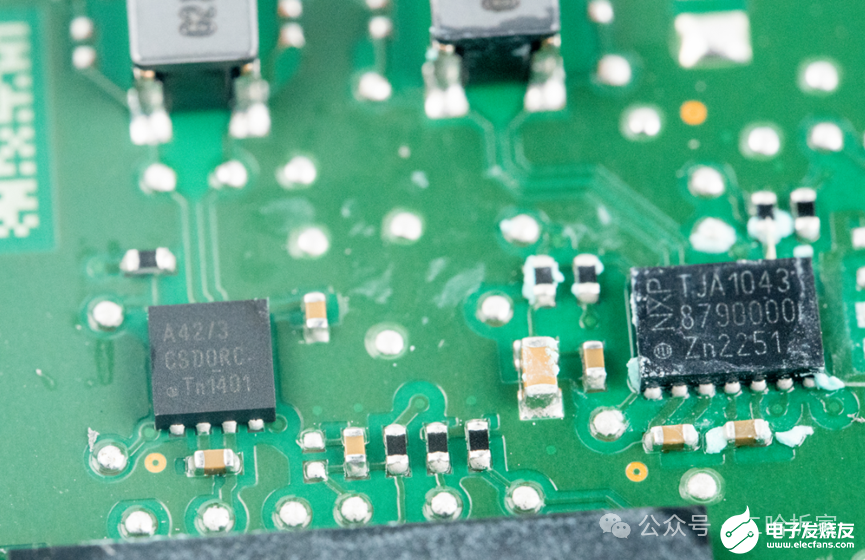
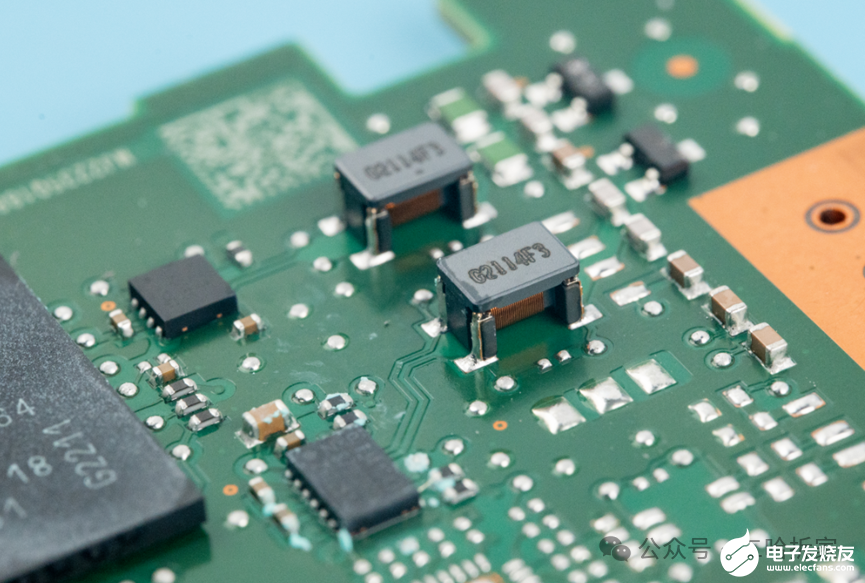
CAN Transiver到连接器之间的CAN_H和CAN_L信号上串有共模电感。
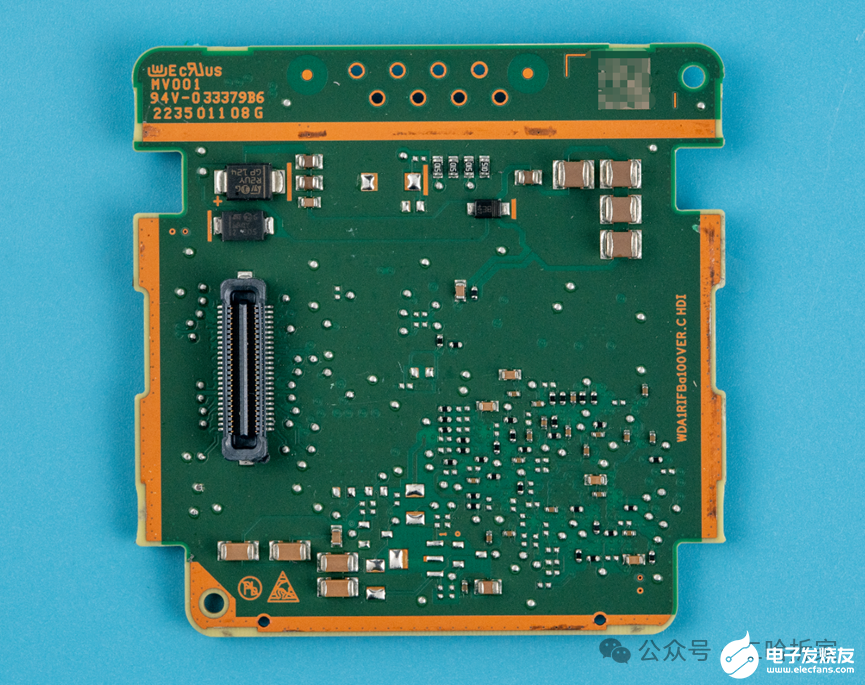
这个板子背面没有其他IC,只有一些阻容二极管及BTB连接器。
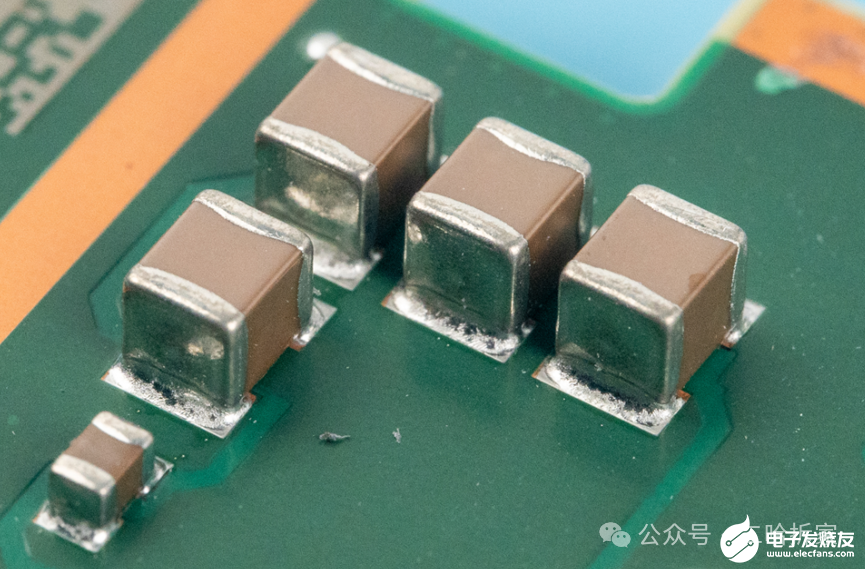
几颗胖乎乎的1210封装的MLCC电容特写。
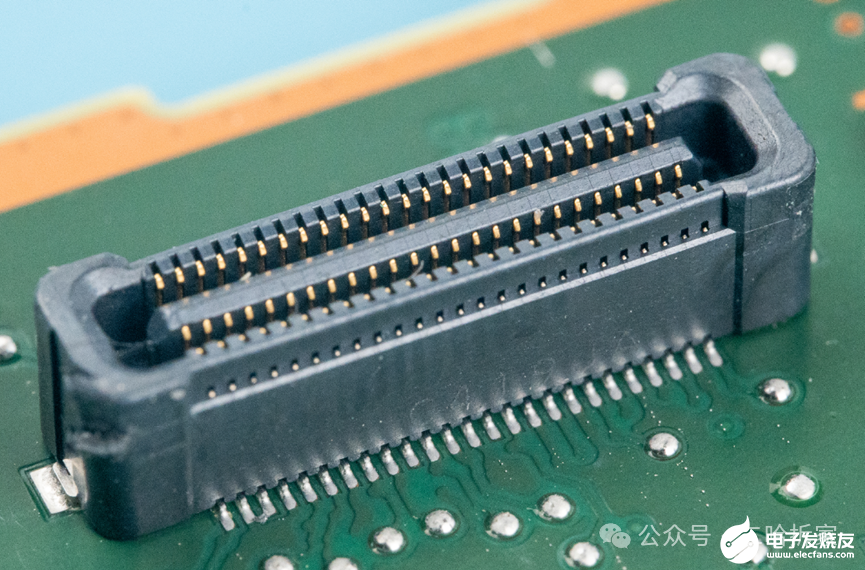
BTB连接器特写。
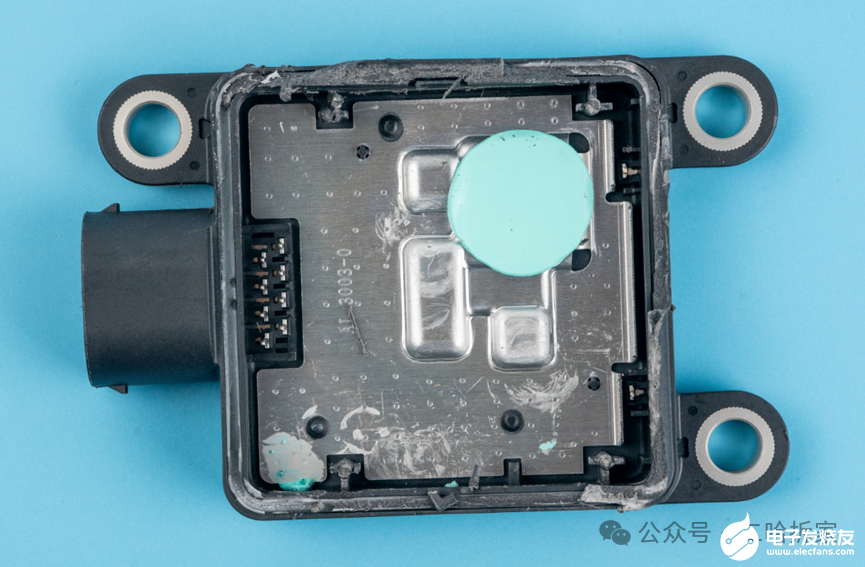
去掉板子之后,底下还有一个铝合金屏蔽壳。
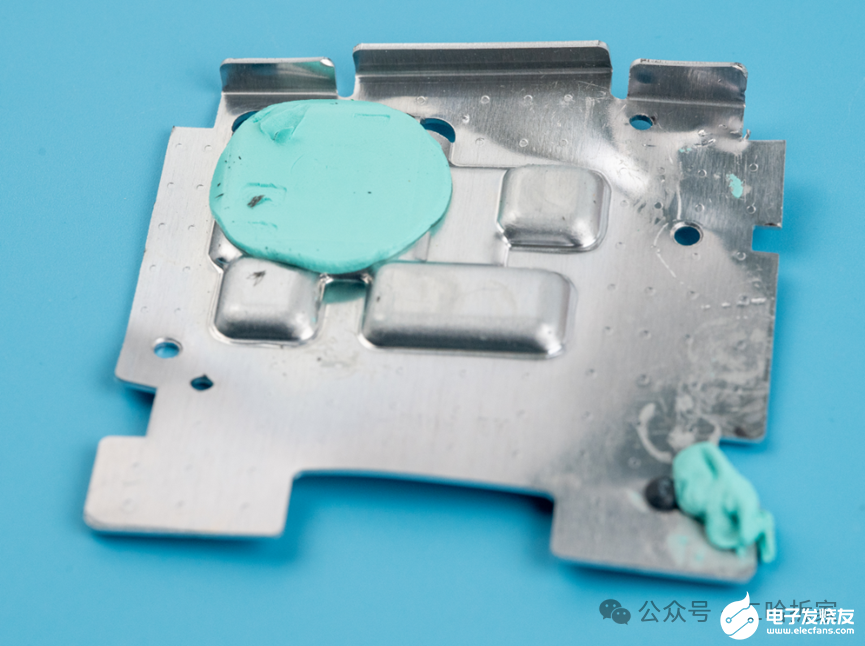
屏蔽壳上芯片的位置有散热硅脂。
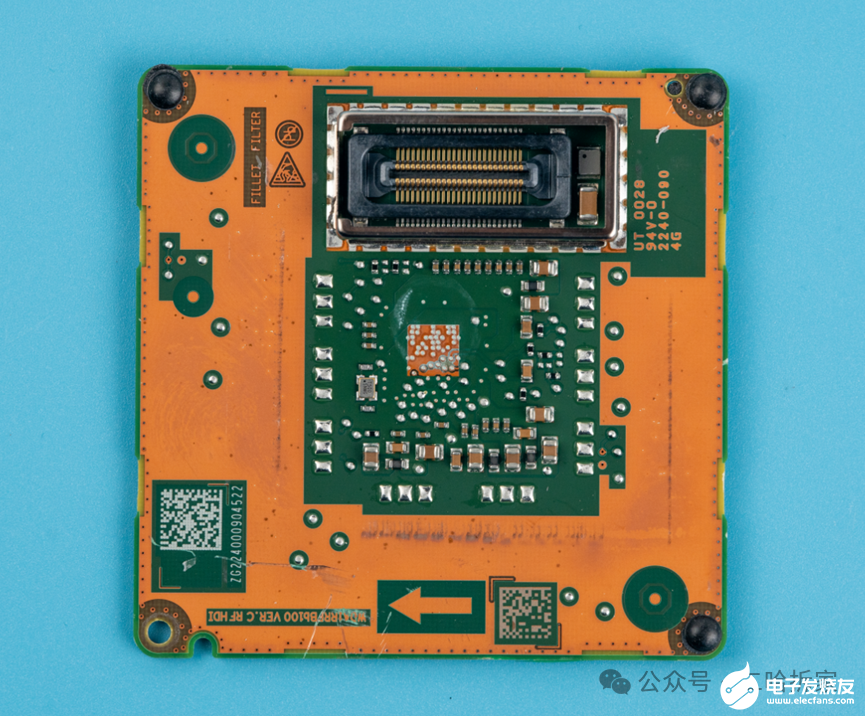
雷达天线板
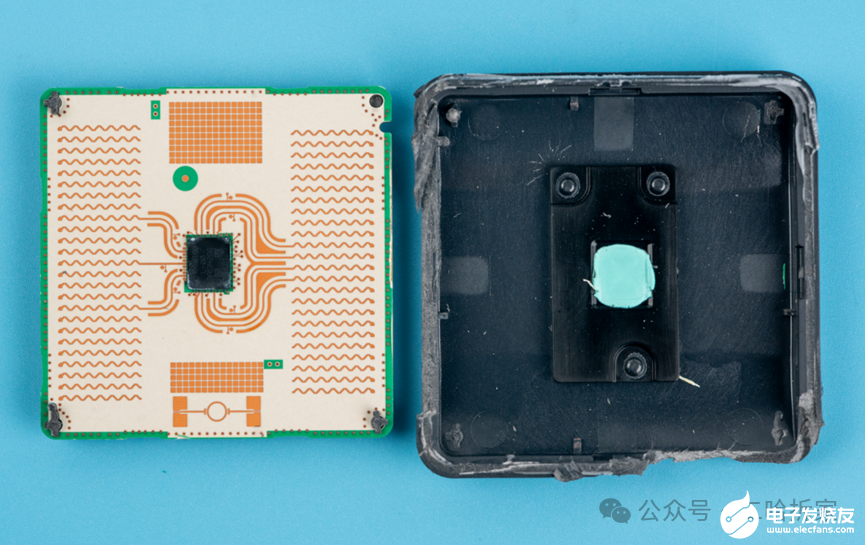
把顶壳里的板子拆下来。
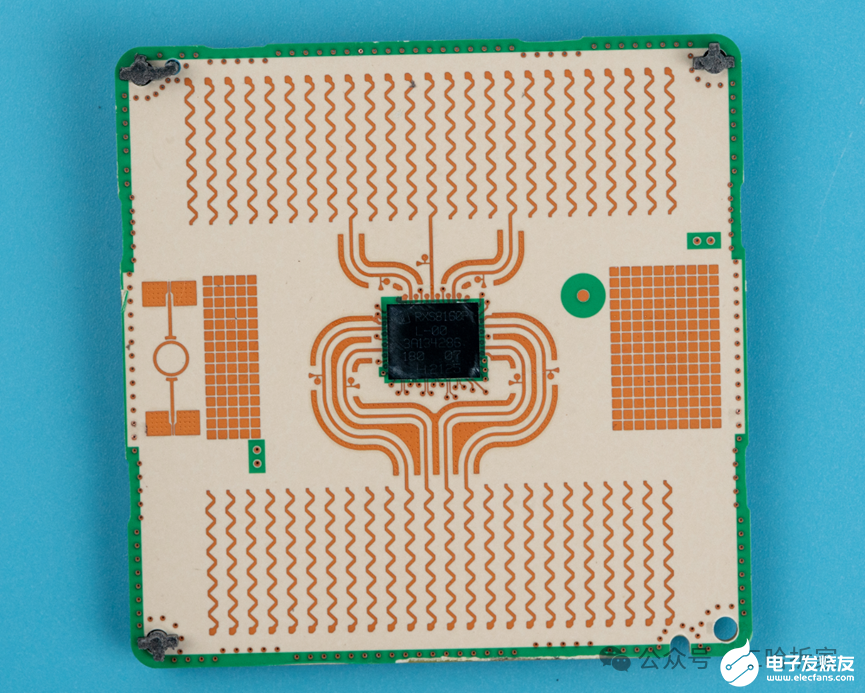
板子背面就是角毫米波雷达天线阵列,中间是一颗IC。
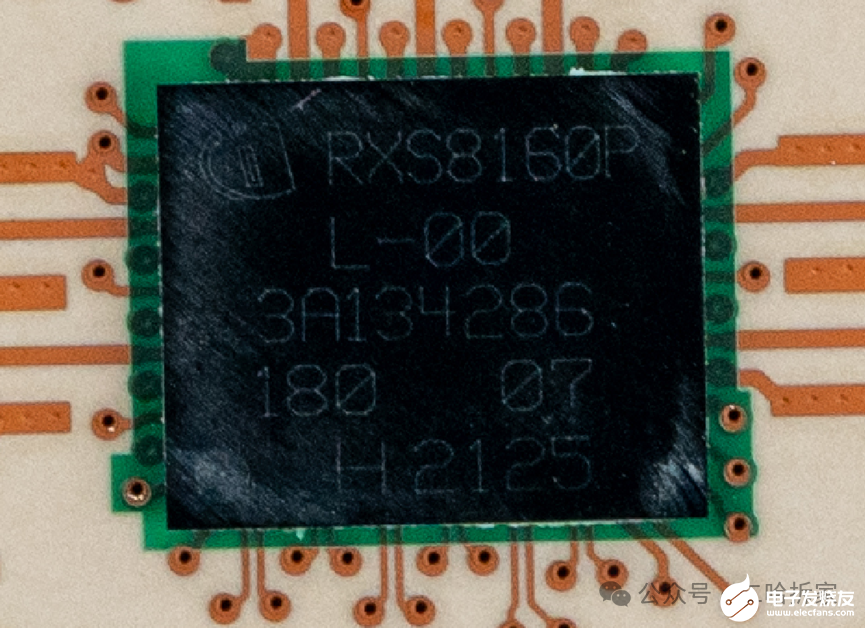
中间的IC是英飞凌的RXS8160P,这是一颗专用于汽车ADAS的雷达传感器射频前端。
以上是英飞凌手册《Infineon-Passive_Filter_Optimization_Application_Note-ApplicationNotes-v01_00-EN.pdf》中RXS8160P的应用框图。
板子正面是一个BTB连接器,中间一堆阻容晶振是RXS8160P的外围器件。

这个连接器是一个浮动连接器。当两个板子有相对位移的时候,连接器会跟着浮动。
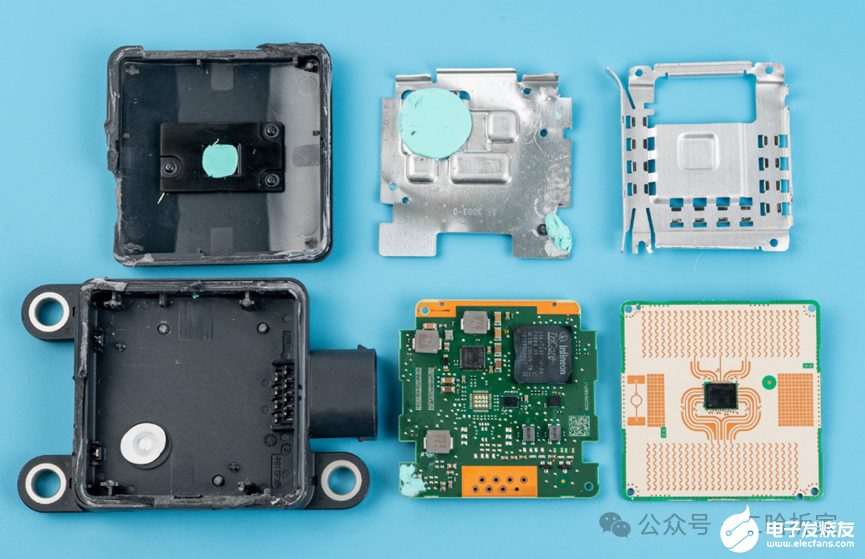
以上是整个角毫米波雷达的全家福。
毫米波雷达的应用非常广泛,无人机、汽车、机器人等产品中都可以广泛的见到雷达的应用。汽车上的毫米波雷达主要包括前向雷达、角雷达、门雷达等等,用于实现ACCL1L2等自动驾驶中的目标感知及避障。
77G毫米波雷达方案
1 典型ADAS/AD驾驶雷达方案
为了更好的了解最新毫米波雷达的硬件方案,我们先关注一下前沿的ADAS/自动驾驶感知系统的硬件拓扑结构。
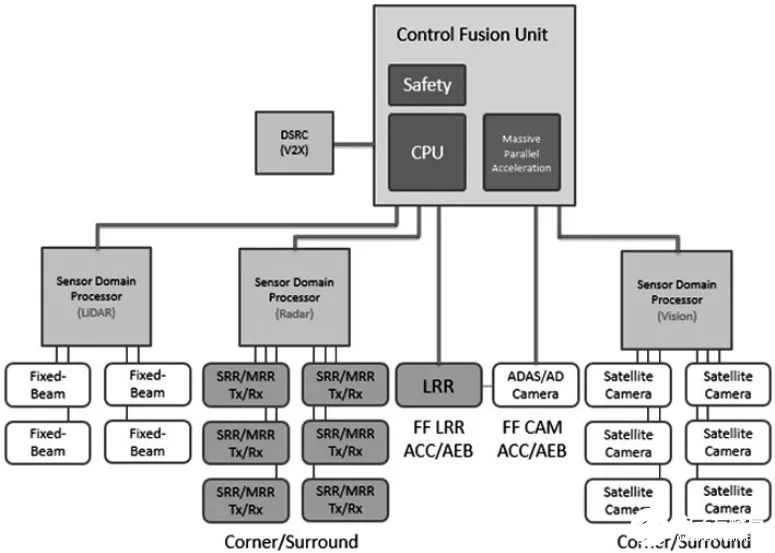
图7 ADAS/自动驾驶空间传感器系统
如图7展示,首先明确的将固态激光雷达、毫米波雷达和摄像头传感器分成独立的3个域,每个域有一个单独的域控制器(Sensor Domain Processor)。而一个域控制器下挂多个同类的传感器或雷达。比如,毫米波雷达域就有2组共6具雷达收发器。要说明的是最新的车载毫米波雷达支持级联技术,它通过将多个收发器串联在一起,增加某一方向上收发天线数量,通过域控制器的同步使这个方向的雷达具有更大的视场角度和探测能力。如图7中,6个SRR/MRR中短毫米波雷达就是3个一组的级联方式,2组分别负责不同的探测方向。同时LRR远距毫米波雷达被独立出来,因为前看雷达采用宽带高分辨率窄波束模式,专门负责ACC和AEB等高安全级别功能。其数据接口要满足大带宽和低延时要求,因此直接链接融合控制器,而不经由域控制器的分支。
当然,这种以控制融合单元(Control Fusion Unite)为中心的拓扑结构,可以拓展多个域控制器,结构非常灵活。不同类型的雷达或传感器获取的空间数据在这个单元中进行融合计算,最终建立起一个三维空间地图,实现如安全预警、变道、环视和自动泊车等ADAS功能。
2 77/79G雷达系统方案
如1.4节所展示的,一个完整车载毫米波雷达收发器模块,包括射频前端(含天线)、数字前端、数字处理DSP以及电源这4个部分。毫米波雷达作为整车前装部件,且单车装备数量多,所以整车厂对其成本非常敏感。早期的毫米波雷达方案,由于受到射频半导体工艺的限制,其威廉希尔官方网站 主要由分离器件搭建,性能和质量并不稳定,成本也下不来。但随着MMIC微波芯片技术和制造工艺的提高,不同的半导体公司都提出各自特点的集成方案。
表5 欧美主要雷达芯片厂最新方案
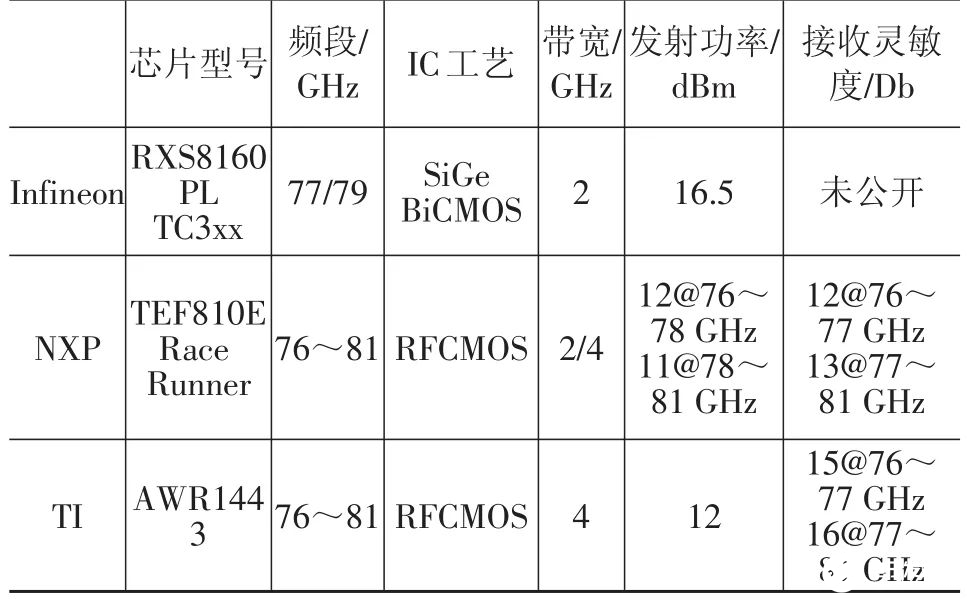
如欧洲的英飞凌(Infineon)其车载雷达方案发展的较早,他们最早采用离散器件威廉希尔官方网站 ,后逐步集成形成今天基于BiCMOS工艺收发器+数字DSP的套片方案。欧洲的另外一个厂商恩智浦(NXP)2017年开始从BiCMOS转向集成度更高的RFCMOS收发器+数字DSP的方案。而大洋彼岸的美国德州仪器(TI)则从一开始就采用RFCOMS技术制造集成数字处理后端的单芯片方案。这里可以看出从工艺角度有BiCMOS vs RFCMOS两大流派;从结构上有“套片方案”vs“单芯片方案”2种方案。下面就从成本和优缺点来分析这3种典型毫米波雷达IC方案。
2.1 BiCMOS vs RFCMOS
BiCMOS主要为SiGe(硅锗)工艺,BiCOMS是当前MMIC领域一种比较成熟的模拟制程。它是将双极型BJT晶体管和0.5 μm的CMOS技术结合在一起,让芯片既拥有硅工艺一定的集成度、较高的优良品率和较低的成本,又具备第3到第5类半导体在高截止频率、高功率、高线性度、低噪声等优良射频性能。BiCMOS非常适合制造毫米波雷达射频收发器IC。而采用RFCMOS工艺的优势是可以将射频前端,运算处理与存储器等数字组件制作在一块晶片上。这就意味着可以将雷达系统的模拟前端、数字前端和数字处理这3部分完全集成在一颗芯片里,实现雷达的单芯片化和低成本目标。
2.2 英飞凌RXS8160PL方案
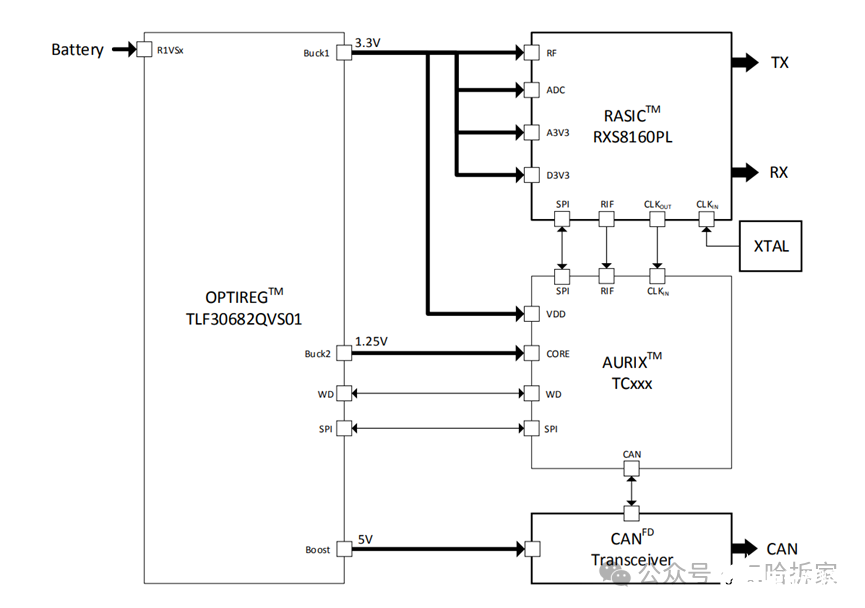
Infineon英飞凌方案采用3发4收天线阵列和BiCMOS制程(图8)。
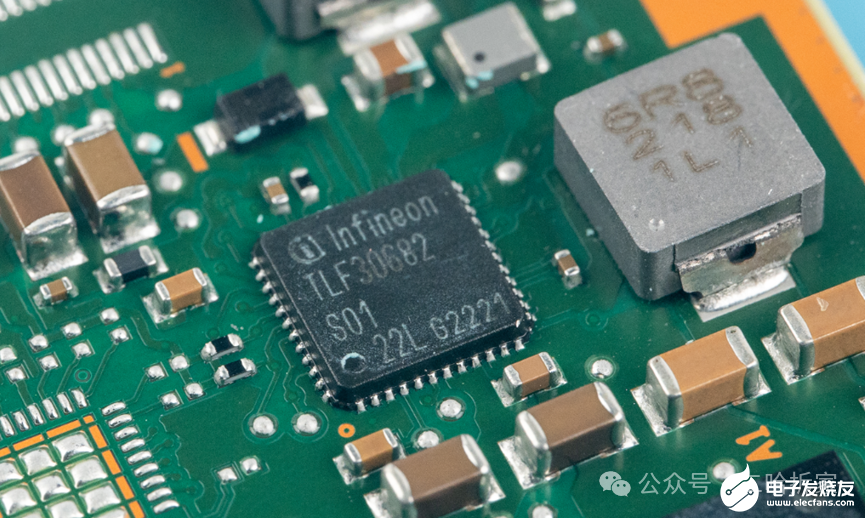
当前,英飞凌最新的77G车载雷达方案包括收发器前端(RF FE)RXS8160PL、第二代AURIX多核内嵌DSP的专用MCU以及TLF30684电源管理芯片PMIC的套片方案。
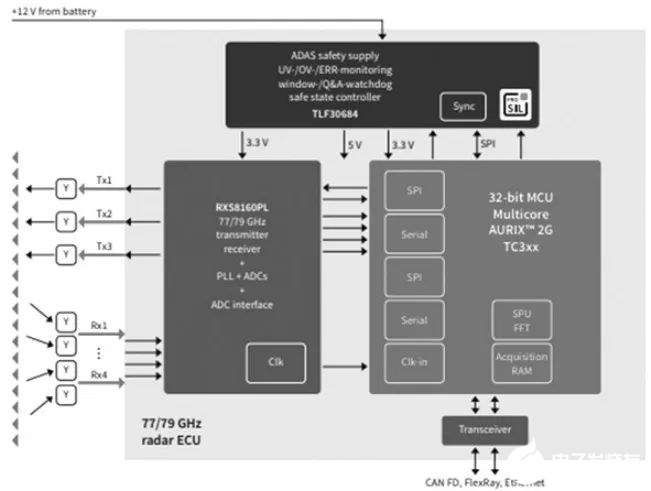
图8 英飞凌Infineon RXS8160PL+TC3xx套片方案
因为收发器中的中频威廉希尔官方网站 对电源数字噪声就非常敏感,如果不能很好的隔离,在FFT后会出现虚假目标。为了保证目标识别的稳定,采用一颗PMIC芯片将整车的12 V转换为多路相互独立的电源输出,有效保证模拟电源对数字噪声的隔离。
2.3 恩智浦TEF810E方案
NXP的Dolphin 77/81G车载雷达方案也采用3发4收的天线阵列和Infineon相同模拟数字分离的套片方案。但是NXP的收发前端采用的是RFCOMS工艺。之前文章提到过RFCMOS的优势在于数模混合集成,可以将DSP集成和模拟前端集成在一起。但是NXP依然采用模数分离的套片方案,除了上节提到灵敏度和假目标的原因,还有是从功耗和方面的考虑。BiCMOS的晶体管威廉希尔官方网站 需要偏执电压保证静态工作点和放大威廉希尔官方网站 的线性度,所以前端电压不能做到很低。而RFCMOS的前端威廉希尔官方网站 中VCO、LNA、PA、混频器和分频器的电源电压可以做到1.1 V左右,这样最极大限度的降低收发器威廉希尔官方网站 的功耗。如图9,TEF810供电可低至1.1 V,而SiGe的BiCMOS最低只能做到2.5 V(Infineon方案为3.3 V)。从2017年开始NXP的TEF810x采用RFCMOS方案,替换BiCMOS的MR2001分离套片方案。其中一个目的就是降低系统功耗,使其更适合车载能耗需求,特别是在电力消耗更为苛刻的新能源汽车上。
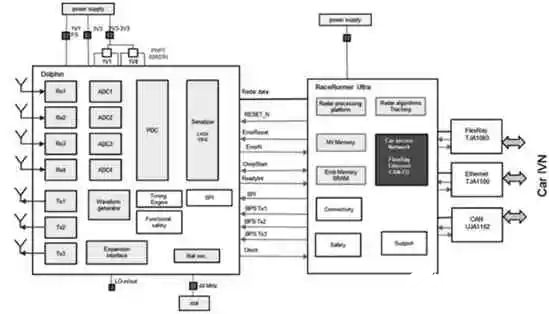
图9 NXP恩智浦TEF810E+RaceRunner套片方案
(注:MR2001方案是NXP 2016年对出的76~77G车载雷达方案,其射频前端有发射器Tx,接收器Rx和压控震荡器VOC三个独立的IC组成的套片方案)
2.4 德州仪器AWR1443单芯片方案
德州仪器作为专注数模混合器件的美国半导体公司,其进入车载毫米波雷达领域时间较晚。但是多年在RFCMOS上的积累,让它一开始就着眼于低成本低功耗的单芯片方案上。TI的AWR1443(图10)将内部威廉希尔官方网站 分为RF/Analog系统、数字前端和Master主控器子系统3部分,这是对应毫米波雷达的模拟前端、数字前端和数字处理3个模块。AWR1443得益于RFCMOS技术才把数模混合威廉希尔官方网站 、DSP、CPU和各种内存以及接口威廉希尔官方网站 集成在一起。
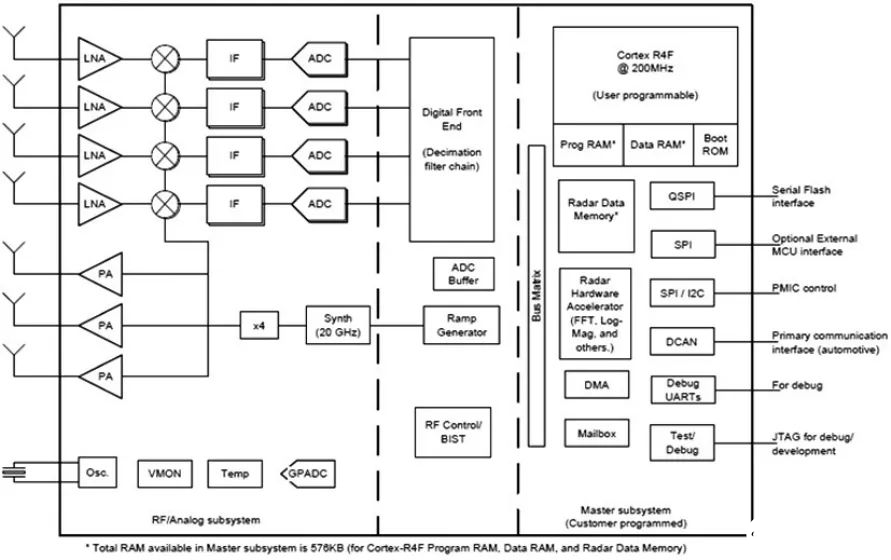
图10 德州仪器TI AWR1443单芯片77G雷达方案
出处:二哈拆解,百花潭编辑整理
审核编辑 黄宇
-
毫米波雷达方案对比2018-08-04 0
-
车载毫米波雷达的技术原理与发展2019-05-10 0
-
77G汽车毫米波雷达发展需要克服哪些难点?2019-09-12 0
-
毫米波雷达(一)2019-12-16 0
-
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能2020-06-03 0
-
毫米波雷达77GHZ 79HGZ PBT透波材料 汽车ACC,无人机 ,道砸 防砸系统2020-11-27 0
-
求一种基于NXP的77G毫米波雷达之先进辅助驾驶解决方案2021-07-30 0
-
大联大控股推基于TI 车载辅助驾驶77G毫米波雷达解决方案2018-08-22 6669
-
世平推出基于TI产品的先进驾驶辅助系统之77G毫米波雷达解决方案2018-09-01 6053
-
关于汽车ADAS前装77G毫米波雷达解决方案2019-01-24 13568
-
大联大世平发布77G毫米波雷达盲区侦测BSD解决方案2019-07-11 5363
-
大联大世平推出基于TI的77G毫米波感测模块解决方案2019-08-16 1790
-
简析毫米波雷达的原理及其产业链2020-10-30 2338
-
77G车载毫米波雷达如何实现防水处理2021-04-13 2629
-
FMCW毫米波雷达的基本原理2023-09-15 3880
全部0条评论

快来发表一下你的评论吧 !
