

惯性测量单元传感器在自主移动机器人的应用
描述
利用IMU增强机器人
定位与实现精确导航
惯性测量单元(IMU)传感器可实现机器人的定位与导航,已成为机器人精确定位的重要组成部分。IMU集成了加速度计、陀螺仪和磁力计,通过提供实时响应,使机器人能够准确地确定其方向、位置和运动,从而使机器人能够在动态变化的环境中导航。本文将为您介绍IMU的功能特性,与在自主移动机器人(AMR)的应用,以及ADI所提供的相关解决方案。
IMU帮助在AMR运行环境中实现精确定位
IMU可提供关键的运动数据,已成为机器人精确定位的重要组成部分。传感器融合技术可将IMU数据与其他传感器(例如摄像头或LIDAR)相结合,通过整合多个数据源来提高定位精度。IMU广泛应用于移动机器人、人形机器人、无人机(UAV),以及虚拟/增强现实。它们在实现精确定位方面发挥了重要作用,使机器人能够自主执行复杂任务并与周围环境有效互动。
AMR对于未来的智能工厂和仓储至关重要,在塑造未来自动化、可持续和清洁的工厂方面发挥着关键作用。AMR可提高效率、减少浪费并优化工业环境中的利用率。虽然未来可能会专门为AMR建造和优化工厂环境,但让这些机器人适应现有的仓库和工厂仍面临诸多挑战。AMR面临的主要障碍涉及两个关键部分,包括如何高效路径规划(确定最佳路径)和精确定位(不断更新其在环境中的位置)。
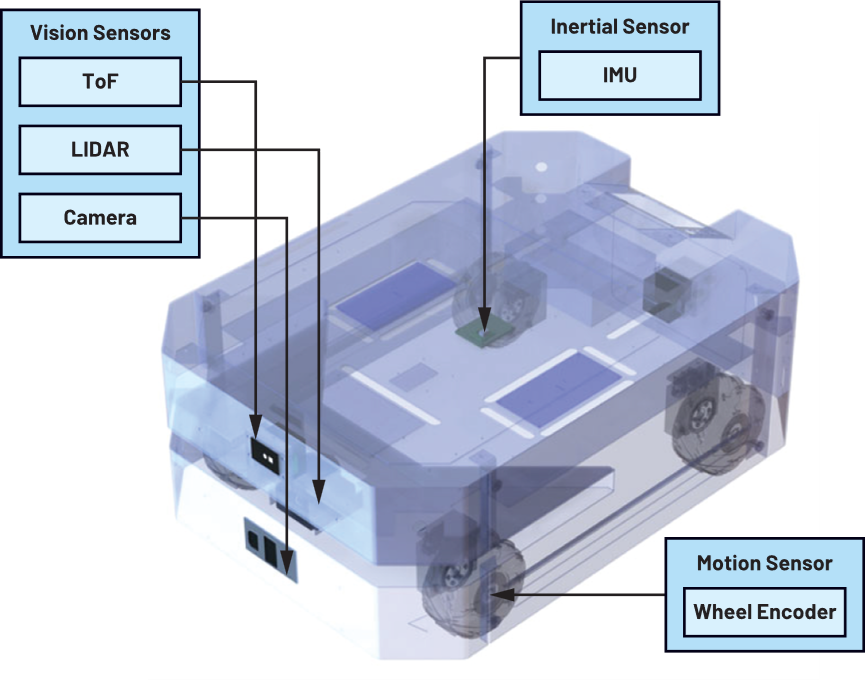
由于GPS无法在覆盖的封闭环境下进行室内导航,因此AMR需要利用一系列传感器和算法进行定位和导航。其中包括摄像头、LIDAR和雷达等视觉传感器,以及车轮编码器和IMU等测程传感器。每种传感器模式在范围、准确性和传感信息方面都各有优势。这些传感器的组合可确保提供全面的数据,从而在动态环境中有效定位机器人。
高性能IMU提升AMR的定位与导航能力
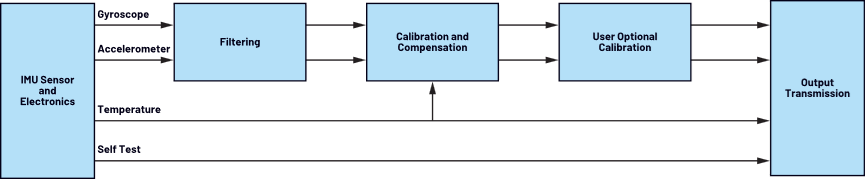
IMU是由微机电系统(MEMS)器件构成的微型器件。其中通常包括三轴加速度计、三轴陀螺仪、高性能磁力计等。三轴加速度计用于测量相对于地球重力场的加速度。三轴陀螺仪用于测量旋转速率,提供三个轴上每个轴的角速度。高性能磁力计可提供磁场测量,对于在具有挑战性的环境中准确估计方向至关重要。此外,还有其它种IMU,如温度传感器用于补偿温度变化,气压计用于测量压力。
IMU的高刷新速率的实时定位,是自主性和实时导航是机器人操作环境中的关键要素。然而,感知传感器的刷新速率通常受到限制,大概在10 Hz到30 Hz的范围内。相比之下,IMU拥有提供高保真位置输出的能力,最高可达200 Hz。更高的刷新速率,显着提高了系统在动态环境中,快速适应方向快速变化时的可靠性,从而有助于快速响应。凭借加速的刷新速率,AMR还能够在其他测量之间的短暂间隔内提供估计姿态。因此,IMU在实现实时定位方面发挥着关键作用,其刷新速率比感知传感器快10倍。
另一方面,IMU是航位推算的支柱,航位推算是一种根据先前已知的位置估计当前位置的导航技术。IMU可随着时间推移不断提供位置、方向和速度数据,从而实现精确估计,有助于AMR实现可靠导航。
此外,IMU具有紧凑的尺寸和轻便的设计,非常适合集成到各种移动机器人配置中。IMU并需要具备在不同环境中的可靠性,具有一定的抗电磁干扰能力,可以在多种环境中运行,包括室外和室内环境。因此,它们适合广泛的应用。
IMU还可以通过加快刷新速率提高可靠性,感知传感器的刷新速率通常限制在约10 Hz至30 Hz之间,而IMU可提供高达4 kHz原始数据的高保真位置输出,具有显着的优势。更高的刷新速率增强了可靠性,特别是在动态环境中,使AMR能够快速响应,并有助于在其他测量之间的短期间隔内估计姿态。
在已经有视觉传感器的情况下,IMU对AMR来说仍然必不可少,这是因为AMR通常具有多种视觉传感器,例如飞行时间(ToF)、摄像头、LIDAR等。尽管视觉测程提供了丰富的数据集,但IMU仍有存在的必要性。
例如,AMR可在特征稀疏的走廊中导航,同步定位与地图绘制(SLAM)算法本质上通过匹配观察到的传感器数据来工作,这些数据存储在地图中以便在地图内进行定位。IMU还可实现在广阔的开放环境中导航,当在大型开放空间(如50 m×50 m的大型仓库)中工作时,因为各个独特特征超出了传感器范围(LIDAR的最大范围通常约为10 m到15 m),AMR的测程功能无法发挥作用。
当在斜坡上行驶时,传统的SLAM算法依靠LIDAR时会遇到挑战,因为2D点数据不显示坡度信息。IMU可通过提取坡度信息来帮助解决这一难题,从而有效地在斜坡上导航。利用IMU导航时,需要具备对环境因素的敏感性,LIDAR传感器对各种环境因素很敏感,例如环境光、灰尘、雾和雨。这些因素会降低传感器数据的质量,进而影响SLAM算法的性能。IMU可以在各种环境中可靠运行,因而成为移动机器人在发挥多功能性时的合适选择。
传感器融合可提高IMU的可靠性与数据质量
然而,世界上并没有十全十美的传感器,尽管IMU有其优势,但也存在风险并会带来一些挑战,像是IMU测量容易受到噪声的影响,这会降低机器人导航和控制的准确性。为了补偿噪声,IMU通常采用先进的滤波技术,例如卡尔曼滤波或FIR。
另一方面,IMU传感器会随着时间的推移积累偏置,这会导致方向和运动估计出现误差。为了解决这个问题,采用了偏置估计算法来不断更新IMU传感器读数。此外,IMU传感器会表现出非线性行为,这会进一步加剧数据处理和解释的复杂性。为了对非线性度进行补偿,需要对其进行校准以表征传感器的行为并应用适当的校正。
随机游走现象也是需要考虑的议题,IMU易受到外部热机械事件的影响,导致ARW(角度随机游走(陀螺仪中))和VRW(速度随机游走(加速度计中))出现误差。该如何降低这些风险呢?传感器融合将是重要的技术!
传感器融合可提高可靠性、提高数据质量,以及更好地估计未测量的状态,并增加覆盖范围从而确保安全。传感器融合需要靠算法来支持,扩展卡尔曼滤波等状态估计技术可以纠正常规AMR运行期间的噪声、ARW和偏置不稳定性误差,并通过测量地球引力加速度,可以消除IMU中的俯仰和滚转陀螺仪误差,该算法会跟踪和纠正偏置漂移,并纠正ARW误差。
扩展卡尔曼滤波器(EKF)则可用在即使建模系统的确切性质未知,也支持对过去、现在和未来状态的估计。随着时间的推移,观察到的测量值包含高斯白噪声或其他不准确性,并通过同步传感器之间的测量、预测姿态和误差估计、估计和更新预测值的不确定性,利用这些方式来估计测量的真实值。
高精密度的微型微机电系统惯性测量单元
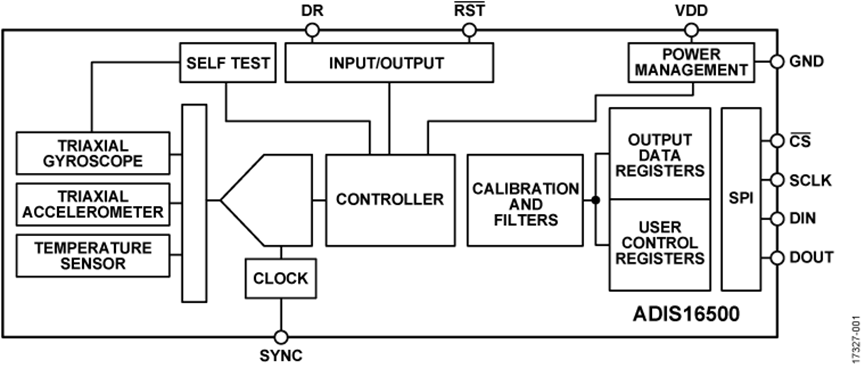
由ADI推出的ADIS16500是一款精密的微型微机电系统惯性测量单元,它包括一个三轴陀螺仪和一个三轴加速度计。ADIS16500中的每个惯性传感器均结合了可优化动态性能的信号调节功能。工厂校准可表现每个传感器的灵敏度、偏置、对准、线性加速(陀螺仪偏置)和冲击点(加速度计位置)。因此,每个传感器都有动态补偿公式,用于在各种条件下提供准确的传感器测量。
ADIS16500提供了一种简化且经济高效的方法,用于将精确的多轴惯性检测技术集成到工业系统中,尤其是在与离散设计所涉及的复杂性和投资进行比较时。所有必要的运动检测和校准均已在工厂生产过程中完成,大大缩短了系统集成时间。在导航系统中,紧密的正交对准简化了惯性坐标系对准。串行外设接口(SPI)和寄存器结构设有一个简单接口,用于数据收集和配置控制。
ADIS16500内置的三轴数字陀螺仪具有±2000°/sec的动态范围,运行偏置稳定性为8.1°/小时,x轴和y轴角度随机游走为0.29°/√小时,1 σ,轴间错位误差为±0.25°;内置三轴数字加速计的动态范围为±392 m/s2,运行偏置稳定性为125 μm/s2,支持三轴、角度增量和速度增量输出,出厂前经过工厂校准灵敏度、偏置和轴向对准,校准温度范围为−10℃至+75℃。
ADIS16500支持SPI兼容数据通信,以及可编程操作和控制、自动和手动偏置校正控制,还有用于同步数据采集的数据就绪指示器,支持直接、缩放和输出的外部同步模式,以及惯性传感器按需自检、闪存按需自检,采用3.0 V至3.6 V单电源供电(VDD),具有19,600 m/sec2机械冲击生存能力,可在−25℃至+85℃的温度范围工作,ADIS16500采用100球的球栅阵列(BGA)封装,尺寸约为15 mm × 15 mm × 5 mm。ADIS16500可应用于导航、稳定和仪器仪表、无人和自动驾驶车辆、智能农业和建筑机械、工厂/工业自动化、机器人、虚拟/增强现实、运动物联网(IoMT)等。
结语
IMU是AMR定位的必备元器件,因为IMU可以提供方向估计和运动跟踪,并以高刷新速率提供实时响应,使得AMR能够在动态环境中行驶。借助卡尔曼滤波器等传感器融合技术,可以组合其他传感器模块来弥补彼此的局限性。ADI提供丰富多样的IMU,将可满足各种移动机器人应用的特定要求。
-
基于超声波传感器的自主移动机器人的探测系统2012-01-19 0
-
移动机器人常用传感器2012-08-20 0
-
转: 基于LPC2119的自主式移动机器人设计2016-07-28 0
-
Labview My RIO 移动机器人2016-08-21 0
-
基于超声波传感器的自主移动机器人探测系统2018-11-02 0
-
超声波传感器在机器人避障中有什么作用2019-02-27 0
-
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统2019-07-11 0
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 0
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 0
-
如何实现移动机器人的设计?2020-11-23 0
-
什么是移动机器人软硬件系统问题2021-08-06 0
-
移动机器人的三种主要运动系统2021-09-01 0
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 0
-
使用Arduino和LM393传感器测量移动机器人2022-12-15 806
全部0条评论

快来发表一下你的评论吧 !
