

液晶空间光调制器的同步移相共光路干涉技术
光电显示
描述
1、引言
与采用分离光路干涉的泰曼-格林、马赫-曾德等干涉仪相比,共光路干涉仪的物光和参考光在同一光路中传播,能够较好抑制外界振动、温度起伏等噪声影响,具有一定抗干扰能力,因而在光学表面、形变、厚度及折射率等检测领域更具吸引力。经典的共光路干涉仪结构有相衬法斐索干涉法和剪切干涉法等。相衬法利用滤波器对物光的零频分量和高频分量分别施加不同的相移实现干涉测量,方法结构简单,且干涉图样与输入相位直接对应,恢复算法也简单,但依赖于对零频分量的分离,且滤波器的选择对测量结果影响较大;斐索干涉法利用一个标准平面产生参考光,但对平面表面质量和均匀性要求高;剪切干涉仪通过在两束物光之间引入剪切量实现干涉测量,不仅剪切量调控困难,而且因为获得干涉条纹仅是剪切波前的相位差,需要复杂的算法实现相位恢复。近年,Arrizón等提出一种基于4f系统和光栅滤波的共光路干涉法,将输入平面分成两个窗口,一个用作物光,另一个用作参考光,通过合理选择光栅周期、透镜焦距和窗口尺寸等参数,以及轴向或横向移动光栅或引入偏振片组获得不同相移的干涉图,进而实现测量,方法原理简单、抗干扰能力强,但测量精度仍受限于光栅相移或偏振片质量。为了解决这些问题,本课题组提出了三窗口共光路干涉仪,将输入平面分成3个窗口,其中心窗口用作物光,其余两窗口用作参考光,利用光栅自身的相移特性,通过一次曝光采样可在输出平面上获得3个不同相移的干涉图样,不仅增强系统的稳定性和抗干扰能力,而且大大提高系统的操作性和实时性。本文在上述工作基础上,提出利用液晶空间光调制器(LC-SLM)的灰度数字调制能力,在LC-SLM上加载光栅,通过灵活调整光栅参数以方便不同尺寸待测物体的相位测量,进而提高系统调整的方便性和测量的灵活性。
2、干涉原理
基于LC-SLM的三窗口同步移相共光路干涉仪的如图1所示。从He-Ne激光器发出的光经准直扩束透镜扩束后照射位于4f系统输入平面上的矩形光阑。矩形光阑包含3个窗口,被测透明物体置于中心窗口之前,则通过中心窗口的光为物光,通过两侧窗口的光为参考光。透镜L1和L2构成的4f系统频谱面上的滤波器由加载在LC-SLM上的光栅实现,并对输入光进行衍射分光,在输出面上形成多级衍射光。通过调整窗口大小、光栅周期等参数,可在输出平面获得3幅相移图。
假设准直扩束后的输入光为理想平面波,则系统输入平面的光场复振幅分布为
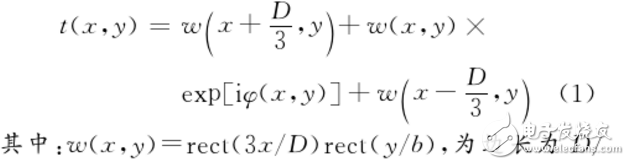
在系统频谱面上,加载在LC-SLM上的光栅起频域滤波的作用。相应的,其冲击响应函数可表示为
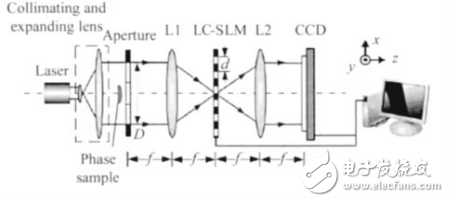
图1 三窗口共光路干涉仪示意图
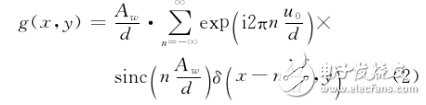
其中:Aw为光栅透光区宽度;d为光栅周期;u0为光栅透光区中心相对于系统光轴在x方向的偏移量;λ为光源波长;f为透镜焦距。于是,系统输出平面上的光场分布可以表示为
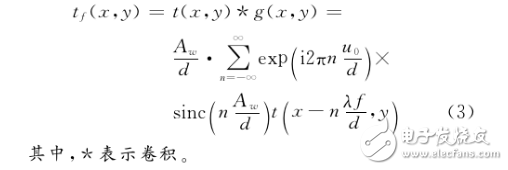
其中,*表示卷积。假设加载在LC-SLM的光栅为Aw/d=1/2的二值光栅,同时调整光栅周期d=3λf/D,并去掉干涉图样的公共因子,则在输出平面上获得的位于x=-D/3、0和D/3处的3个干涉图光强分布为

3、实验与分析
为了进一步认识所提干涉仪的性能,依据图1构建实验装置如图2所示。其中:光源为λ=632.8nm的普通He-Ne激光器;傅里叶变换透镜L1和L2为f=250mm的平凸透镜;透射式LC-SLM分辨率为1024×768,像素大小为18μm;CCD分辨率为1600×1200,像素大小为4.4μm;被测物为一柱面镜,放置在中心窗口前。利用LC-SLM的灰度调制能力,在其上加载d=72μm、占空比为1/2的二值光栅。经过透镜L1的聚焦光束经过LC-SLM进行空间滤波。当光栅的初始偏移u0=d/4时,cosθ=0,会使I0的条纹变化消失。因此,在调整光栅初始位置时,最好使u0<d/4。
该操作可通过改变LC-SLM上加载光栅完成,不仅调整方便,而且调整精度高。为避免高级次衍射光影响,调整输入孔径的宽度D=3λf/d=6.59mm,可在CCD上通过1次曝光采集3幅移相干涉图,如图3所示。提取3幅干涉图,并根据式(5)进行相位恢复,恢复结果如图4(a)所示。为了更好地评价该干涉仪的相位恢复效果,构建双窗口共光路干涉仪,并采用四步相移法恢复待测相位,恢复结果如图4(b)所示。从图可以看出,两次相位恢复结果相同,从而进一步证明本文所提干涉仪的正确性和可行性。
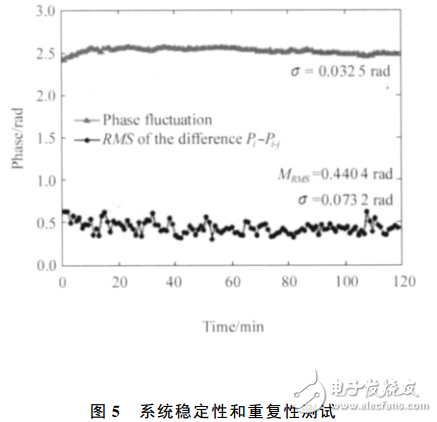
为了评价系统的稳定性和重复性,以1min为间隔进行了120次测量,并选取恢复结果中的任意一点,观察该点在120次测量中的变化,获得的结果如图5中三角点线所示。由图可见,该点相位变化的标准差σ=0.0325rad,表明所提干涉仪具有较好的稳定性。同时,计算相邻两次测量结果之差的均方根RMS,得到结果如图中圆点线所示,其中Pi表示第i次测量结果,其平均重复性MRMS=0.4404rad,标准差σ=0.0732rad,从而进一步表明所提干涉仪具有长时间稳定性和重复性。
从上述分析结果可以看出,本文所提干涉仪具有强的相位恢复能力,但其测量精度仍受限于诸多因素,如He-Ne激光器的功率波动和强相干噪声、透射式LC-SLM的输出波动和强“黑栅效应”、CCD以及4f系统的不理想等,而这些问题可通过采用高质量的器件解决。虽然本系统的精度还有待提高,但其本身的诸多优势,如结构简单、稳定性高、实时性好和灵活性好,是一种非常有前景的相位测量工具。
4、结论
提出了一种基于LC-SLM的三窗口共光路干涉仪,利用LC-SLM的灰度调制特性,通过在LC-SLM上加载光栅实现频域滤波,在保持系统稳定性、实时性的基础上,提高了系统操作的灵活性和测量的方便性。对比实验表明了所提方法的可行性,稳定性和重复性实验表明了所提方法具有长期的稳定性和重复性。由于本文系统具有结构简单、稳定性高,实时性好和灵活性好等的优势,并可通过降低噪声、改进算法等的处理达到较高的精度,从而有望应用于高精度相位实时测量场合。
-
全面分析空间光调制器的多种作用2021-04-14 0
-
空间光调制器,空间光调制器工作原理是什么?2010-03-20 14344
-
空间光调制器(SLM),空间光调制器(SLM)是什么意思2010-04-02 6570
-
空间光调制器怎么用_空间光调制器的功能及应用2018-01-16 10509
-
相位型LCoS空间光调制器与自适应光学2021-06-23 1031
-
液晶空间光调制器的应用场景2021-06-26 1264
-
反射式振幅型空间光调制器(F-SLM)的典型光路2021-07-15 1875
-
相位型LCOS空间光调制器介绍2021-08-10 2761
-
液晶空间光调制器的应用介绍2021-08-13 1507
-
空间光调制器与生物医学仪器的关系2022-12-20 885
-
RD系列Ⅲ空间光调制器用途有哪些?2022-12-14 424
-
液晶空间光调制器的原理和应用2023-05-29 5914
-
液晶空间光调制器原理及公式2023-12-19 2023
-
液晶空间光调制器器件及应用2023-12-20 816
-
空间光调制器的原理 空间光调制器的作用2023-12-20 2241
全部0条评论

快来发表一下你的评论吧 !
