

北斗导航关键技术及应用
GPS设备
描述
北斗导航关键技术及应用
实现基于北斗卫星导航系统的安全定位,需要保证卫星定位的精确度、连续性和完好性,能够持续获取准确的位置信息,保证运行安全: 能够监测并评估故障,提出告警。
针对上述关键问题,以下方法被提出并应用于辅助定位: 是组合定位技术,用于解决定位完整性、连续性的问题; 二是差分定位技术,主要用于辅助提高定位精度; 三是组合系统的完好性监测技术,实现定位系统自主完好性监测。
一、组合定位技术
组合定位是采用其他类型的数据源与BDS 系统的定位信息结合,辅助提高BDS 系统的定位精度与完整性、连续性,本文使用的技术手段包括多模卫星组合定位和多传感器信息融合组合定位。
1.1 多模卫星组合定位
由于目前BDS 系统还处于建设期,卫星数量还相对较少,广播星历的精度有待提高,而卫星覆盖率,可用卫星数量和空信号精度直接影响定位的效果。因此,采用GPS/GLONASS/Galileo 系统进-步补充和增强系统卫星信号资源,是解决BDS 系统定位不足并优化系统应用的重要途径。
多模卫星组合定位就是用- 一台卫星定位接收机同时接收和测量BDS 系统与其他卫星导航系统的卫星信号,从而能够综合利用多种卫星导航系统精确测出三维位置、三维速度、时间和姿态等相关参数。多模组合定位需要将多种定位功能组合在一一个单元内,由于BDS 系统与GPS这两种星基导航系统在系统构置、导航定位机理、工作频段、调制方式、信号和星历数据结构等方面基本相同或相近,都以发射扩频测距码、测量卫星与用户之间的伪距来完成导航定位,而且GPS 系统建设完善,定位精度高,所以本文使用BDS/GPS 双模冗余组合实现多模组合定位解决方案。
BDS/GPS 双模卫星导航接收机基于软件无线电思想设计问,由BDS/GPS F 变频单元、信号处理单元、PVT (位置、速度、时间) 解算单元、RTC (实时时钟)守时单元、对外接口单元和电源模块等组成。系统所用天线为有源接收天线,由BDS/GPS 天线板和低噪声放大器组成。下变频单元由GPS和北斗射频模块组成,将天线送来的信号下变频; 信号处理单元跟踪机载天线送来的GPS和BDS 卫星信号,以用户时钟为参考,提供各卫星信号到达时间,最后将解调数据、信号到达时间送至PVT解算单元: PVT解算单元实现定位坐标的解算、定位结果滤波、定位误差修I正等数据处理; RTC守时单元输出不间断的时间信息至PVT解算单元,完成时间基准的保持。接收机结构设计如图2 所示。
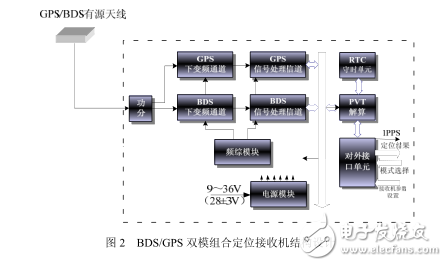
BDS 和GPS的导航卫星信号通过基带信号处理单元分别进行捕获、跟踪、观测量提取和导航电文提取操作,不同卫星的信号用各自专有的数字通道处理,并行工作。PVT解算单元接收基带信号处理单元输出的输出导航电文和码伪距、多普勒频率、载波相位测量和本地时间等观测量数据,进行自主导航运算,在伪码的跟踪状态下,计算得到用户到卫星的伪距p,解算获得用户的位置和卫星与用户的钟差。解算应F 月Kalman滤波算法,可以获得较高的噪声抑制能力,并且能够时给出用户的速度信息。
1.2 多传感器组合定位
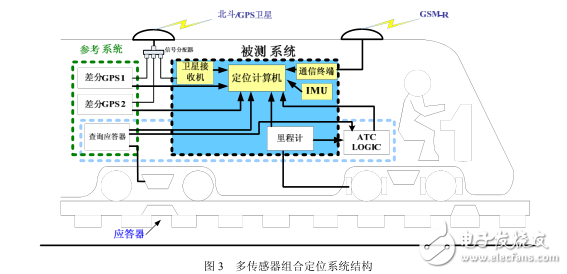
轨道交通的运行环境特殊,具有涉及地域广泛,环境复杂的特点,存在- 一些卫星信号遮挡的区域。为了得到连续可靠的定位信息,确保列车定位信息的安全,通常采用信息融合的方法,利用多传感器组合辅助保障定位17.81。
组合定位测量系统可以包括多种传感器,如里程计、卫星定位接收机、惯性传感器等。各种传感器都连接到车:载定位计算机,由车载定位计算机通过不同传感器提供的冗余位置测量信息(包括列车位置、速度、航向等),采用多传感器数据融合方法,综合利用多源信息获得列车位置量的最优或次优估计,高效的利用这些冗余信息完成定位结果的求解。系统结构如图3 所示。
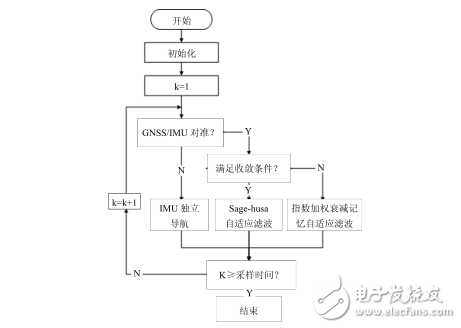
根据Sage-Husa 自适应滤波算法与衰减记忆滤波算法的特性,解决方案提出一种列车定位的自适应信息融合算法,充分发挥两种算法各自的优势,利用Sage-Husa 自适应滤波提高滤波精度,而当存在发散趋势时使用衰减记忆滤波抑制发散,从而降低了信息融合对先验噪声统计特性和模型选取的依赖,保证了信息融合的精度和稳定性。
改进的1自适应算法的基本思想是在BDS/IMU 数据对准、融合开始时,先对本次融合的滤波发散趋势进行判断,当满足收敛条件时,采用Sage-Husa 自适应滤波进行融合,而当滤波发散时,采用指数加权衰减记忆滤波保持融合的稳定。由于Sage-Husa 自适应算法能够有效提高滤波的精度,同时也具有一定的发散抑制能力,而衰减记忆滤波为了抑制发散需要以一定的精度为代价,因此只有当滤波发散超过Sage-Husa 算法的承受能力时,融合才改用衰减记忆滤波,最大程度的发挥了两种算法各自的优势。下图给出了改进的自适应融合算法的流程。
二、差分定位技术
差分定位可以消除或者削弱卫星导航定位中的接收机钟差、卫星钟差等多种误差,载波双差后模糊度为整数,所以GPS 系统中差分定位应用#非常广泛。
差分定位包括伪距差分定位技术和实时载波相位差分定位技术10。伪距差分定位比较每颗卫星每时刻到基准站的真实距离与伪距, 得出伪距改i正数,修iF 定位,能得到米级的定位精度。载波相位差分技术又称RTK (Real Time Kinematic) 技术,通过实时处理两个观测站载波相位观测量的差分,求差解算坐标,可使定位精度达到厘米级,大量应用于动态需要高精度位置的领域。
轨道交通领域实现差分定位一般采用基准站-移动站差分系统。在地面设立差分基准站,产^生卫星定位差分信息,并播发给车载设备,以提高列车定位的精确度。一般在列车运行控制方面采用伪距差分技术,在铁路地理信息测绘方采用RTK技术。
差分系统可分为两个基本部分:
(1) 地而基准站: 基准站同时采用两台GNSS 接收机,连续跟踪观测GNSS 卫星,产生RTCMV2.0/V2.1修正数。基准站天线坐标采月WGS84 坐标系,精度优于土0.5 m; 输出IS、5S、30S采样间隔的GNSS 原始观测数据。
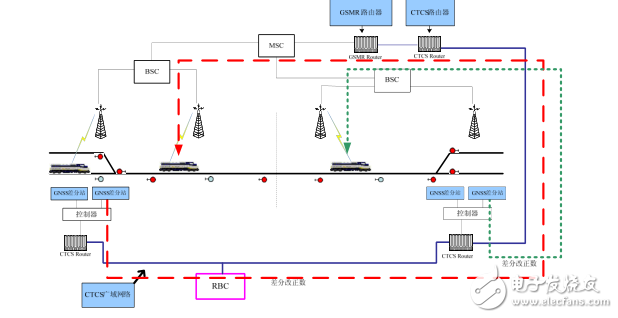
(2) 数据播发系统: 系统通过GSM-R 网络向用户播发为分修i正数据。
差分基准站建立在铁路车站,采用双套GNSS 接收机,每台接收机都根据接收的GNSS 信号,产生差分改正数据,无线闭塞中心(RBC) 根据当前列车位置,把相应的差分基站的差分数据发送给列车。
三、定位系统自主完好性监测技术
在采用组合定位的过程中,由于传感器资源增多、系统结构趋于复杂,因此必须要对组合系统的故障、异常风险予以考虑,以尽可能地提高系统对异常情况的容忍能力,保障安全,提高系统完好性。
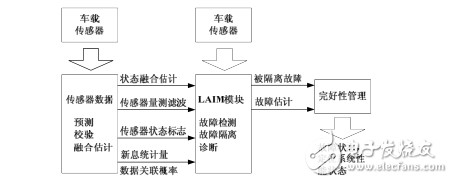
组合定位系统完好性监测要在系统工作过程中对完好性性能状态进行实时的获取和判断,以衡量定位系统在故障(包括传感器、子系统的软故障和硬故障) 导致定位误差超限时及时正确响应的能力。解决方案的重要内容即为实时的故障检测和诊断(FaultDetectionandDiagsi FDD),在基本的卫星定位接收机自主完好性监测(Receiver Autonomous Integrity Monitoring,RAIM) 算法基础上将完好性设计拓展到整个组合系统,实现定位系统自主完好性监测(LocatorAutonomousItgririLAIM),使系统具备及时发现并确定故障来源,从而评估故障等级的能力。下图给出了组合定位系统自主完好性监测的设计原理。
-
把握北斗导航系统机遇,正视民用战略是关键2013-04-28 1516
-
汽车总线及其关键技术的研究2012-07-10 0
-
CDMA原理与关键技术2012-08-16 0
-
北斗模块助力北斗导航系统加速推进军民融合发展2017-09-27 0
-
物联网的关键技术有哪些2020-06-16 0
-
McWiLL系统的关键技术/优势及应用2020-11-24 0
-
北斗导航的优势及应用现状2021-02-05 0
-
智能通信终端有哪些关键技术?2021-05-26 0
-
MIMO-OFDM中有哪些关键技术?2021-05-27 0
-
智能导航系统建设意义是什么?关键技术有哪些?2021-05-27 0
-
POE的关键技术有哪些?2021-06-10 0
-
什么是HarmonyOS?鸿蒙OS架构及关键技术是什么?2021-09-23 0
-
视觉导航关键技术及应用2023-09-25 0
-
北斗导航技术与测试简介2016-02-24 1007
-
视觉导航的关键技术和应用的详细资料说明2020-06-16 1347
全部0条评论

快来发表一下你的评论吧 !
