
资料下载


×
基于MEMS传感器构建电子罗盘系统
消耗积分:1 |
格式:rar |
大小:0.63 MB |
2018-04-17
分享资料个
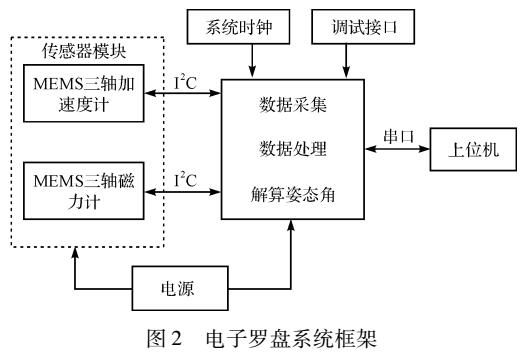
在机器人、航海和航空航天等领域中,都需要导航系统为其导航,导航系统中最重要的就是航向的获得,而传统的罗盘具有体积大、结构复杂、安装不便等诸多缺点,使传统的惯性导航系统无法得到广泛应用。而随着微机电系统( MEMS)技术的快速发展,MEMS器件的制造工艺不断成熟,使MEMS传感器的制造成本不断降低。基于MEMS传感器设计的电子罗盘具有高精度、低成本、结构简单等特点,因此其被广泛应用于军用民用领域。
利用MEMS三轴加速度计SCA3100和三轴磁阻传感器HMC5883L,本研究以单片机STM32作为主控芯片构建电子罗盘,提出用卡尔曼滤波算法对磁阻传感器和加速度计进行数据融合与滤波,构建电子罗盘误差模型,在倾角补偿的基础上以获得较高的航向精度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




