

为什么自动驾驶公司上报的脱离屈指可数?
描述
提到自动驾驶车的路测,就不得不提到脱离(disengagement)。经常有人曲解脱离的含义,即使是很多行业内的人对它的理解也不准确。今天就仔细讲一讲脱离。
上报给政府的脱离:所有脱离中的一小部分
美国加州机动车管理局(DMV)规定所有自动驾驶公司上报所有脱离以及脱离的原因。管理局对脱离(disengagement)的定义是,“a deactivation of the autonomous mode when a failure of the autonomous technology is detected or when the safe operation of the vehicle requires that the autonomous vehicle test driver disengage the autonomous mode and take immediate manual control of the vehicle.”
大致翻译:由于检测到自动驾驶技术失效,或者为了保障驾驶安全,安全驾驶员不得不终止自动驾驶状态,马上手动控制汽车。
DMV定义的脱离只是安全驾驶员介入的脱离,而且前提系统出现问题或者威胁到了安全。但事实上,脱离有很多种,而DMV定义的只是其中的一小部分。这也就是为什么自动驾驶公司上报的脱离屈指可数。
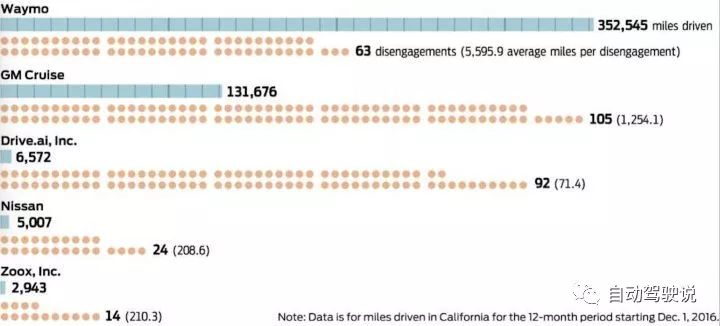
以下是各个公司去年上报的脱离数。
脱离大致分为以下几种。
--技术失效(DMV所指的脱离)这一类脱离最重要。比如汽车突然冲向某个行人、红灯没有减速等等。这些情况下,如果不及时介入,很容易导致车祸。工程师一般都会重点检查这一类脱离,修改code。
--影响驾驶安全(DMV所指的脱离)这一类脱离更为常见。比如汽车不明原因突然提速或减速、距离障碍物太近等等,不会造成致命危险,但是会让乘客感觉很不舒服。安全驾驶员介入之后,数据会交给仿真系统,系统会回放整个情景,判断如果当时驾驶员没有介入,到底会不会撞车。如果会,就要上升为最高级别的脱离。
安全驾驶员介入的脱离
-- 另一种脱离是由于遇到已知驾驶条件范围(ODD)之外的情况。比如形状怪异的车、动物。对于刚刚开始做自动驾驶的公司,这一类脱离数量最多。如果汽车还不会转弯,每次转弯的时候就必须人工介入,转弯之后再恢复自动驾驶状态。随着公司的AI日趋成熟,由ODD导致的脱离也就会越来越少。对这一类的脱离政府完全没有要求。
-- 除了车内的驾驶员介入产生的脱离,远程控制中心的工作人员也可以介入。比如提前预知汽车会经过某施工地段,就可以远程操控自动驾驶车绕过卡车等障碍物。
-- 最后一种是由于任务需要不得不做的脱离。比如驾驶员终止自己的这次任务,或者去午休,或者同行的工程师需要中断驾驶,检查code,等等。
-- 以上都是需要安全驾驶员介入的脱离。其实还有一部分脱离是机器人自动检测出问题,主动终止自动驾驶状态。比如自动检测到有一个摄像头出了故障,或者由于某些原因数据传输过慢,这些一旦检查出来,机器人就必须自己主动终止自动驾驶状态。
非人工介入的脱离
-- 这一类脱离现在非常少,只有做出实车的公司会有这类脱离,也就是在没有司机的情况下,乘客自己按下紧急停车按钮,终止自动驾驶状态。之后会由远程控制中心的工作人员介入,远程驾驶。
乘客做出的脱离
脱离≠介入
一些朋友也许听过intervention这个词,也就是“介入”。介入其实是DMV所指的脱离,特指有安全驾驶员介入的脱离,只是脱离中的一类。介入这个词在MPI(Miles per Intervention)计算中会用到,也就是平均每多少英里有一次介入。除了这种情况,一般还是用“脱离”比较准确。在一些公司里,“介入”仅用于特指最高级别的脱离,也就是说如果不介入就会导致车祸。
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 0
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
自动驾驶的到来2017-06-08 0
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰william hill官网2017-09-13 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
联网安全接受度成自动驾驶的关键2020-08-26 0
-
如何保证自动驾驶的安全?2020-10-22 0
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 0
-
自动驾驶技术的实现2021-09-03 0
-
2018年DMV自动驾驶脱离报告出炉2019-02-19 4608
-
案例研究:什么是自动驾驶2023-06-06 307
-
从零开启自动驾驶工程师之路(一)2023-06-06 236
全部0条评论

快来发表一下你的评论吧 !
