

编码器分辨率是什么,编码器的分辨率与精度介绍
编码与解码
描述
编码器的分辨率是指编码器轴转一圈所输出的位置数,比较常用的是增量式光电编码器,它的分辨率又称为线数,比如2500线4倍频,那么它的分辨率就是2500*4=10000个脉冲。编码器的分辨率越高说明电机的最小刻度就越小,那么电机旋转的角位移也就越小,控制的精度也就越高。
分辨率与精度
编码器的精度,是指编码器输出的信号数据对测量的真实角度的准确度,对应的参数是角分(′)、角秒(″)。
分辨率:线(line),就是编码器的码盘的光学刻线,如果编码器是直接方波输出的,它就是每转脉冲数(PPR)了但如果是正余弦(sin/cos)信号输出的,是可以通过信号模拟量变化电子细分,获得更多的方波脉冲PPR输出,编码器的方波输出有A相与B相,A相与B相差1/4个脉冲周期,通过上升沿与下降沿的判断,就可以获得1/4脉冲周期的变化步距(4倍频),这就是最小测量步距(Step)了,所以,严格地讲,最小测量步距就是编码器的分辨率。
编码器精度与分辨率的区别
对于传感器的分辨率与精度的理解,可以拿千分尺为例,分辨率代表千分尺最多可以读到小数点后几位,但精度还与尺子的加工精度,测量方法有关系。
同样的,在旋转编码器的使用中,分辨率与精度是完全不同的两个概念。
编码器的分辨率,是指编码器可读取并输出的最小角度变化,对应的参数有:
每转刻线数(line)、每转脉冲数(PPR)、最小步距(Step)、位(Bit)等。
编码器精度计算公式:
轮周长(mm)÷编码器的分辨率(P/R)×齿轮比=? mm/P 多少毫米发出一个脉冲
P/R:Pulse/Run脉冲数/圈,每一圈发出多少个脉冲 圆周长=直径Φ×圆周率3.14
分辨率与精度的关系能够用下面的几个图证明:
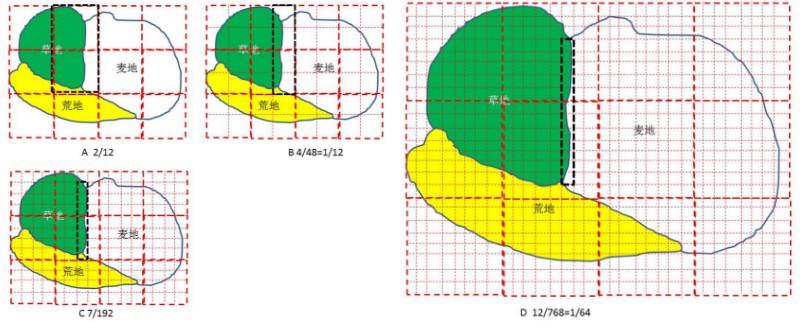
上面四个图是相同的面积,让我们看草地与麦地的边界(请注意黑框中的边界格子)。
图A有12格子,边界格子是2格,如此这两个格子是不确定的,因此,不确定度是2/12。
同理,图B中有48个格子,有四个边界格子,如此, 不确定度是4/48。
图C 不确定度是7/192. 图D是不确定度是12/768。
不确定度降低,自然精度就提高,证毕
关于A/D的精度、分辨率与LSB误差的大扫盲
我们所讲的精度通常是指它的精确度,其实这是错误的。
精度又叫做精密度,是跟准确度相对应的一个概念。
就像打靶一样,打的准,那就说它的准确度比较高;
而每两个靶之间能打出的偏移越小,那它的精密度就越高。
精密度 + 准确度 = 精确度。
- 相关推荐
- 编码器
-
编码器的分辨率如何理解?2021-03-14 21705
-
拉线编码器的分辨率与精度相同吗2020-06-11 0
-
伺服电机编码器分辨率2018-08-02 16608
-
绝对值编码器分辨率2018-08-02 15201
-
编码器怎么计算距离,编码器分辨率是什么2018-08-02 35119
-
编码器是如何确定分辨率的2019-06-11 12226
-
旋转编码器的分辨率如何选择?2022-02-07 2654
-
影响编码器分辨率和精度的因素2022-09-30 4413
-
选择增量编码器分辨率的方法,影响增量式编码器分辨率的因素2023-07-26 1665
-
光学编码器分辨率的定义方法2023-08-18 1187
-
编码器分辨率是什么意思 编码器分辨率和脉冲数的关系2024-02-21 4223
-
伺服编码器分辨率越高越快吗?2024-03-21 1051
-
伺服电机编码器的分辨率是多少2024-06-17 1530
-
伺服编码器分辨率是什么意思2024-06-17 911
-
模块式编码器原理 精度与分辨率2024-08-12 328
全部0条评论

快来发表一下你的评论吧 !
