

采用模糊控制算法实现TSC无功补偿的控制设计
描述
1 引言
在电力系统中,异步电动机和变压器等设备要消耗大量的无功功率。这些无功功率如果 不能及时地得到补偿的话,会对电网的安全、稳定运行产生不利影响。提高电网功率因数, 确保供电质量和电网运行的经济性具有重要的现实意义。
晶闸管投切电容器(thyristor switched capacitor,TSC)是一种并联的晶闸管投切的电 容器,通过对晶闸管阀进行全导通或全关断控制,可阶梯式改变其等效容抗。它通常由多个 并联的电容器支路组成,每个支路都由设有触发角控制的晶闸管阀来投切,从而达到阶梯式 改变注入系统无功功率的目的。对TSC 的控制策略[2-3],目前工程上广泛采用的是九区图控 制法[4],该方法没有考虑电压与无功的相互影响,控制方法比较简单粗糙,存在控制性能不 好,投切振荡等问题。
2 TSC 的基本原理
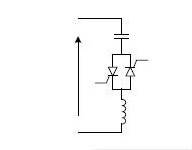
单相的TSC 的基本结构如图1 所示,它由电容器、双向导通晶闸管(或反并联晶闸管) 和阻抗值很小的限流电抗器组成。限流电抗器的主要作用是限制晶闸管阀由于误操作引起的 浪涌电流,而这种误操作往往是由于误控制导致电容器在不适当的时机进行投入引起的。同 时,限流电抗器与电容器通过参数搭配可以避免与交流系统电抗在某些特定频率上发生谐 振。TSC 有两个工作状态,即投入和断开状态。投入状态下,双向晶闸管(或反并联晶闸 管)导通,电容器(组)起作用,TSC 发出容性无功功率;断开状态下,双向晶闸管(或 反并联晶闸管)阻断,TSC 支路不起作用,不输出无功功率。在工程实际中,一般将电容 器分成几组,每组都可由晶闸管投切。这样可根据电网的无功需求投切这些电容器,TSC 实际上就是断续可调的发出容性无功功率的动态无功补偿器。
3 九区图控制法原理及缺点
传统的无功补偿九区图控制法如图 2 所示:
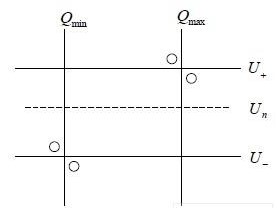
九区图控制原理存在的问题主要是:控制策略是基于固定的电压无功上下限而未考虑无 功调节对电压的影响及其相互协调的关系;用于运算分析的信息有分散性、随机性的特点, 造成了控制策略的盲目和不确定性,实际表现为设备频繁调节。当系统运行于第7 区的运行 点①时,无功合格、电压偏低,这时应该是调节变压器分接头,使电压升高。可是电压和无 功是相互影响的,电压升高,功率因数会变大,这时运行点有可能进入1 区在②点运行。此 时,电压合格、无功越下限,应该切电容,如果这时己经没有电容器可切除则降低电压,这 样又会影响电网中的无功功率,有可能使运行点回到①点。因此会造成升压→降压→升压→ 降压……,这样的操作指令,使运行点在1 区和7 区之间来回振荡。另外,相似的情况在运 行点③和④之间也存在。
4 模糊控制策略
4.1 模糊控制器的结构
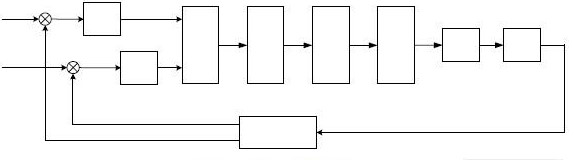
本文采用的模糊控制器[5]的结构如图3 所示,选择电压偏差△U 及无功偏差△Q 作为模 糊控制器的输入变量,选择无功功率的补偿量△C 作为模糊控制器的输出变量,从而构成2 输入单输出的模糊控制系统。
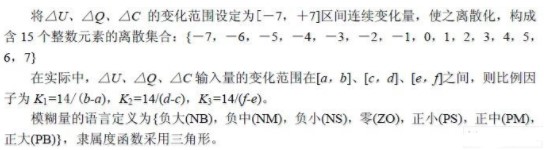
4.2 输入∕输出变量模糊化
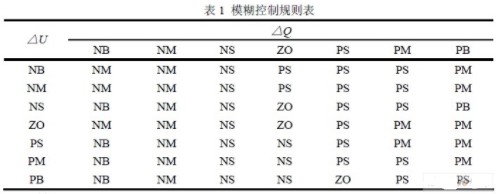
4.3 模糊控制规则
模糊控制规则可以用如下模糊语句的形式来描述:
结合实际工作人员的经验,可以得到模糊控制器的控制规则表,如表1 所示。
4.4 模糊推理
确定了模糊推理系统的模糊输入变量,输入变量的隶属度函数和控制规则,就可以对模 糊推理系统进行模糊推理。本文采用Mamdani 推理法。Mamdani 推理法是一种在模糊控制 中普遍使用的方法,在本质上是一种合成推理方法。Mamdani 模糊蕴含关系A→B 用A 和B 的直积表示,即有:A→B=A×B,即R(u,v)=A(u)∧B(v)。

4.5 解模糊
在得到模糊关系矩阵之后,将输入变量的向量和关系矩阵运算,可以得到输出量的模糊 子集。将输出量的向量通过非模糊的方法,可以计算出输出量模糊论域中的一个值,建立控 制表。本文采用了重力中心法对被控量进行解模糊。其计算方法为:
5 仿真及分析
利用MATLAB 里的模糊逻辑工具箱[6],按上述步骤建立一个模糊推理系统,并使用 simulink 建立一个系统仿真模型。用两个随机信号(Random Number)来模拟模糊控制器的 两个输入变量电压偏差△U 及无功偏差△Q,其输出为电容器组的投切数量。仿真波形如图 4 所示。
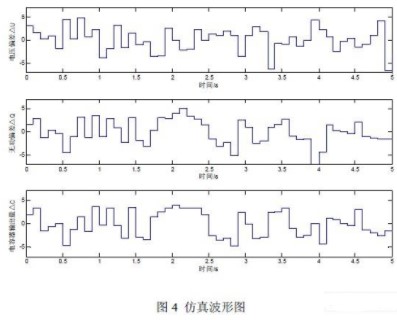
分析如下:
当t=0.4~0.5 秒左右时,电压偏差是负小,无功偏差为零,电容器组投切量基本为0。 因为这种情况基本属于电压、无功合格区,所以电容器组不动作。
当t=0.7~0.8 秒左右时,电压偏差是正大,无功偏差是正大,投电容器量是正中的,因 为无功偏差是正大的,通过投电容器可以降低电网无功,但考虑到电网电压偏差很大,所以 投电容器量没有选择是最大的。
当t=2~2.1 秒左右时,电压偏差为零,无功偏差为正大,投电容器组的量为正大。因为 无功偏差为正大,即需要补偿大量的感性无功,通过投电容器组,可以补偿感性无功,提高 电网的功率因素。
当t=2.8~2.9 秒左右时,电压偏差正小,无功偏差负大,切电容器组的量为负大。因为 无功偏差是负大的,通过切电容器可使无功变大,在无功偏差与电压偏差相比时,本控制策 略更偏重于对无功的补偿,因为提高电网中的功率因数可以使电能质量大大提高。
6 结论
本文通过对传统九区图控制法的分析,指出其缺点,研究了电压无功综合控制的模糊推 理系统。并使用MATLAB 进行辅助设计,由仿真结果可知,该模糊推理器对于电容器的综 合控制己经达到了要求。
本文创新观点:采用模糊控制算法实现TSC 无功补偿的控制,与传统九区图控制 法相比,具有很大的优越性,该控制系统减少了电容投切次数,增加了系统的稳定性。
-
基于FPGA的模糊PID控制算法的研究及实现2013-03-18 0
-
神经模糊控制在SAW压力传感器温度补偿中的应用2018-10-24 0
-
模糊PID控制算法如何控制匀速升温2019-05-30 0
-
一文知道无功补偿单片机的控制过程2020-10-22 0
-
基于DSP控制的新型静止无功补偿控制器的设计2009-03-15 1175
-
基于PLC的无功补偿控制系统2009-09-01 425
-
基于模糊控制的TSC无功补偿系统的研究2010-02-21 508
-
变电站电压无功模糊控制方法的研究2010-10-14 545
-
ELSPEC动态电容补偿柜/快速TSC无功补偿柜简介2010-03-24 2520
-
TSC和APF补偿指令的计算2011-09-02 1343
-
TSC和APF无功和谐波补偿时补偿指令计算2011-09-20 1152
-
APF与TSC混合补偿装置控制策略设计2017-01-07 681
-
TSC无功补偿控制策略研究及仿真分析2018-03-07 1173
-
无功补偿控制器怎么设置参数 无功补偿的作用和原理2024-02-01 5336
全部0条评论

快来发表一下你的评论吧 !
