

在FPGA中实现了气象杂波图的设计与解决了边缘问题
描述
1 引 言
无论什么体制的雷达都会受到其工作环境中的噪声和杂波的干扰,从噪声和杂波中发现目标是雷达信号处理的基本任务。在碧空如洗的天空,空中目标检测是最容易的,随着气象变化,会遇到云、雨、雪、冰雹等不同天气,那时目标检测变得相对困难了。各国都有专门的气象雷达用来分析上述气象目标,但对于检测飞机、导弹等飞行目标而言,这些气象目标称之为气象杂波。本文将立体杂波图应用于气象杂波的CFAR处理,根据当前杂波环境的变化实时地产生杂内杂外标志,从而选择不同的信号处理支路处理当前气象杂波,提高了雷达的检测性能,降低了虚警概率。
2 气象杂波
立体杂波包括:气象杂波、箔条杂波、地杂波等杂波,但气象杂波不同于地杂波等其他类型的立体杂波,他有其自身的特殊性,气象杂波一般情况下并非静止不动的,其各处的厚度也不一样,分布不均匀,尤其是稀薄带分布的随机性,气象杂波的这些特点使得他的边缘情况十分复杂,在处理时也增大了难度,因为检测门限稍微偏高的话,稀薄处的气象杂波在处理时就成为了杂外;相反,如果门限稍微偏低,那么稀薄处的气象杂波在处理时就成为了
杂内,不同的判断将导致不同的处理选择。本文将重点讨论这种边缘效应的处理。一般情况下,气象杂波的回波幅度服从瑞利分布[2],若以x表示气象杂波回波的包络幅度,以δ表示他的平均功率(即标准差),则x的概率密度函数为:
3建立杂波图的算法
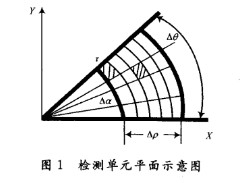
对于气象杂波要考虑到气象杂波运动的特点,合理选取杂波单元的大小。本文仅讨论分布相对均匀的大片气象杂波,在均匀杂波背景中,单元平均算法相对其他算法而言,其检测性能是最优的,采用检测单元△V内数据平均,本单元相邻扫描间相关积累。如图1所示,设距离分辨单元的尺寸为r,一个脉冲重复周期内扫描的角度为△α,杂波单元△V内分辨距离单元数为M,脉冲数为N,则△ρ=Mτ,△θ=N△α,任一杂波检测单元的幅度为A(i,j),(i,j)是杂波单元的坐标,每个脉冲重复周期内,正常信号输入序列为xn(i‘,j’),那么:
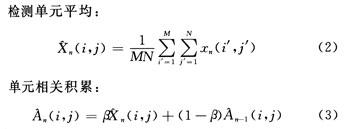
其中,β为叠代因子,合适的叠代因子使每幅杂波图的权重分配均匀。An(i,j)为相邻两个天线扫描周期按式(3)作相关积累运算后存入同一杂波单元△V的数据,所有仰角区的杂波图的单元都以这种方式更新数据。假设噪声服从瑞利分布,则在杂波与噪声同时存在的情况下,递归后幅度分布也为瑞利分布。在设定噪声和杂波的均值和方差的情况下,根据Neyman-pearson准则,利用式(4)和式(5)在Matlab软件下进行仿真,可以得到气象杂波的虚警概率和检测概率与其相应参数的关系曲线图。
其中,M为检测单元内的分辨单元数,随着杂噪比SNR和分辨单元数的增大,检测概率越大;图5表明:β取1/8递归时虚警概率相应较小,同时也看到,门限设置越大,虚警概率越小。
4边缘效应的处理
当目标处于大片的气象杂波中时,由于目标周围杂波的平稳性,基本的邻近单元平均CFAR威廉希尔官方网站 是性能是非常好的,但在气象杂波边缘,杂波的变化剧烈,位于各参考单元里的杂波强度有明显的差别。对比了CA,GO,OS,MX-CMLD等几种算法抗边缘杂波的性能,通过分析认为,包含GO(选大)逻辑的检测方法的抗边缘杂波性能均较好。为了消除边缘效应,下面将讨论如何建立轮廓杂波图,他不表征杂波的具体信息而是判断杂波相对强弱的。 杂波强弱判断准则采用双门限进行检测。
首先判断杂波检测单元是否超过噪声门限,然后对超过噪声门限的分辨单元用计数器进行积累,当该检测单元内的计数值超过一定值,即门限2时,认为该检测单元处于强杂波区,输出一位信息1;如果该计数值小于门限2,则认为该检测单元处于弱杂波区,输出一位信息O;为了消除杂波的边缘效应,轮廓杂波图还必须对检测单元进行方位、距离的区域扩展处理,扩展的方法为:对检测单元进行判断杂波强弱的同时,也判断和他在距离、方位上相邻的参考单元的杂波强弱情况,最终将这些单元的判断结果“相或”,只要其中一个有杂波,就认为该检测单元处于强杂波中,扩展的单元数目一般选为8个,扩展的方法一般采用田字型。
5杂波图的实现
在雷达信号处理中除了上述的轮廓杂波图外还有其他几种类型的杂波图,下面我们只讨论动态杂波图。
在正常通道信号处理中,在休止期对一定数量的噪声数据平均后乘以门限因子K作为噪声门限,动态杂波图的数据与该噪声门限经比较器比较后产生杂内杂外标志,杂内杂外标志用于选择不同的信号处理通道进行数据处理,在有杂波区,选择对消通道进行信号处理,在无杂波区,选择正常通道进行信号处理,以减小全程MTI处理带来的不必要损失。
6硬件实现
我们设计的整个杂波图的信号处理都是在FPGA中完成的,其中动杂波和超杂波各配有1片和4片RAM,用来存储杂波图数据。其中超杂波要求目标的空间位置定位更为准确,所以在杂波单元划分上也更为精细,存储的数据量与动杂波图相比较大。另外2片CPLD分别是用来完成自动增益控制和反异步干扰的。
将杂波图数据存储在外部RAM中,通过时序控制他的读写,使得杂波图数据得以更新,同时也方便了脉冲间数据的递归运算,从而使动态杂波图产生杂内杂外标志的重要功能得以完成,而没有外部存储器是难以完成这些功能的。
7 结 语
本文讨论了用单元平均算法处理大片分布相对均匀的气象杂波,并运用轮廓杂波图解决气象杂波的边缘问题,并在Matlab 6.5下对算法性能做了相应仿真,效果较好,最后给出了整个硬件威廉希尔官方网站 的结构框架图,并在FPGA中实现了整个信号处理过程。
-
基于FPGA的实时边缘检测系统设计,Sobel图像边缘检测,FPGA图像处理2024-05-24 0
-
基于FPGA的数字图像处理中的边缘检测系统2013-06-26 0
-
基于FPGA的Sobel边缘检测的实现2017-08-29 0
-
基于FPGA的边缘检测和Sobel算法2017-11-29 0
-
如何利用FPGA实现Laplacian图像边缘检测器的研究?2019-07-31 0
-
如何使用ECP5FPGA解决网络边缘应用设计挑战2020-10-21 0
-
怎样去设计基于FPGA的实时图像边缘检测系统2021-07-28 0
-
基于FPGA的实时图像边缘检测系统设计(附代码)2023-06-21 0
-
Laplacian图像边缘检测器的FPGA实现2010-12-24 679
-
LOG算子在FPGA中的实现2011-05-16 1128
-
数字图像边缘检测的FPGA实现2016-01-04 710
-
基于雷达的杂波速度谱图的建立方法2017-11-18 3569
-
如何使用FPGA实现外辐射源雷达自适应杂波抑制的方法概述2019-01-07 1474
-
关于FPGA的雷达杂波速度谱图的实现方法2021-05-05 2879
-
基于FPGA实时图像边缘检测系统的实现2022-04-21 2603
全部0条评论

快来发表一下你的评论吧 !
