

基于多传感器信息融合技术的自主式移动机器人导航系统设计
描述
1 引言
自主式移动机器人(Autonomous Mobile Robot) 是一个对外界环境高度开放的智能系统,需要对各种复杂的外部环境作出实时感知和决策,控制运动机构完成各种驾驶动作,实现道路跟踪和避障等功能。在自主式移动机器人的研究中,机器人的精确定位一直是研究的热点问题。而光电导航系统就是机器人的一个“眼睛”,在其运动中起着非常重要的作用。
机器人的控制要求实时性、快速性、精确性。但传统的控制方案对较要求复杂环境中的机器人控制具有局限性。而模糊控制响应快、超调小且鲁棒性好,可以通过改变控制等级来调整系统的稳态误差,已成为移动机器人导航的一种重要方法[2]。因此本文针对特定引导路径下的移动机器人,给出了基于模糊控制信息融合方法的解决方案。将光电传感器采用非线性分布,并将其采集的信息融合后,作为表格查询的模糊控制方法的输入,从而提高了该导航系统的可靠性和鲁棒性。
2 导航系统的设计
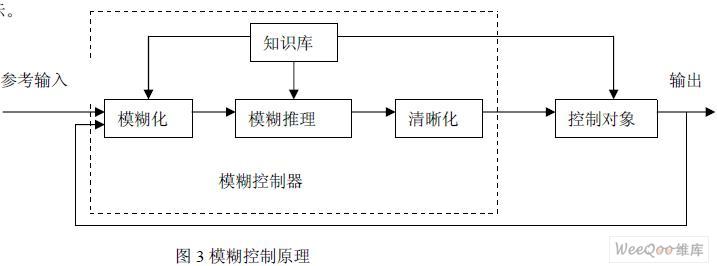
在机器人沿路径引导线行驶的过程中,会出现车位中心线偏出的情况。为了保证自主式移动机器人能准确跟踪路径引导线,在机器人的车体下方安装了三组光电传感器。每个传感器即为一个检测点,其结构如图1 所示。三组光电传感器的安装图可参见图2。使用一维传感器的信息存在片面性,所以将传感器分成了三排,利用多传感器信息融合的技术,提高检测数据的精确性和可靠性。
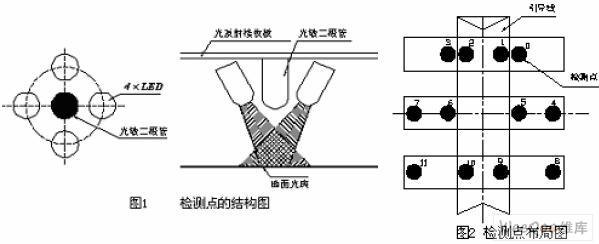
在机器人行走过程中,通过导航系统不断检测地面上的引导线的信息,检测自身的位置状态,通过光电传感器所构成的检测系统立即将检测结果转化为模拟信号,该信号经过放大、光电耦合隔离后,输入到A/D 转换通道,并与既定的阈值进行比较。当传感器位于黑色引导线上时,输出为高电平,数字信号为1;当其不在引导线上时,输出为低电平,数字信号为0。将检测点的结果融合后作为模糊控制器的输入,机器人按照模糊控制表进行判断调整。
3.模糊控制算法的设计
3.1 原理
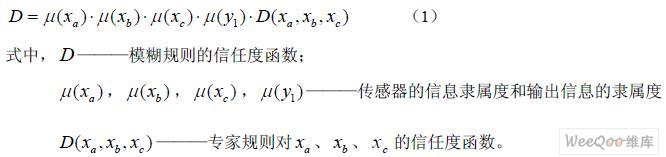
模糊控制是一种模仿人的控制方法,通过用一组语言描述的规则来表示专家的知识。其原理如图3 所示。表格查询学习算法是模糊控制实现的一种方法,它只需对输入和输出数据对和语言性模糊用“if-then”规则进行一步运算即可。这个方法的基本思想就是从输入-输出数据对中产生模糊规则,最终的模糊系统将从组合模糊规则中产生[5]。
3.2 算法的实现步骤
3.2.1 模糊知识库的产生
由图 3 可以看出,知识库是模糊控制系统的核心,因此要确定模糊系统,获取模糊知识(规则)是极其重要的。本文的表格查询学习算法是通过输入-输出数据对的分析并结合专家经验产生模糊规则,根据组合模糊规则进行模糊控制规则表格的设计,然后再在实验中进行校验。其方法具体如下:
第一步 将输入-输出空间划分模糊区间
本文将光电检测传感器(如图 2 所示)分成了三排,每排4 位为一个采集信号,这样在采集过程中,传感器的采集信号就为三个。输出信号为机器人的位置,即输出信号为一个。把这四个信号采集量模糊化。
对四个信号量的取值空间进行划分,可分为7 个部分,分别为LB、LM、LS、CE、RS、RM、RB,即左大偏、左中偏、左小偏、中间、右小偏、右中偏、右大偏。通过机器人在线学习的方法,建立运动状态数据库,即通过机器人无调节行驶,由机器人自行对运动状态进行采样、储存,建立运动当中的偏差与类型数据库。通过记录文件得出数据统计表1、表2 和表3。如表所示,一排四个传感器,预设状态为16 个,通过实际检测,对状态值进行滤波,即状态出现次数小于所有状态出现次数之和0.2%的状态,定义为不可能状态,表示为0;可能状态表示为1。

第二步由已知的输入-输出数据对产生模糊规则
首先求出不同区间上四个信号xa 、xb 、xc 、y1 对应的隶属度。其次将已知的四个信号xa 、xb 、xc、y1 数据分别定位于最大隶属度对应的区间上。最后,从每一对比较满意的输入-输出数据对中产生一条规则。如if xa is CE , xb is CE, xc is CE then y1 is CE. 用上述规则产生的是“逻辑与”规则,即在规则当中只有当if 部分的条件都同时满足时,“then”部分的结果才会发生。
第三步 每一条规则赋予一个置信度
由于有许多数据信息,而每一对数据产生一条规则,这样很可能会出现自相矛盾的规则,所以我们结合这些数据对的经验信息,比如,让一位专家来检查所有的数据对,这个专家就可能看出哪些数据有用,哪些数据是关键性数据,哪些数据不太合理或有量测误差产生。因此可以为每一对数据加一个信任度表示数据可靠性的相信程度。依据此方法建立的信任度函数如下所示:
第四步 组合模糊规则库的产生
表 4 就是一个模糊规则库,我们可以用以下的准则把模糊规则填入表中的空格:组合模糊规则库中的规则于数据本身的规则,需附加一条专家的信任度以反映专家对规则可靠性的信任度,如果模糊规则库中某一空格对应的规则不止一个,则选用具有最大置信度的那一条规则。每排传感器的信息分为7 个,三排输出状态应为343 种。根据机器人实际运行的环境与特点,我们选其中的16 条规则建立规则库。

第五步根据模糊规则确定映射关系。
利用下列中心平均解模糊公式就可以有输入 xa、xb、xc,求出输出量y:
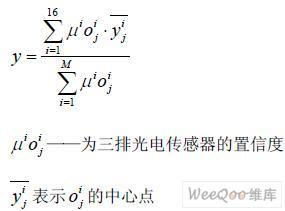
3.2.2 根据模糊规则库建立模糊控制表
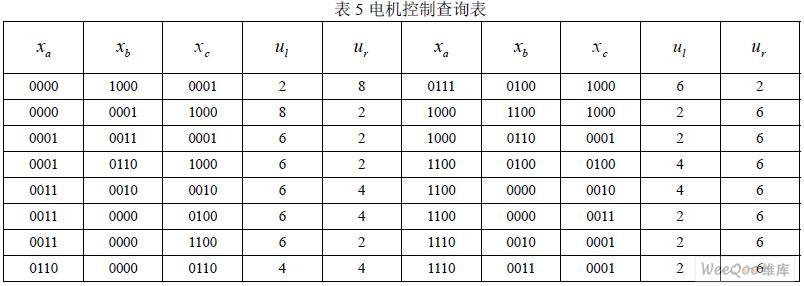
根据表 1、表2、表3 记录的机器人运行过程中各排光电检测传感器的状态,将速度等级划分为2、4、6、8 四个等级,并通过大量的实验,进行计算与修改,得到表5。u1 、ur分别为左、右轮的速度。当所有的光电传感器的状态均为0 时,在原地进行旋转搜索。其余状态,视为无偏,左、右轮速度均为4。
4. 实验结果
依据表 5 实现自主式移动机器人系统的运动控制。使机器人在环形引导线上长期运行。实验结果如图4 所示。从图中可以看出机器人能够实现路径跟踪和自动纠偏的功能,而且在直线部分调整比较小。

5.结论
本文针对具有引导线环境下的路径跟踪这一热点问题,提出了利用多传感器信息融合技术,将所融合的信息作为模糊控制器的输入,实现了机器人的路径跟踪和自动纠偏的功能。该导航系统已应用到“导游”机器人中,实际运行结果表明了本文所提出的导航系统具有很好的鲁棒性和可靠性。
-
基于超声波传感器的自主移动机器人的探测系统2012-01-19 0
-
移动机器人常用传感器2012-08-20 0
-
Labview My RIO 移动机器人2016-08-21 0
-
机器人想要实现智能移动,必须具备超强的自主定位导航能力2018-01-03 0
-
基于超声波传感器的自主移动机器人探测系统2018-11-02 0
-
基于MSP430F149单片机设计的室外移动机器人组合导航定位系统2019-07-11 0
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 0
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 0
-
仿生四足机器人中多传感器信息融合的应用有哪些2020-08-18 0
-
如何实现移动机器人的设计?2020-11-23 0
-
请问怎么设计一种室外移动机器人组合导航定位系统?2021-04-19 0
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 0
-
自主式移动机器人导航研究现状及其相关技术2009-07-10 543
-
基于模糊控制信息融合方法的机器人导航系统2010-02-23 465
-
基于ARM的移动机器人组合导航系统设计与实现2017-09-25 825
全部0条评论

快来发表一下你的评论吧 !
